ジャッジ動画で使ったフライトのJSONファイルは、ここからダウンロードできます。 P23_20221015(10).json
ジャッジ練習
フライトコーチ・ジャッジの映像です画像
moon様 詳細な実験データをご報告頂き、ありがとうございました。画像を拝見しますと、45度傾斜の方がNSatsの値も全体的に大きいようですし、それぞれの誤差の値も小さく見えます。moon様のご賢察の通り結果が出ているように思えますが、如何でしょうか。45度傾斜の効果が期待されます。 私の方でも衛星の捕捉数が少なくなる原因を更に探ってみました。下図は、以前別のトピックで報告致しましたKMZファイル作成プログラムを用いて、P-23のLOGファイルのPOS位置データをKMZ形式に変換し、Google Earth上に表示させたものです。図中には、NSatsが12以下となる位置(ArduPilotでは12以上が推奨値)も黄色いピンで表示させました。 この図ですと、込み入っていて分かり難いので、トライアングルのみ抜き出して表示させたものが下図です。 この図を見ますと、機体姿勢が背面の時にNSatsが12以下になる割合が多いように思います。他のマヌーバも調べた結果、機体姿勢が垂直あるいは背面の場合にNSatsの値が小さくなるように思われます。機械学習で得られた結果と同様な結果となりました。もう少し他のフライトデータも調べてみたいと思います。
パターンフライトは、飛行機を上手に飛ばすテクニックはもちろん大切ですが、決められた通りに飛んでいるかが大事になります。 飛行の判定は、そういったパターンフライトを知る上でとても役に立つ事なのですが、最初から点数を付けるのは難しいですね。 そこで、これは昔、大会前の審査員実習で教わった事なのですが、こんな感じでやってみてはどうでしょう。 1) まず他の事は無視してラインだけに注目し、ラインの異常の数を数える。 2) 次は、R(曲線部)だけに注目して、異常の数を数える。 3) 仕上げは通常通りの判定 というものです。
何だそんな事、と思われるかもしれませんが、1つ1つのパーツごとに見るという点では役に立つと思います。 是非、FCジャッジで試してみてください。
1)のラインについて、 初めと終わりが分かりますか? 角度や長さは問題無いですか?
こんな感じで1つ1つやっていくと、何か見えて来るものがあるはずです。
ビデオ制作に苦労されたと思います。 プロッタとジャッジを同時に二画面で見られることに驚きました、素晴らしいですね。
二画面を見て、ジャッジはポリゴン処理されたように、実際のフライトを細かく再現しているように思いました。 denkado様のいつものフライトそのままです。 見たとおりに見事に再現されています。
対してプロッタは、リボンの航跡のためか現実感から少し離れてしまいます。 それだけジャッジの再現性が優秀なのかもしれません。
本題ですが、採点は経験が無ければ難しく早く自動採点になってくれればと思います。
TakJP様 多岐にわたる情報ありがとうございます。
GPSアンテナとコンパス付き基板を分離(最下段に詳細記述)し、再チャレンジしました。
結論から、 母体数が少ないため、45度傾斜での衛星捕捉数の平均化の効果は継続調査します。 良い感じです、まずは最初の比較結果です。
以下の感想は、私見を含みますのでご容赦ください。 5フライトしました、すべてジャンプは無くOKです。 GPSアンテナを45度傾斜と水平に配置したP23フライトの各5例の比較です。 水平は前日データ取得、45度傾斜は今日のデータです。 両日ともにスマホによる衛星チェック結果は42~45程度の衛星捕捉数、ほぼ同条件と思います。
45度傾斜したものは、 衛星捕捉数(NSats)は水平時と同等、最低値が少し高い感じがする。 水平方向の精度(HDop)は同等か数値が大き目にでるので精度は少し低下するように見えます。
カルマンフィルタによる推定値とセンサーからの算出値を比較した誤差について、 45度傾斜したものは、 位置エラー(XKF4_SP)は水平時とほぼ同等です。 コンパスエラー(XKF4_SM)は平均値、最大値が小さ目に出ます。 速度エラー(XKF4_SV)に大きな差が出ます。平均値、最大値共に小さく、水平に比べて最大値は1/2~1/15の値です。、5フライト全て最大値0.5以下です。
比較の一例です。 データを添付します。上が45度傾斜のもの、下が水平時のものです。
衛星捕捉数(NSats) : 14~18.71~20 @45度傾斜、14~18.15~20 @ 水平 水平方向の精度(HDop) : 0.65~0.68~0.8 @45度傾斜、0.59~0.64~0.74 @ 水平
下記の閾値は0.6です。 位置エラー(XKF4_SP) : 0~0.03~0.24 @45度傾斜、 0~0.03 ~0.17@ 水平 コンパスエラー(XKF4_SM) : 0~0.12~0.34 @45度傾斜、 0~0.15~0.40@ 水平 速度エラー(XKF4_SV) : 0~0.08~0.47 @45度傾斜、 0~0.11~0.91 @ 水平
<手持ちGPSの改造> 使用GPSはケース入りGPSをケースを外し使用していたものです。 GPSアンテナ(セラミックの四角い茶色)はコンパス基板と一体型のため、アンテナと基板との半田付けと接着部を剥がして分離型に変えました。 BN-880であれば、両面テープによりアンテナと基板が接着されているのみです。 半田を外す必要はなく簡単にできると思います。自己責任でお願いします。
実際に点数を付けてみました。 これがその動画です。
そこで、今回は動画の様に、リボン図を補助に使ってみました。 ジャッジ画面で分かり難かった事をリボン図で確認する様な感じです。 その結果、まあ納得できる数字にする事ができました。
これが、リボン図や、そこにある機体の拡大画像だけを使って、原則通り採点すれば、みんな酷い点数になってしまうでしょうから、現実的には仕方のない事でしょう。
採点には、0〜10点でその演技を評価する、バランス感覚も必要なのです。
