飛行データの解析、ありがとうございました。 衛星捕捉数が明らかに違っていたのですね。 対応策が上手くいくといいのですが、手がかかりそうですね。
TakJP様 別トピックの[ebayからのPathFinder名称のフライトコーチ]にTakJP様の本トピックの情報を使用させて頂きました。 衛星捕捉不足はプロッタ上においてスライド現象を生じさせていました。 その解析です。 https://zawazawa.jp/flightcoach/topic/22
なるほど。そうだったのですね。
PathFinder使用時のスライド現象について解析しました。 長文です、御容赦を願います。 本日の飛行場でのdenkado様からの解析依頼、内容はプロッタでの再生画面でP23の背面からのインメルマンターン時の上昇がおかしい、、、スライドしている。 この現象は、インメルマンターン以外にも垂直上昇時に発生するとのこと。
今回の現象、ロール後の背面からのインメルマンターンにおいて直線からのハーフループ上昇時に奥行方向に明らかにスライドしています。プロッタ再生画面においても動きが変です。 プロッタ画面です。 上は、ジャッジビュー 下は、レフトビューです。
結論: ParhFinderは衛星捕捉能力が不足しているようです。 その結果として、推定計算結果にエラーが大きく、精度も取れないことが引き金になりスライド現象を発生しています。 本日、同時間帯に飛ばした私のP23フライトでの衛星捕捉数と比べました。 明らかにParhfinderでの衛星捕捉数は不足気味です。両者での2回目のフライトも確認しましたが同様でした。下記に結果を示します。
ミッションプランナーで解析結果です。 左がParhFinder(PF)、右がジャンプ等の異常はない私のフライトコーチ(F.C)です。 使用機材、飛行機体、フライトコントローラ+GPSはほぼ同じものです。
別トピックスの [機械学習によるジャンプに影響を与えるパラメータの分析]のTakJP様の情報から https://zawazawa.jp/flightcoach/topic/28
衛星捕捉数(NSats)は12以上、水平方向の精度(HDop)は小さいほど良い。 PFでの衛星捕捉数は最低が僅か10です。平均値も低いレベルです。 精度の数値も大きめに出ます。
衛星捕捉数(NSats) :10~16.25~19 @PF、16~18.85~19 @ F.C 水平方向の精度(HDop) : 0.65~0.71~1.1 @ PF、0.65~0.65~0.73@ F.C
下記閾値は0.6以下です。 PFは各エラーが大きめの値です。 PFのコンパスエラーが0.6以上を継続した時点からスライドを開始しています。 位置エラー(XKF4_SP) : 0~0.05~0.89 @ PF、 0~0.05 ~0.23@ F.C コンパスエラー(XKF4_SM): 0~0.20~1.86 @ PF、 0~0.19~0.44@ F.C 速度エラー(XKF4_SV) : 0~0.15~6.01 @ PF、 0~0.12~0.49 @ F.C
今回のインメルマンターンでのスライドは、 衛星捕捉数が限界の11~12個のところで生じています。その際の、GPS高度と計算による高度は著しく違っています。
上図は、ParhFinderでの衛星捕捉数 下図は、ParhFinderでのGPS(GPS_Alt)と計算(POS_Alt)での高度比較を一例として示します。