人間が評価する場合、もちろん個人差があって、それはそれで構わないのですが、朝から晩までその基準が一定かと言うと、それは中々難しいでしょう。
そんな事からも、機械による判定は必要と思うのです。
その機械による判定ですが、当然研究が進んでいる様で、聞くところによると、 機体やパイロットによって目標とするフライトは違うので、瞬時にそのフライト用のテンプレートを作ってそれを基準に採点する様な事も考えているらしいです。 まぁ、どんな形で実際に登場するのかは分かりませんが、楽しみなところです。
moon様 早速実験して頂き、ありがとうございました。ご指摘の通り一体型の場合難しそうですね。 ところで、LOGファイルを眺めていたところ、下図のようにジャンプが発生しなくても衛星捕捉数が少なくなるとGPSの位置情報とカルマンフィルターによる位置の推定値POS( = JSONファイルの位置情報)にずれが生じています。 これらをPlotterで用いているPilot座標(原点がPilot位置)に変換してみますと、下図のようになります。 X軸がPilotから見て右方向、Y軸が前方です。X方向は両者に違いは無いのですが、Y方向は大きく異なっています。つまり、同じ時刻では前後方向に大きいところで数十mずれています。実際のところ、カルマンフィルターによる推定値、つまりリボン図の方がGPSの値よりも正しいと思われますが、いずれにしてもジャンプが無い場合でも衛星の捕捉数が少ない場合には注意した方が良さそうですね。
GPSを45度傾斜し取りつけた際の写真です。
今日のフライト結果は惨敗でした。 GPSを5回の全てのフライトで大きなジャンプ出まくり、ミッションプランナー解析ではコンパスエラーが表示されていました。 思慮不足でした。 少し時間は掛かりますが、このコンパスエラーを対策して再度の検討を行う予定です。
GPS内蔵の電子コンパスは向きだけ注意すればよく、傾斜をつけてもOKと考えていましたが、傾斜補正機能付きではないようです。 使用したGPSは、コンパス基板と一体型のためGPSアンテナを45度傾斜するとコンパス基板まで45度傾斜します。 コンパスは水平に置くのがmustのようです。
今回のP23フライト時のデータ比較です。 最初の数字は45度傾斜時のもの、二番目の数値は水平に再度置いた際のジャンプ無しの今日のデータです。 各々一例のみデータです。 45度傾斜の場合、 衛星捕捉数は、やや低下するように見える。 水平方向の精度(捕捉数)は、水平より低下傾向に見える。
衛星捕捉数(NSats) : 7~17 @45度傾斜、 11~18 @ 水平 水平方向の精度(HDop) : 0.6~1.5 @45度傾斜、 0.65~0.95 @ 水平
<ご参考まで> 下記数値は、推定値とセンサーからの算出値を比較し誤差を示したものと考えます。 GPS 45度傾斜したデータは、コンパスエラーのため各数値が大きく頻度も多く出ています。 閾値は0.6以上、閾値オーバーが継続するとジャンプするようです。
45度傾斜の場合、 当然ながらコンパスエラーは大きい。 位置エラーは、GPS捕捉数が低下したため、各演技ごとに大きめに出ている。 速度エラーも、GPS捕捉数が低下したため、各演技ごとに大きめに出ている。
位置エラー(XKF4_SP) : 0~0.9 @45度傾斜、 0~0.3 @ 水平 コンパスエラー(XKF4_SM) : 0~2.0 @45度傾斜、 0~0.5 @ 水平 速度エラー(XKF4_SV) : 0~7.0 @45度傾斜、 0~2.4 @ 水平
moon様 早速、私の稚拙な解析をご検討頂き、ありがとうございました。 私もmoon様同様ジャンプ現象を無くしたいと考えています。特に演技のやり直しができないような状況、例えば競技会などでのFlight Coachの使用を考えると、ジャンプ現象の発生は許されません。私は次の2点を目的に、これまでジャンプの解析を行ってきました。 1.そもそもジャンプが発生しないような方策を考える。 2.もしジャンプが発生してしまった場合でも得られたデータを修正することによって、そのジャンプをリボン図から取り除くことができるような方策を考える。 まだまだ道半ばですが、以前に比べると少しですがジャンプの発生状況やある特定の条件でのJSONファイルにおけるジャンプの修正方法が分かってきました。ジャンプ現象を無くす対策について、もう少しもがいてみようと思います。 さて、今回moon様よりご提案頂きましたジャンプ現象の発生を少なくする対策についてですが、妙案かと思います。確かに、背面での45度降下時は衛星捕捉数が少なくなると予想されますが、GPSからのデータ取得は5Hzですので短時間であれば問題ないように思います。GPSアンテナがもう少し小さくなれば、GPSアンテナを配置を変えて複数個設置するような方法もあるかもしれません。 Ardupilotにとってはそもそも機体姿勢が垂直や背面になることは想定外と思われますので、カルマンフィルターによる推定方法のアルゴリズムを修正する必要があるのかもしれませんが、これらは私にはハードルが高すぎます。 それでは、moon様もし実験結果が得られましたらお知らせ頂ければ幸いです。
ジャンプ現象の解析を拝読しました。 素晴らしい解析ありがとうございました。
この頃は私の装置ではジャンプが見られず、ほぼ100% OKです。 下側水平ラインを可能な限り高い位置(50m以上)で飛ばすように心掛けているのみです。 しかしながら、他の方は前とは違う位置、正面での上昇時に発生しやすい、ジャンプ現象は依然として出ます。 新アプリのジャッジでの自身のフライト再現もできるようになりました。 この素晴らしい新アプリを有効利用するためにも、ジャンプ現象を抑制できるようになれば最高です。
TakJP様の解析結果の背面、上昇、降下時の衛星捕捉数がこの現象に影響しているのは何となく感じていました。 データからも実証されたのでスッキリしました。 GPSのアンテナの配置を水平線から45度(垂直尾翼の前縁と平行)傾けて配置すると、水平、背面、上昇、降下時の衛星捕捉数の平均化が図れると思うのですが、単純な考えです。如何でしょうか。 この場合、衛星捕捉数が最も少ないと予想されるのは背面での45度降下と考えます。
明日から実験してみようと思います。 現状ではジャンプ現象の発生がないのでミッションプランナーの解析から違いを見てみます。
前報に引き続き、ロール角のジャンプへの影響を調べてみました。前報で、リボン図のジャンプに対してGPS衛星の捕捉数を表すNSatsの影響が大きいことが分かっていますので、今回はNSatsとRollの関係を機械学習を用いて調べてみました。なお、Roll(機体のロール軸回りの傾きで水平から右回りを正とし、単位は度。-180 <= Roll <= +180)の正負がNSatsに与える影響に違いは無いと考えられますので、今回はRollの絶対値を用いています。PitchのNSatsに与える影響は前報でやや大きいことが分かっていますので、今回はPitchが正のデータ(機体姿勢は水平から上向き)のみ用いています。下図は、各パラメータ間の相関の大きさを表しています。 前報で報告したように、NSatsに関してHDop及びHAccに強い負の相関があることが分かります。また、Pitchにもやや強い負の相関があります。さらに、今回Rollにもやや強い負の相関があることが分かりました(白い矢印)。そこで、NSatsとRoll間の関係をデータ数の等高線図を用いて調べました。下図はその解析結果を表しています。 Rollが0に近いとき(機体姿勢が正面)、データ数のピークはNSatsが20の領域にありますが、Rollが180に近いとき(機体姿勢が背面)は、データ数のピークはNSatsが13, 14の領域になります(赤い矢印)。したがって、機体姿勢が背面になると、衛星の捕捉数が減少することになります。衛星の補足数は12以上あることが推奨されています。また、GPSデータの取得は0.2秒毎に行われていますので、背面のまま数秒間飛行を続けるとジャンプが発生する可能性が高くなると考えられます。なお、今回の解析に用いたデータ数は約6,500で、全てP-23のフライトデータです。 今回は、機械学習を用いてロール角のジャンプへの影響を調べてみました。本解析結果はデータ取得に用いた機体特有の問題かも知れません。皆さんのフライトデータでもご確認頂ければ幸いです。
画像だと、グリッド線があったり、スピードを変えたりで、色々な事が分かるのですが、 人間の目では、全体の形というより、その瞬間瞬間の動きで判断されるのは仕方のない事ですね。
現在の採点方法も、おかしなところがあったら減点して行くという方式で、全体の形を見てから点をつけるものでは無いのです。
この「ジャッジ用プロッター」には採点画面があるので、自分で採点の練習をしてみると良いです。
ちょっと変だと思ったらマイナス0.5点。 明らかなミスがあったらその度合いによって、マイナス1点〜2点〜3点という感じで。
さて、公平な判定がどれだけ出来るでしょうか。 誰かがこのジャッジ役をやらなければ、競技は成り立たないのです。
やっと娑婆に戻ってこれ、少しずつ模型をいじる元気も出てたので、 しばらく放ってあったAKK_F4_Support_SD_Card(FC)+BN-880の設定を 再開することに。前回はBN-880のコンパスがミッションプランナーで見えて なく、プルアップ抵抗が必要と言うところで終わっていたと思います。 そこでBN-880のSDAとVCC間、VCCとSCL間に2.2KΩの抵抗を入れたところ 見事ミッションプランナーからコンパスが見えるようになりました。 今回、FCにはコンパスがないため、BN-880だけを持ってコンパス キャリブレーションを行ったところ何度やっても終了せず、FCとBN-880を 板に固定して実施したら1発で成功しました。 あとは3Dプリンタでケースを作ってみたいと思います。
自分の飛行が3Dで見られるのは感動です。が演技の形を確認するのは困難かな?
そうですね。 新しいプロッターです。 トピックの冒頭部分が解りにくかったので、手直ししておきました。
こんな凄い機能がどんどん出て来るのですから、使わなければ損ですね。
それと、この画面はジャッジの練習用でもあります。
ただ、人間の目なんて、この画像の様に、ある一面を見ているだけで、しかも瞬間的に判断しなければならないので、 どこまで正確で公平にできるかは微妙なところがありますね。
新機能、どうやって使うの?ってPlight Plotterをいじりまくってしまいました(^^; 新たなURLで起動するのですね(^^)
https://flightcoach.org/judge/plotter.html
P23のサンプル動画をアップしました。
昨夜開こうとしたらエラーが出て見れませんでした。 FCJudgeは version 1.3 のJSONファイルじゃないと見れないんですね。 フライトコーチのHPにも書いてありましたが気が付きませんでした。 MORRISさんがおっしゃるようにセーブし直したら見れるようになりました。 P-23出来なくてもスポーツマンとか普通のフライトでも見れるのでありがたいです。 ありがとうございました。
IMACのフライトもアップされてます。
確かに、 古いJSONファイルを開こうとすると警告が出てしまいますね。
Save JSONボタンでセーブし直したら見られる様になりました。
MORRISさん、書き込みありがとうございました。
優秀なカメラマンに自分のフライトを撮ってもらっている様で、とってもいいですね。 今回の動画は最近のフライトのJSONファイルだったので、何も違和感は無かったのですが、古いのは気をつけてみます。
再生したら、まるで飛行場のお立ち台で見ているようで、ちょっと感動しました。 なお、最新版のJSONファイルにセーブし直さないと読み込んでくれないようですね。
カリフォルニアの方のF23パターンです。 了解を得てアップしておきます。
MK_F25↓
11月30日までに「json」ファイルを提出とあります。 「bin」ファイルでは無いんですね。 「json」ファイルは飛行場の情報を入力する必要が無いので、フライトコーチのマップに登録してない飛行場でのフライトでも、大丈夫という事になります。