対策: 今後、GPSの置き場所を変更して捕捉数アップに繋がるか検討予定です。 PathFinderはGPSアンテナに対し同程度の高さのフライトコントローラの基板が横方向に近接しすぎることが原因と思われます。電子基板は金属のパターンで覆われ、電子部品も殆どが導電性です。 金属ですので衛星捕捉に影響を与えるます。 このため、背面飛行時において水平方向の衛星を捕捉するのにフライトコントローラ基板側の一面は衛星捕捉が抑制されてしまい捕捉数の不足が生じたものと推定できます。 水平飛行等のGPSが上を向いている場合は問題ありませんが、P23等の背面飛行の時間が長くかかる場合は要注意です。背面時に四方から受信したいのに、両者が近接すると三方からの水平方向の衛星からしか受信できません。
さらに、フライトコントローラ自身はクロック等による多数の高周波スイッチングノイズを発生します。言い換えれば、GPS受信、特にGPS内蔵のコンパスに影響を与えることは十分に考えられます。フライトコントローラ内にあるコンパスの使用を推奨しないのもこの理由と思われます。
ご参考: 私は当初からGPSとフライトコントローラの配置は基板一枚分の間隔を置くようにしています。例外として、フライトコントローラ上にGPSを配置したタイプもあります。この場合においても衛星受信を妨げることにはなりませんので衛星捕捉問題は生じていません。
赤いLED点滅はGPS受信FIXの表示だそうです。
今度は、私のMusetteと比べてみました。
そのまま使えるならいいですね。 情報ありがとうございます。 機器によって少し結果が異なる様な感じもするので、ちょっと気にかけてみてください。
5台とも飛行試験したところ、数回の飛行で全て問題なく動作するようになりました。 いばらく5Vレギュレータを経由してつないだままにすると、GPSアンテナの ところの赤いLEDが点滅します、理由は不明ですが異状なしです。 キャリブレーションも何もやってません、そのまま搭載しただけです。
私用に購入したものは5セル(20V)から電源がとれうように改造してあったの ですが、それが原因かは分かりませんけどGPSがかなり高温になり電波を受信し なくなりました。後日GPS部分だけ修理しよかと考えています。
Originは電源を入れた場所です。位置を忘れない様にしましょう。 私はそれもあって、毎回パイロット近くで電源オンとしています。 それと、車の近くでは受信障害が出る可能性もあるので、なるべく車から離れましょう。
moon様 コメントを頂き、ありがとうございました。 Flight Coachを機外に出した効果については、私も驚きました。やはり、GPSの測定エラーに対してカーボン樹脂の電波遮断の影響が大きいと推測しています。 私には機体の工作技術がありませんので、Flight Coachをどのように搭載するか、は悩ましいところです。 なお、以前の投稿の中で、GPS衛星の捕捉数NSatsを"12以下"と記述したのは"12未満"の誤りですので、訂正させて頂きます。
ありがとうございます。 SettingsでOriginの位置を調整すれば良かったのですね。
TakJP様 確認試験ありがとうございました。 捕捉数、精度、およびエラーの違いに驚きました。 紛失、機体へのダメージが無いようで良かったです。フライトコーチのPixhawk4 mini+M8N GPSはフライトコーチ製作のお手本となっているものです。非常に高価ですが、CPUはじめ、各種センサ、当然GPSも一級品を使用していますので性能は群を抜いています。大事な機体と入手困難なフライトコーチ機材ですので無理をしないようにお願いします。
異常は無い様にも見えますが、Originの位置がもう少し良く見えるトップビュー画像が欲しいです。 Originのズレは出るものなので、気になる時はSettingsを開いて位置調整をします。