Air Craft YuGaの有我さんにリンクのお願いをしたら、早々と登録してもらえました。 福島の飛行場は日本選手権が開催されるだけの事はあって、フライトコーチのMapにもしっかりと載ってます。
ついでに世界の登録飛行場を見てみると、アメリカが結構多くなっています。 フランスは数は少ないですが、ヨーロッパ選手権が開かれる様な大きな飛行場が登録されてます。 日本は変わらずで、ちょっと出遅れて寂しい感じですね。 時代が変わりつつあります。 もちろん、実際の競技会で急激な変化は無いでしょうが、何年か先どうなっているかは誰にも分かりません。
Imai↓
クロス↓
MK_F23↓
Seb_F23↓
ファーストP23↓
hgさん、情報ありがとうございます。 私の場合、MacでSafariを使っているので、最初の投稿の様になりました。 今は次から次と新しくて良いものが出て来るので、情報収集と選択が大切ですね。
私はDeepLのChrome拡張機能を使ってます。 Webページを開きテキストを選択するとDeepLのアイコンが出てくるのでクリックすると翻訳できます。 しっくりこないときはChrome翻訳と比較しながら使ってます。
ちなみにこのページを翻訳するとChromeとちょっと違ってますね。
こんにちは 廉価で入手でき、フライトコーチに適応できるFCやGPSの情報が増えていくと 予算的に厳しい状況でもフライトコーチを利用できるので嬉しいです。 今後もよろしくお願い致します。
soramonさんが教えてくれた裏技の件について、もう少し説明してみます。
データが入っているはずなのに「オリジンが50m以上離れている」と表示され、画面の「OK」を押すと選択画面も消えて、それ以上進めなくなる事があります。
そんな時の対策については、プロッターの青ボタンManualの中にある「Errors」に少しだけ記載がありました。
その方法ですが、 そんな時はもう一度同じBINファイルを開いて、選択画面の飛行場の場所を一旦manualに戻すのです。
manualに変更したら、Copy Originを押します。 すると、パイロットとセンターまですべてがオリジンと同じ座標となります。
そこでSubmitを押すと、この様なリボン図が登場します。
飛行場の方角が指定されていないので、暫定的に南北方向の飛行面となっていますが、 ここまでが、フライトコーチのサイトに載っていた方法になります。
このままでも一応リボン図は見られますが、飛行場の方角を指定してやれば、誤認識したオリジンなりの飛行面が再現できる事になります。 ここからが、soramonさんが教えてくれた方法になります。
センター位置の座標をマップで調べ入力します。
すると、こんな修正画面が再現される事になるのです。
これによって、これまで見られなかったフライトが再生できる様になります。 ただ、飛行場登録していない場所では、次回のBINファイル開示時に座標を入れ直すことになるので、 飛行場所の緯度経度のデータはいつでも見られる様にしておいてください。
パスファインダーをお借りして使ってみました。 当然、テスト済みなので問題無く利用できました。 写真はブログ↓の方にもアップしてあります。 パスファインダー(フライトコーチ)
重量は、写真状態(台座やケーブル込み)で57g
Precision Black Box (Flight Coach) Turn Keyの9/29時点の在庫は3ケでした。 denkado様情報で確認した所10/2現在の在庫は1ケのみとなっています。 ほんの少量ですが、徐々には売れているようです。

ジャッジ動画で使ったフライトのJSONファイルは、ここからダウンロードできます。
P23_20221015(10).json
ジャッジ練習
フライトコーチ・ジャッジの映像です画像
moon様


詳細な実験データをご報告頂き、ありがとうございました。画像を拝見しますと、45度傾斜の方がNSatsの値も全体的に大きいようですし、それぞれの誤差の値も小さく見えます。moon様のご賢察の通り結果が出ているように思えますが、如何でしょうか。45度傾斜の効果が期待されます。
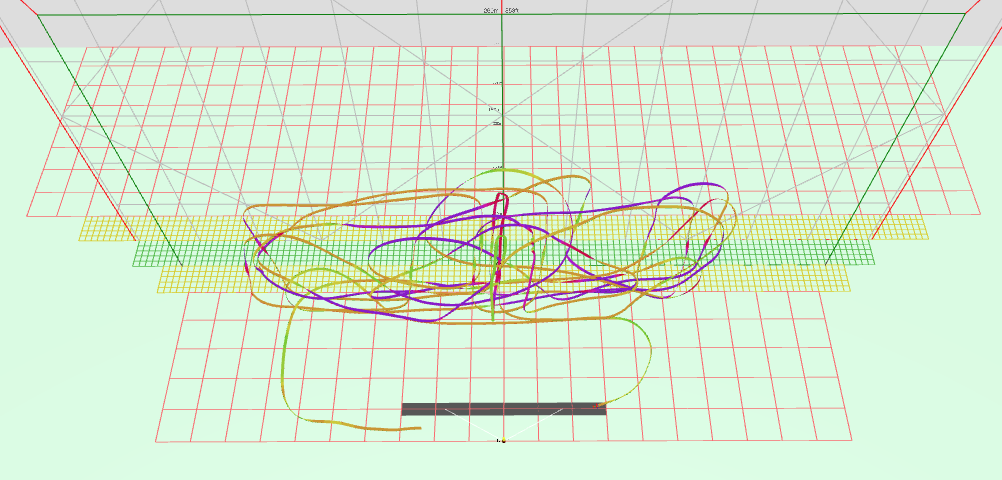
私の方でも衛星の捕捉数が少なくなる原因を更に探ってみました。下図は、以前別のトピックで報告致しましたKMZファイル作成プログラムを用いて、P-23のLOGファイルのPOS位置データをKMZ形式に変換し、Google Earth上に表示させたものです。図中には、NSatsが12以下となる位置(ArduPilotでは12以上が推奨値)も黄色いピンで表示させました。
この図ですと、込み入っていて分かり難いので、トライアングルのみ抜き出して表示させたものが下図です。
この図を見ますと、機体姿勢が背面の時にNSatsが12以下になる割合が多いように思います。他のマヌーバも調べた結果、機体姿勢が垂直あるいは背面の場合にNSatsの値が小さくなるように思われます。機械学習で得られた結果と同様な結果となりました。もう少し他のフライトデータも調べてみたいと思います。
パターンフライトは、飛行機を上手に飛ばすテクニックはもちろん大切ですが、決められた通りに飛んでいるかが大事になります。
飛行の判定は、そういったパターンフライトを知る上でとても役に立つ事なのですが、最初から点数を付けるのは難しいですね。
そこで、これは昔、大会前の審査員実習で教わった事なのですが、こんな感じでやってみてはどうでしょう。
1) まず他の事は無視してラインだけに注目し、ラインの異常の数を数える。
2) 次は、R(曲線部)だけに注目して、異常の数を数える。
3) 仕上げは通常通りの判定
というものです。
何だそんな事、と思われるかもしれませんが、1つ1つのパーツごとに見るという点では役に立つと思います。
是非、FCジャッジで試してみてください。
1)のラインについて、
初めと終わりが分かりますか?