これまでの分析から、GPSによるデータ取得エラーにカーボン樹脂製のキャノピーが関与しているのでは、と推測しました。そこで、下記の写真のようにFlight Coachを機外に出してフライトしてみました。 下図は、従来通りFlight Coachを機内に設置したときのP-23の飛行軌跡をGoogle Earth上に表示したものです。 図中の黄色いピンはGPS衛星の捕捉数NSatsが12未満(ArduPilotは12以上を推奨)となる位置を表しており、ピンのラベルの最初の数字はマヌーバの種類を、2番目の数値は機体姿勢のロール角を示しています。前報で報告しましたように、NSatsが12未満となる回数がかなり多いことが分かります。 下図は、本日Flight Coachを機外に出してフライトした結果です。 曲技内ではNSatsが12未満になることは一度もありませんでした。次に、GPSの測定精度並びにカルマンフィルターの推定精度を表す各パラメータを調べてみました。結果は下記の通りとなっています。 【機内GPS】 NSats: 0(min.)~15.54(average)~19(max.) HDop: 0.59~1.44~99.99 XKF4_SV: 0.01~1.05~15.63 XKF4_SP: 0~0.14~1.45 XKF4_SM: 0~0.21~0.46 【機外GPS】 NSats: 12(min.)~19.99(average)~23(max.) HDop: 0.51~0.57~0.80 XKF4_SV: 0.01~0.13~2.70 XKF4_SP: 0~0.06~0.57 XKF4_SM: 0~0.24~0.43 このように、Flight Coachを機外に出した場合、NSatsが12未満、並びにHDopが2以上(ArduPilotは2未満を推奨)になることは一度もありませんでした。このデータを見る限り、Flight Coachを機外に出すことにより、GPSのデータ取得状況がかなり改善されたことが分かりました。その理由として、 1.Flight Coachがモーターやバッテリーから離れたことによりノイズが低減された。 2.Flight Coachを機外に出すことにより、キャノピーやその他カーボン樹脂による電波遮断の影響が低減された。 などが挙げられます。このどちらが、あるいはこの両者がGPS状況の改善に寄与したかは現状では不明ですが、いずれにしてもFlight Coachを機外に出すことによりGPSのデータ取得状況が大きく改善されることが分かりました。 Flight Coachを機外に出す方策として写真のままですとフライトに影響しそうですので、できれば機体表面に埋め込みたいのですが、既存の機体ですと工作が難しそうです。機体を製作できる方はフライトに影響が出ないように初めからGPSアンテナを入れるスペースを機体表面に設けておくと良いかもしれません。
こんにちは 飛行データをFligth Plotterで表示すると全体的に手前に描画されてしまいます。 これは電源を投入した位置が滑走路の中心から12m程度離れている等が原因なので しょうか? ちょうどOriginマークが出ている位置で電源投入しています。
キャッシュで動くので、オフラインでも大丈夫です。
初めて投稿します。 フライトコーチ導入中です。 プロッター使用についての質問です。 プロッターは、ネット環境のないところで、PCでの使用は、可能なのでしょうか? PCのグーグルクロームのブックマーク登録はしています。 初歩的な質問ですいません。
飛行場にはパソコンを持って行くので大丈夫です。 11月5日の件も了解です。
お世話になります。
一番少ない容量のマイクロSDカードは8GBです。大丈夫でしょうか?
フォーマット形式は解りませんが、小型アクションカメラで初期化しました。
今のところ11月5日を予定しています。
5台注文して、一週間で届いたそうです。 磐田RC掲示板 そのまま使えるらしいので、最近の出荷品は内容が変わったのかどうか。 うまく使える様なら部品不足の中にあっては助かる事です。
TakJP様 将来のリモートIDも同様ですね。 2.4GHz帯ですので受信できない場合は某筋からのお咎めも、発信者責任にならなければ良いのですが。
閑話休題 フライトコーチでのデータの品質確保のため、自己責任において少しずつ電波環境を改善していくしか無いですね。 多くの方が努力すれば、デュアルGPS、デュアル型フライトコーチが将来はできるかも知れません。
改造PathFinderは順調に使用できているのですが、やはりフライトコーチ/タイプ1などと同じ様に、垂直姿勢になった時に時々異常が発生します。 ただ、その異常の表れ方は、ジャンプでは無く、スライドが多いです。
次の動画はその例で、 4:10で「左ヨー」へスリップしていて、これは気付き難いですが、 6:09では明らかな異常が見られます。
ジャンプに比べ、小さなスライドは見つけ難いので、フライトコーチの機種毎の特徴にも注意が必要になります。
このトピック冒頭にあるフライトコーチ/タイプ2は、部品調達ができなくなったため販売終了となります。 誰でも使える、品質の良い製品として組み立てて頂いたのですが、部品が無い事にはどうしようもありません。 今後の事についても未定です。
これからフライトコーチを始められる方は、次のサイトを入手の参考にしてください。
・PROTON CONTROL SYSTEMS ページ右下のeBayでPathFinder(フライトコーチ本体)の販売。 購入後セットアップ等が必要。 GPS捕捉時間は、コールドスタート:2分、ホットスタート:20秒と記載。
・BBSトピックのebayからのPathFinder 名称のフライトコーチ ・磐田RC掲示板 PathFinderの試用開始。 その後5台入荷して説明会も開催予定。
・Precision Black Box (Flight Coach) Turn Key 直ぐに使える状態での販売。在庫0個。(2022.10.19更新)
moon様 以前、舵を切ったときの挙動に違和感を感じることが何回かありました。その原因につきましては、ネットでもいろいろと言われていますように、良く分かっておりません。現在は、フタバ製のデュアルRXリンクシステムを使用しています。このシステムを使用してからは、特に違和感を感じることはございません。
TakJP様
スマートキーの電波遮断用盗難防止ケースにも使用されています。 カーボンはある意味では要注意です。 例えば 1面でも4面でもカーボンで囲まれた場合の全方位での電波障害の懸念は絶大です。 さらに指向性の強い2.4GHz帯の受信機でも同様と考えます。 皆様どのように対応しているのでしょうか。
moon様 カーボン樹脂の情報を頂き、ありがとうございました。カーボン樹脂の電波遮断率は90%以上とのこと、ほとんどの電波が遮断されてしまいますね。F3Aフルサイズ機では、多くの機体はキャノピーのみならずモーター周りやスピナー、プロペラに至るまでカーボン樹脂が使用されていますので、特に垂直に近い上向き姿勢の際は注意が必要ですね。スライドやジャンプが無い場合でも、GPSの衛星捕捉数が12以下になる場合は、HDop, VDop, XKF4などのGPSの測定精度やカルマンフィルターの推定精度を示す数値に注意する必要があります。
機材の情報ありがとうございます。 ジャンプは、気象状況等により電波捕捉が十分でない時にたまに発生することがあります。 電波障害等の外的要因がない場合、以下のことが考えられます。 自作した物であれば、次のことが考えられます。
機材の設定について、 1、 GPSのサンプリングの転送スピードとレート設定がされているか。 2、 コンパスの設定はGPS側のコンパスのみ使用する設定になっているか。 3、 コンパス等のキャリブレーションは実施されているか。
もし、上記設定と外的要因に問題ない場合は、