角度や長さは問題無いですか?
こんな感じで1つ1つやっていくと、何か見えて来るものがあるはずです。
ビデオ制作に苦労されたと思います。
プロッタとジャッジを同時に二画面で見られることに驚きました、素晴らしいですね。
二画面を見て、ジャッジはポリゴン処理されたように、実際のフライトを細かく再現しているように思いました。
denkado様のいつものフライトそのままです。
見たとおりに見事に再現されています。
対してプロッタは、リボンの航跡のためか現実感から少し離れてしまいます。
それだけジャッジの再現性が優秀なのかもしれません。
本題ですが、採点は経験が無ければ難しく早く自動採点になってくれればと思います。
TakJP様 多岐にわたる情報ありがとうございます。
GPSアンテナとコンパス付き基板を分離(最下段に詳細記述)し、再チャレンジしました。
結論から、
母体数が少ないため、45度傾斜での衛星捕捉数の平均化の効果は継続調査します。
良い感じです、まずは最初の比較結果です。
以下の感想は、私見を含みますのでご容赦ください。
5フライトしました、すべてジャンプは無くOKです。
GPSアンテナを45度傾斜と水平に配置したP23フライトの各5例の比較です。
水平は前日データ取得、45度傾斜は今日のデータです。
両日ともにスマホによる衛星チェック結果は42~45程度の衛星捕捉数、ほぼ同条件と思います。
45度傾斜したものは、
衛星捕捉数(NSats)は水平時と同等、最低値が少し高い感じがする。
水平方向の精度(HDop)は同等か数値が大き目にでるので精度は少し低下するように見えます。
カルマンフィルタによる推定値とセンサーからの算出値を比較した誤差について、
45度傾斜したものは、
位置エラー(XKF4_SP)は水平時とほぼ同等です。
コンパスエラー(XKF4_SM)は平均値、最大値が小さ目に出ます。
速度エラー(XKF4_SV)に大きな差が出ます。平均値、最大値共に小さく、水平に比べて最大値は1/2~1/15の値です。、5フライト全て最大値0.5以下です。
比較の一例です。
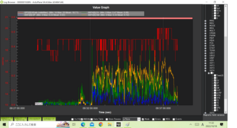
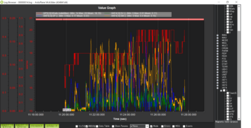
データを添付します。上が45度傾斜のもの、下が水平時のものです。
衛星捕捉数(NSats) : 14~18.71~20 @45度傾斜、14~18.15~20 @ 水平
水平方向の精度(HDop) : 0.65~0.68~0.8 @45度傾斜、0.59~0.64~0.74 @ 水平
下記の閾値は0.6です。
位置エラー(XKF4_SP) : 0~0.03~0.24 @45度傾斜、 0~0.03 ~0.17@ 水平
コンパスエラー(XKF4_SM) : 0~0.12~0.34 @45度傾斜、 0~0.15~0.40@ 水平
速度エラー(XKF4_SV) : 0~0.08~0.47 @45度傾斜、 0~0.11~0.91 @ 水平
<手持ちGPSの改造>
使用GPSはケース入りGPSをケースを外し使用していたものです。
GPSアンテナ(セラミックの四角い茶色)はコンパス基板と一体型のため、アンテナと基板との半田付けと接着部を剥がして分離型に変えました。
BN-880であれば、両面テープによりアンテナと基板が接着されているのみです。
半田を外す必要はなく簡単にできると思います。自己責任でお願いします。
実際に点数を付けてみました。
これがその動画です。
ジャッジ画面には補助線などがあって、それはそれで参考になるのですが、所詮モニター画面なので情報は限られています。
肉眼の様な遠近感や臨場感までは分かりません。
そのため、ジャッジ画面だけでは採点が甘くなってしまいます。
そこで、今回は動画の様に、リボン図を補助に使ってみました。
ジャッジ画面で分かり難かった事をリボン図で確認する様な感じです。
その結果、まあ納得できる数字にする事ができました。
これが、リボン図や、そこにある機体の拡大画像だけを使って、原則通り採点すれば、みんな酷い点数になってしまうでしょうから、現実的には仕方のない事でしょう。
採点には、0〜10点でその演技を評価する、バランス感覚も必要なのです。
人間が評価する場合、もちろん個人差があって、それはそれで構わないのですが、朝から晩までその基準が一定かと言うと、それは中々難しいでしょう。
そんな事からも、機械による判定は必要と思うのです。
その機械による判定ですが、当然研究が進んでいる様で、聞くところによると、
機体やパイロットによって目標とするフライトは違うので、瞬時にそのフライト用のテンプレートを作ってそれを基準に採点する様な事も考えているらしいです。
まぁ、どんな形で実際に登場するのかは分かりませんが、楽しみなところです。
moon様
早速実験して頂き、ありがとうございました。ご指摘の通り一体型の場合難しそうですね。
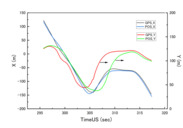
ところで、LOGファイルを眺めていたところ、下図のようにジャンプが発生しなくても衛星捕捉数が少なくなるとGPSの位置情報とカルマンフィルターによる位置の推定値POS( = JSONファイルの位置情報)にずれが生じています。