ミッションプランナのソフトを使用してある程度の解析が可能です。 ミッションプランナにてフライト・データの画面で左側中央部にある小さい→でデータ・フラッシュ・ログを選択します。Pix4 Bin File to Logを選択し、フライトしたBin Fileを指定します。自動的にLog Fileに変換されます。 その後、同画面のログのレビューを選択し、先程のLog Fileを指定します。 解析画面になります。 右側に各種項目がありますので、以下を選択します。
GPSのところで、下記にチェックを入れます。 衛星捕捉数(NSats)
XKF4のところで、下記にチェックを入れます。 下記閾値は0.6です。 位置エラー(XKF4_SP) コンパスエラー(XKF4_SM) 速度エラー(XKF4_SV)
上記の解析結果がでたものを、このBBSにアップを頂ければと思います。
ミュゼットならカーボンの影響は無いですね。 後は、飛行環境で、例えば飛行空域が水の上とか。
denkadoさん、moonさん
アドバイスありがとうございます。
当方、Pixhawk mini + 付属のM8N を使用しております。 機体はミュゼット、FCなどはキャノピー下に搭載しています。
周囲に木陰などはないのですが、あらためて周囲の状況を確認した上で試してみたいと思います。
ジャンプ対策に苦労されているようですね。
ジャンプ現象を防止するのに待機時間2時間は異常と思います。 可能であれば使用機材をお教えいただけないでしょうか。 フライトコントローラ、GPS、飛行機名です。
ご質問の待機時間が2時間の件ですが、 Li-poバッテリ3セルを電源とした場合、消費電流は概ね多くても100mA弱流れます。 上記の場合には2時間では200mAh程度を消費します。 バッテリ容量が2200mAhを満充電値とすると、2時間後は上記消費量を差し引いた分の2000mAhのLi-po電源容量となります。一割程度の電池容量を消費します。 上記を踏まえて、外部電源にするか、ご使用になる電源を選択されてください。
ところで、2時間も掛けてGPSを待機するのは実用的ではありません。 時間を掛けて行うのは、GPS基板内にある位置データ保持用のバックアップ電源のキャパシタ電池を充電する際のみです。充電してあると一週間ぐらいは前回位置を記憶していますので再度電源を投入しても早ければ十秒程度から遅くても数十秒後に捕捉できるはずです。ただし、衛星電波状況が良い状態です。
上のdenkado様のコメントにもありますが、木陰等に隠れている場合、電波障害になり、その場合は上記の時間は当てはまりません。 GPSの衛星捕捉に要する時間はメーカーで規定されています。 一般的にコールド状態(位置記憶が無し)では2分、ホット状態では数十秒と記載されているはずです。
電源を入れる時、周りに電波障害になる様な物はありませんか? ユーザーさんの中には、ハッチバックの下や車の近くで電源を入れて不具合があった例がありました。
いつも参考にさせていただいております。
私の扱い方に問題があるのか、飛行中にどこかに飛んで(データが)しまうことが多く、パターンすべてが 正確に取得できることがありません。
飛行10分前に電源を入れ、待機させても同様のようです。 私の扱い方に根本的な原因があると思っています。
どなたかの情報で、2時間ほど置いておくと精度が上がったというのを読んだのですが こういう場合は、フライトコントローラーの電源を別電源として小型のバッテリーを 接続したままにしておくのでしょうか。
TakJP様 置き場所は難しそうですね。 現状でのジャンプは物理的な解決方法のみと思います、フライトコーチはカーボンによる電波遮断が発生しないような所に置くのがMUSTとしか言えません。
本日はフライトコーチから離れました。 遠方からミュゼットを持参された方のダイレクトモータ+大口径ぺらの組合せでの全回転域ガバナーESCの設定と飛行確認を行いました。スロットル操作等を加味しパラメータを設定、初回設定値で気に入られフルサイズ並みの落ち着いた大きな演技をこなしていました。風切り音のみの驚きの清音です。ギアーダウン、ベルトダウンに比べるとなんとも心地良く ダイレクトモータに戻してみる予定です。