これらをPlotterで用いているPilot座標(原点がPilot位置)に変換してみますと、下図のようになります。
X軸がPilotから見て右方向、Y軸が前方です。X方向は両者に違いは無いのですが、Y方向は大きく異なっています。つまり、同じ時刻では前後方向に大きいところで数十mずれています。実際のところ、カルマンフィルターによる推定値、つまりリボン図の方がGPSの値よりも正しいと思われますが、いずれにしてもジャンプが無い場合でも衛星の捕捉数が少ない場合には注意した方が良さそうですね。
GPSを45度傾斜し取りつけた際の写真です。
今日のフライト結果は惨敗でした。
GPSを5回の全てのフライトで大きなジャンプ出まくり、ミッションプランナー解析ではコンパスエラーが表示されていました。
思慮不足でした。
少し時間は掛かりますが、このコンパスエラーを対策して再度の検討を行う予定です。
GPS内蔵の電子コンパスは向きだけ注意すればよく、傾斜をつけてもOKと考えていましたが、傾斜補正機能付きではないようです。
使用したGPSは、コンパス基板と一体型のためGPSアンテナを45度傾斜するとコンパス基板まで45度傾斜します。
コンパスは水平に置くのがmustのようです。
今回のP23フライト時のデータ比較です。
最初の数字は45度傾斜時のもの、二番目の数値は水平に再度置いた際のジャンプ無しの今日のデータです。
各々一例のみデータです。
45度傾斜の場合、
衛星捕捉数は、やや低下するように見える。
水平方向の精度(捕捉数)は、水平より低下傾向に見える。
衛星捕捉数(NSats) : 7~17 @45度傾斜、 11~18 @ 水平
水平方向の精度(HDop) : 0.6~1.5 @45度傾斜、 0.65~0.95 @ 水平
<ご参考まで>
下記数値は、推定値とセンサーからの算出値を比較し誤差を示したものと考えます。
GPS 45度傾斜したデータは、コンパスエラーのため各数値が大きく頻度も多く出ています。
閾値は0.6以上、閾値オーバーが継続するとジャンプするようです。
45度傾斜の場合、
当然ながらコンパスエラーは大きい。
位置エラーは、GPS捕捉数が低下したため、各演技ごとに大きめに出ている。
速度エラーも、GPS捕捉数が低下したため、各演技ごとに大きめに出ている。
位置エラー(XKF4_SP) : 0~0.9 @45度傾斜、 0~0.3 @ 水平
コンパスエラー(XKF4_SM) : 0~2.0 @45度傾斜、 0~0.5 @ 水平
速度エラー(XKF4_SV) : 0~7.0 @45度傾斜、 0~2.4 @ 水平
moon様
早速、私の稚拙な解析をご検討頂き、ありがとうございました。
私もmoon様同様ジャンプ現象を無くしたいと考えています。特に演技のやり直しができないような状況、例えば競技会などでのFlight Coachの使用を考えると、ジャンプ現象の発生は許されません。私は次の2点を目的に、これまでジャンプの解析を行ってきました。
1.そもそもジャンプが発生しないような方策を考える。
2.もしジャンプが発生してしまった場合でも得られたデータを修正することによって、そのジャンプをリボン図から取り除くことができるような方策を考える。
まだまだ道半ばですが、以前に比べると少しですがジャンプの発生状況やある特定の条件でのJSONファイルにおけるジャンプの修正方法が分かってきました。ジャンプ現象を無くす対策について、もう少しもがいてみようと思います。
さて、今回moon様よりご提案頂きましたジャンプ現象の発生を少なくする対策についてですが、妙案かと思います。確かに、背面での45度降下時は衛星捕捉数が少なくなると予想されますが、GPSからのデータ取得は5Hzですので短時間であれば問題ないように思います。GPSアンテナがもう少し小さくなれば、GPSアンテナを配置を変えて複数個設置するような方法もあるかもしれません。
Ardupilotにとってはそもそも機体姿勢が垂直や背面になることは想定外と思われますので、カルマンフィルターによる推定方法のアルゴリズムを修正する必要があるのかもしれませんが、これらは私にはハードルが高すぎます。
それでは、moon様もし実験結果が得られましたらお知らせ頂ければ幸いです。
ジャンプ現象の解析を拝読しました。
素晴らしい解析ありがとうございました。
この頃は私の装置ではジャンプが見られず、ほぼ100% OKです。
下側水平ラインを可能な限り高い位置(50m以上)で飛ばすように心掛けているのみです。
しかしながら、他の方は前とは違う位置、正面での上昇時に発生しやすい、ジャンプ現象は依然として出ます。
新アプリのジャッジでの自身のフライト再現もできるようになりました。
この素晴らしい新アプリを有効利用するためにも、ジャンプ現象を抑制できるようになれば最高です。
TakJP様の解析結果の背面、上昇、降下時の衛星捕捉数がこの現象に影響しているのは何となく感じていました。
データからも実証されたのでスッキリしました。
GPSのアンテナの配置を水平線から45度(垂直尾翼の前縁と平行)傾けて配置すると、水平、背面、上昇、降下時の衛星捕捉数の平均化が図れると思うのですが、単純な考えです。如何でしょうか。