さて、キャノピー等のカーボン繊維を樹脂で固めたものは導電性があります。 電波を強力に遮断します。 代表メーカーの東レのページです。 釈迦に説法ですが、 GPS衛星電波はほぼ1~1.5GHz帯と思いますので90%以上の電波遮蔽率です。
https://www.plastics.toray/ja/technical/torayca/tec_001.html
2.4GHz帯受信機もカーボンに電波遮断され障害を受けることは周知と思います。
グラスファイバー製であれば問題ないと思いますが、カーボンに遮断された状態でのフライトのログデータは概略は合っているように見えても品質の面では疑問に感じます。 フライトコーチのGPSで万が一受信ができても、品質は低下した電波と思います。 私感ですが、エラーの多いときの再現フライトは少しづつズレが発生、程度が悪い場合はスライド、ジャンプに繋がることが何度もありました。
moon様 詳細なご報告、ありがとうございます。データを拝見しますと、衛星捕捉数、GPS精度共にTop Stage70の方が悪いですね。やはり、カーボンの影響が大きいのでしょうか。F3Aフルサイズ機ではキャノピー以外にもカーボンが使用されていますので、それらの影響も気になります。一番の解決法はGPSアンテナを機外に出す方法かと思いますが、現状のGPSアンテナの大きさではそれも現実的ではないですね。もう少し小さくなれば可能かもしれませんが。 一方、自作の機体であれば、GPSアンテナを入れるスペースを機体表面に予め設けることが可能かもしれませんが、既製品では工作が難しいですね。Flight Coachがもっと普及すれば、GPSアンテナを入れるスペースが予め設けてあるF3Aフルサイズ機が発売されるかもしれませんね。
TakJP様 45度傾斜の優位性、各エラーが低減できることが一番です。 前傾、後傾かは今後検討する予定ですので調査後にお知らせします。
45度傾斜程度では対策不可能なことが、、。 本日、Top Stage70が来ていたので45度傾斜のフライトコーチを重心位置の胴体のバッテリー上部に搭載させて頂きデータを確認しました。仰るとおりカーボンキャノピー内での衛星捕捉が著しく低下することを実感しました。経験したことのない低い衛星捕捉数、カーボン多用のF3Aフルサイズ機では共通の弱点なのかも知れません。GPSアンテナの位置にまで対策が必要とも思えます。 Flight Coach orgの製作記事の搭載位置です。 この例では、キャノピー部を避けて後方の胴体上部のバルサ材部にGPSを取り付けています。
本日飛ばしたミュゼット単葉はジャンプは皆無でしたが、Top Stage70のフライトではジャンプが2カ所で発生しました。垂直降下時と上昇時のロール後に発生しています。 大きいジャンプはハーフ8の垂直降下後からおかしくなり始めロール切返しまで、 小さいジャンプ(ズレ)はETの垂直上昇時のロール後から水平に遷移する時に発生しました。写真を参照ください。
比較データを添付します。
上がTop Stage70(TS)のもの、 衛星捕捉数は最低7まで低下、精度、エラーは2~20倍程度に悪化します。 下がミュゼット単葉(Mu)です。
衛星捕捉数(NSats) : 7~17.08~20 @TS、 17~19.68~20 @ Mu 水平方向の精度(HDop) : 0.56~0.65~1.93 @ TS、 0.56~0.59~0.72@ Mu