この場合、衛星捕捉数が最も少ないと予想されるのは背面での45度降下と考えます。
明日から実験してみようと思います。
現状ではジャンプ現象の発生がないのでミッションプランナーの解析から違いを見てみます。
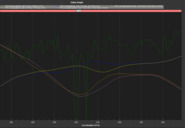
前報に引き続き、ロール角のジャンプへの影響を調べてみました。前報で、リボン図のジャンプに対してGPS衛星の捕捉数を表すNSatsの影響が大きいことが分かっていますので、今回はNSatsとRollの関係を機械学習を用いて調べてみました。なお、Roll(機体のロール軸回りの傾きで水平から右回りを正とし、単位は度。-180 <= Roll <= +180)の正負がNSatsに与える影響に違いは無いと考えられますので、今回はRollの絶対値を用いています。PitchのNSatsに与える影響は前報でやや大きいことが分かっていますので、今回はPitchが正のデータ(機体姿勢は水平から上向き)のみ用いています。下図は、各パラメータ間の相関の大きさを表しています。

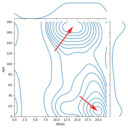
前報で報告したように、NSatsに関してHDop及びHAccに強い負の相関があることが分かります。また、Pitchにもやや強い負の相関があります。さらに、今回Rollにもやや強い負の相関があることが分かりました(白い矢印)。そこで、NSatsとRoll間の関係をデータ数の等高線図を用いて調べました。下図はその解析結果を表しています。
Rollが0に近いとき(機体姿勢が正面)、データ数のピークはNSatsが20の領域にありますが、Rollが180に近いとき(機体姿勢が背面)は、データ数のピークはNSatsが13, 14の領域になります(赤い矢印)。したがって、機体姿勢が背面になると、衛星の捕捉数が減少することになります。衛星の補足数は12以上あることが推奨されています。また、GPSデータの取得は0.2秒毎に行われていますので、背面のまま数秒間飛行を続けるとジャンプが発生する可能性が高くなると考えられます。なお、今回の解析に用いたデータ数は約6,500で、全てP-23のフライトデータです。
今回は、機械学習を用いてロール角のジャンプへの影響を調べてみました。本解析結果はデータ取得に用いた機体特有の問題かも知れません。皆さんのフライトデータでもご確認頂ければ幸いです。
画像だと、グリッド線があったり、スピードを変えたりで、色々な事が分かるのですが、
人間の目では、全体の形というより、その瞬間瞬間の動きで判断されるのは仕方のない事ですね。
現在の採点方法も、おかしなところがあったら減点して行くという方式で、全体の形を見てから点をつけるものでは無いのです。
この「ジャッジ用プロッター」には採点画面があるので、自分で採点の練習をしてみると良いです。
ちょっと変だと思ったらマイナス0.5点。
明らかなミスがあったらその度合いによって、マイナス1点〜2点〜3点という感じで。
さて、公平な判定がどれだけ出来るでしょうか。
誰かがこのジャッジ役をやらなければ、競技は成り立たないのです。
やっと娑婆に戻ってこれ、少しずつ模型をいじる元気も出てたので、



しばらく放ってあったAKK_F4_Support_SD_Card(FC)+BN-880の設定を
再開することに。前回はBN-880のコンパスがミッションプランナーで見えて
なく、プルアップ抵抗が必要と言うところで終わっていたと思います。
そこでBN-880のSDAとVCC間、VCCとSCL間に2.2KΩの抵抗を入れたところ
見事ミッションプランナーからコンパスが見えるようになりました。
今回、FCにはコンパスがないため、BN-880だけを持ってコンパス
キャリブレーションを行ったところ何度やっても終了せず、FCとBN-880を
板に固定して実施したら1発で成功しました。
あとは3Dプリンタでケースを作ってみたいと思います。
自分の飛行が3Dで見られるのは感動です。が演技の形を確認するのは困難かな?
そうですね。
新しいプロッターです。
トピックの冒頭部分が解りにくかったので、手直ししておきました。
こんな凄い機能がどんどん出て来るのですから、使わなければ損ですね。
それと、この画面はジャッジの練習用でもあります。
ただ、人間の目なんて、この画像の様に、ある一面を見ているだけで、しかも瞬間的に判断しなければならないので、
どこまで正確で公平にできるかは微妙なところがありますね。
新機能、どうやって使うの?ってPlight Plotterをいじりまくってしまいました(^^;
新たなURLで起動するのですね(^^)
https://flightcoach.org/judge/plotter.html
P23のサンプル動画をアップしました。
昨夜開こうとしたらエラーが出て見れませんでした。
FCJudgeは version 1.3 のJSONファイルじゃないと見れないんですね。
フライトコーチのHPにも書いてありましたが気が付きませんでした。
MORRISさんがおっしゃるようにセーブし直したら見れるようになりました。