下記閾値は0.6です。 位置エラー(XKF4_SP) : 0~0.2~5.43 @ TS、 0~0.03 ~0.21@ Mu コンパスエラー(XKF4_SM) : 0~0.33~2.09 @ TS、 0~0.13~0.37@ Mu 速度エラー(XKF4_SV) : 0~0.42~7.36 @ TS、 0~0.09~0.38 @ Mu
TD_P23
イギリスのThomas DavidさんのP-23フライトです。
moon様 詳細な検討結果を報告頂き、ありがとうございました。衛星捕捉数に関してですが、私のフライトデータで捕捉数12以下が多いのは私の搭載機体特有の問題かもしれません。私が使用している機体のキャノピーはカーボン製です。GPSアンテナは重心のやや後ろに搭載してありますので、特に正面で45度上昇の時、GPSアンテナの真上にカーボン製キャノピーがくる姿勢になりますので電波が届きにくくなるのかもしれません。カーボン製キャノピーを使用している機体では注意する必要がありますね。機会がありましたらカーボン製以外のキャノピーを使用している機体で試してみます。 さて、moon様の実験結果ですが、NSatsの値、XKF4の値のいずれも45度傾斜の優位性を示しています。moon様のご賢察の通り、GPSアンテナとIMUを分離できるFCの場合は、GPSアンテナを45度傾斜させた方が良さそうですね。ところで、45度傾斜は前向きの方が良いのか、あるいは後ろ向きの方が良いのか、どちらでしょうか。私の予想では、演技構成によりそうですね。P-23の場合、垂直下降より垂直上昇の演技時間の方が長いので、P-23の場合は前向きに45度傾斜させた方が良さそうに思えますが。
TakJP様 分かり易いビジュアルな画像、情報をありがとうございます。 場所的なものか、他条件が違うのか、衛星捕捉数12以下の再現ができません。
フライトコーチを2台搭載し、45 度傾斜したものの衛星捕捉数を調査しました。 比較対象のフライトコーチはGPSアンテナが水平配置の従来のものです。
条件: P23を6回フライト、ミュゼット単葉のキャノピー内にフライトコーチを縦列配置とし、3回は45度傾斜のものを後側の定位置とし、前側には比較対象の水平のものを配置。残りの3回は前後を入れ替え配置。 フライトコーチを横列配置での比較が理想ですが、物理的制約から断念しました。
注意: 前側への配置はモータ、ESCに近い(5cm程度の距離)ため、電磁波等による各センサへの干渉度が大きく、特にコンパスのエラーは倍以上になっています。
機体搭載時の写真(前後入れ替えたもの)を参照ください。
本日は晴天、スマホ衛星状況は45~47程度で良好です。
結果は、 45度傾斜したものは、
水平のものに比べて悪化データはありません。 前回同様に衛星捕捉数は高めに出ます。 各エラーも少ない傾向にありジャンプ現象抑制に効果があるようにも思います。
衛星捕捉数(NSats): 前後側の配置にかかわらず最低値、平均値が高めに出る傾向にあり優位。 エクセルに簡単に纏めましたのでデータ参照ください。
位置エラー(XKF4_SP): 優位です。45度傾斜は最大値が0.6オーバーが3フライト、水平のものは0.6オーバーしたものが5フライト、最大値も高めに出る傾向がある。
コンパスエラー(XKF4_SM): 優位です。45度傾斜のものを後側に配置した場合は全フライトで0.36以下、前側に配置した場合は0.75,1.04,1.86が最高値であるが平均値は最大でも0.29と小さい。 水平のものは、配置に関わらず全フライトでの最大値は1.21~4.31と高く、平均値も0.33~0.93と高めに出る。
速度エラー(XKF4_SV): 優位です。45度傾斜のものを後側に配置した場合は全フライトで0.35以下、前側に配置した場合の最高値0.25,0.24,6.36であるが0.6オーバーは1フライトのみ、平均値は最大でも0.1以下と小さい。 水平のものは、配置に関わらず0.6オーバーは3フライト、平均値も0.11~0.14と高めに出る。