P-23出来なくてもスポーツマンとか普通のフライトでも見れるのでありがたいです。
ありがとうございました。
IMACのフライトもアップされてます。
確かに、
古いJSONファイルを開こうとすると警告が出てしまいますね。
Save JSONボタンでセーブし直したら見られる様になりました。
MORRISさん、書き込みありがとうございました。
優秀なカメラマンに自分のフライトを撮ってもらっている様で、とってもいいですね。
今回の動画は最近のフライトのJSONファイルだったので、何も違和感は無かったのですが、古いのは気をつけてみます。
再生したら、まるで飛行場のお立ち台で見ているようで、ちょっと感動しました。
なお、最新版のJSONファイルにセーブし直さないと読み込んでくれないようですね。
カリフォルニアの方のF23パターンです。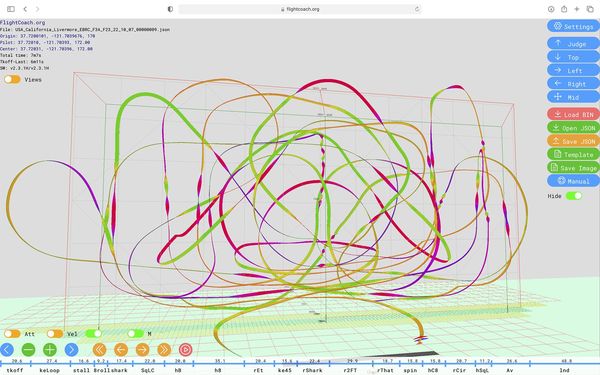
了解を得てアップしておきます。
MK_F25↓
11月30日までに「json」ファイルを提出とあります。
「bin」ファイルでは無いんですね。
「json」ファイルは飛行場の情報を入力する必要が無いので、フライトコーチのマップに登録してない飛行場でのフライトでも、大丈夫という事になります。
Air Craft YuGaの有我さんにリンクのお願いをしたら、早々と登録してもらえました。
福島の飛行場は日本選手権が開催されるだけの事はあって、フライトコーチのMapにもしっかりと載ってます。
ついでに世界の登録飛行場を見てみると、アメリカが結構多くなっています。
フランスは数は少ないですが、ヨーロッパ選手権が開かれる様な大きな飛行場が登録されてます。
日本は変わらずで、ちょっと出遅れて寂しい感じですね。
時代が変わりつつあります。
もちろん、実際の競技会で急激な変化は無いでしょうが、何年か先どうなっているかは誰にも分かりません。
Imai↓
クロス↓
MK_F23↓
Seb_F23↓
ファーストP23↓
hgさん、情報ありがとうございます。
私の場合、MacでSafariを使っているので、最初の投稿の様になりました。
今は次から次と新しくて良いものが出て来るので、情報収集と選択が大切ですね。
私はDeepLのChrome拡張機能を使ってます。
Webページを開きテキストを選択するとDeepLのアイコンが出てくるのでクリックすると翻訳できます。
しっくりこないときはChrome翻訳と比較しながら使ってます。
ちなみにこのページを翻訳するとChromeとちょっと違ってますね。
こんにちは
廉価で入手でき、フライトコーチに適応できるFCやGPSの情報が増えていくと
予算的に厳しい状況でもフライトコーチを利用できるので嬉しいです。
今後もよろしくお願い致します。
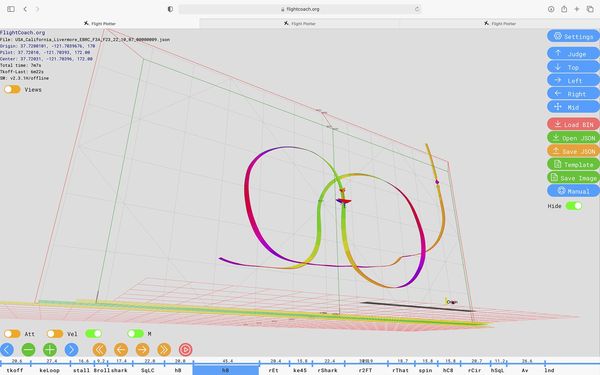
soramonさんが教えてくれた裏技の件について、もう少し説明してみます。
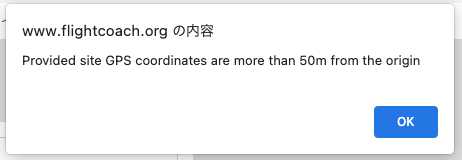
データが入っているはずなのに「オリジンが50m以上離れている」と表示され、画面の「OK」を押すと選択画面も消えて、それ以上進めなくなる事があります。
そんな時の対策については、プロッターの青ボタンManualの中にある「Errors」に少しだけ記載がありました。
その方法ですが、
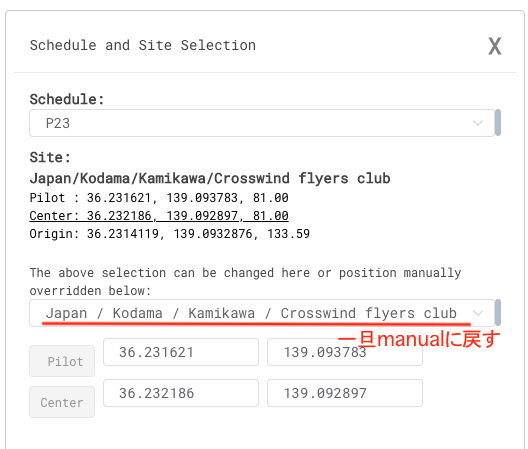
そんな時はもう一度同じBINファイルを開いて、選択画面の飛行場の場所を一旦manualに戻すのです。
manualに変更したら、Copy Originを押します。
すると、パイロットとセンターまですべてがオリジンと同じ座標となります。
そこでSubmitを押すと、この様なリボン図が登場します。
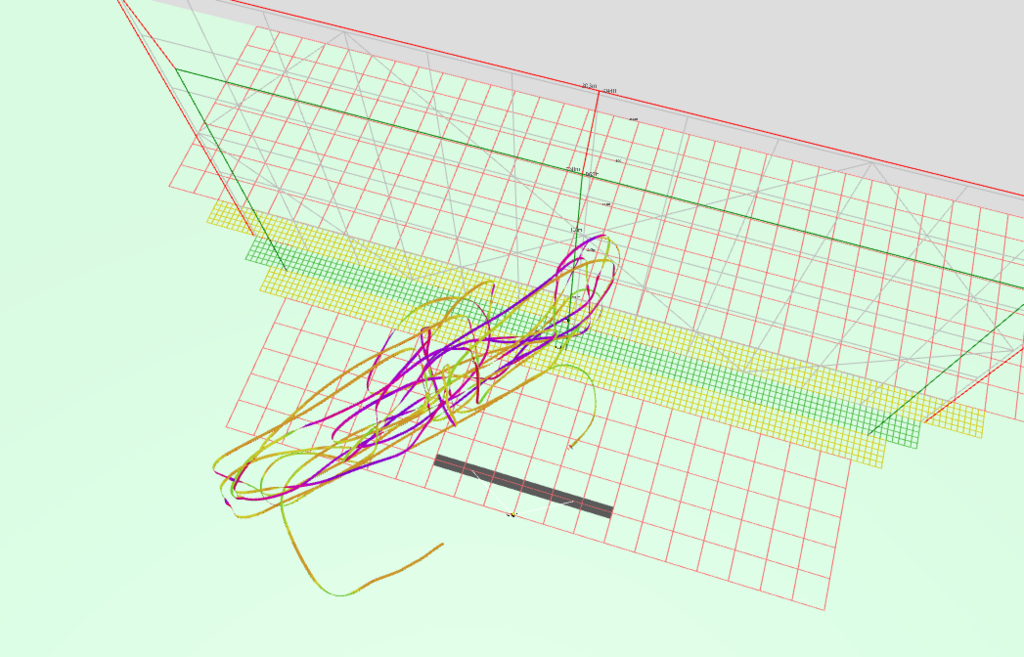
飛行場の方角が指定されていないので、暫定的に南北方向の飛行面となっていますが、
ここまでが、フライトコーチのサイトに載っていた方法になります。
このままでも一応リボン図は見られますが、飛行場の方角を指定してやれば、誤認識したオリジンなりの飛行面が再現できる事になります。
ここからが、soramonさんが教えてくれた方法になります。
センター位置の座標をマップで調べ入力します。
すると、こんな修正画面が再現される事になるのです。
これによって、これまで見られなかったフライトが再生できる様になります。
ただ、飛行場登録していない場所では、次回のBINファイル開示時に座標を入れ直すことになるので、
飛行場所の緯度経度のデータはいつでも見られる様にしておいてください。
パスファインダーをお借りして使ってみました。
当然、テスト済みなので問題無く利用できました。
写真はブログ↓の方にもアップしてあります。
パスファインダー(フライトコーチ)
重量は、写真状態(台座やケーブル込み)で57g

Precision Black Box (Flight Coach) Turn Keyの9/29時点の在庫は3ケでした。
denkado様情報で確認した所10/2現在の在庫は1ケのみとなっています。
ほんの少量ですが、徐々には売れているようです。