前報のGoogle Earthの画面ではNSatsが12以下になるときの機体の姿勢が良くは分かりませんでしたので、画面中に機体姿勢のロール角Roll(機体のロール軸回りの傾きで水平から右回りを正とし、単位は度。-180 <= Roll <= +180)を表示させました。トライアングル・ループのマヌーバを下図に示します。 図中のピンのラベルで、最初の数字がマヌーバの種類を、2番目の数値がRollを表します。前報で報告したとおり、背面に近い姿勢のときにNSatsが12以下になる割合が多いように見えます。 下図はハーフ・スクエアー・ループの場合です。 この場合は、ロール角に関係なくNSatsが12以下になっているように見えます。 このように、垂直姿勢ではロール角に関係なく、また垂直姿勢以外では背面に近い姿勢のときにGPSの衛星捕捉数が12以下になる割合が多いようです。

飛行データの解析、ありがとうございました。
衛星捕捉数が明らかに違っていたのですね。
対応策が上手くいくといいのですが、手がかかりそうですね。
TakJP様
別トピックの[ebayからのPathFinder名称のフライトコーチ]にTakJP様の本トピックの情報を使用させて頂きました。
衛星捕捉不足はプロッタ上においてスライド現象を生じさせていました。
その解析です。
https://zawazawa.jp/flightcoach/topic/22
なるほど。そうだったのですね。
PathFinder使用時のスライド現象について解析しました。
長文です、御容赦を願います。
本日の飛行場でのdenkado様からの解析依頼、内容はプロッタでの再生画面でP23の背面からのインメルマンターン時の上昇がおかしい、、、スライドしている。
この現象は、インメルマンターン以外にも垂直上昇時に発生するとのこと。
今回の現象、ロール後の背面からのインメルマンターンにおいて直線からのハーフループ上昇時に奥行方向に明らかにスライドしています。プロッタ再生画面においても動きが変です。
プロッタ画面です。
上は、ジャッジビュー
下は、レフトビューです。
結論:
ParhFinderは衛星捕捉能力が不足しているようです。
その結果として、推定計算結果にエラーが大きく、精度も取れないことが引き金になりスライド現象を発生しています。
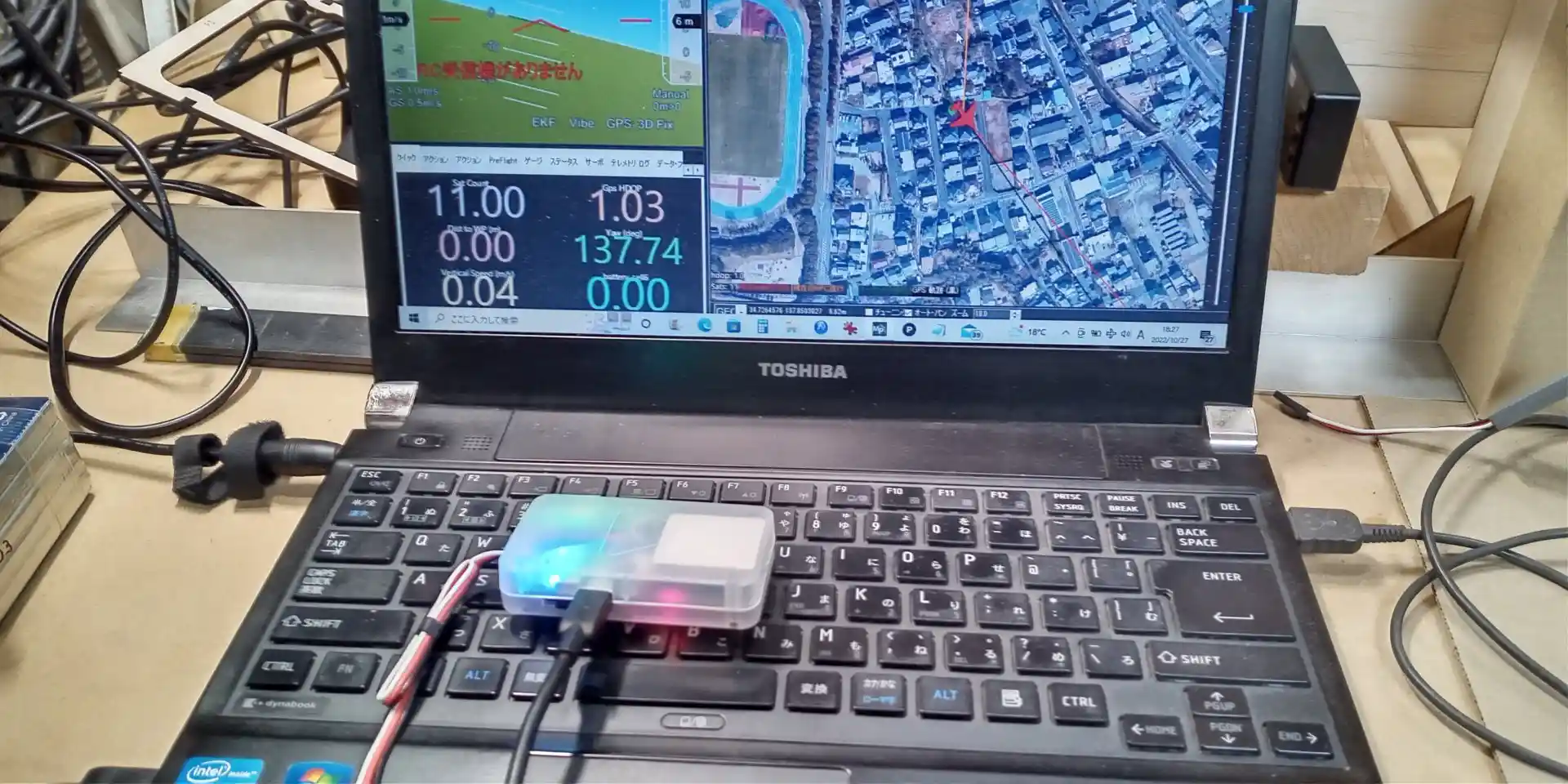
本日、同時間帯に飛ばした私のP23フライトでの衛星捕捉数と比べました。
明らかにParhfinderでの衛星捕捉数は不足気味です。両者での2回目のフライトも確認しましたが同様でした。下記に結果を示します。
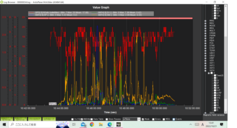
ミッションプランナーで解析結果です。
左がParhFinder(PF)、右がジャンプ等の異常はない私のフライトコーチ(F.C)です。
使用機材、飛行機体、フライトコントローラ+GPSはほぼ同じものです。
別トピックスの
[機械学習によるジャンプに影響を与えるパラメータの分析]のTakJP様の情報から
https://zawazawa.jp/flightcoach/topic/28
衛星捕捉数(NSats)は12以上、水平方向の精度(HDop)は小さいほど良い。
PFでの衛星捕捉数は最低が僅か10です。平均値も低いレベルです。
精度の数値も大きめに出ます。
衛星捕捉数(NSats) :10~16.25~19 @PF、16~18.85~19 @ F.C
水平方向の精度(HDop) : 0.65~0.71~1.1 @ PF、0.65~0.65~0.73@ F.C
下記閾値は0.6以下です。
PFは各エラーが大きめの値です。
PFのコンパスエラーが0.6以上を継続した時点からスライドを開始しています。
位置エラー(XKF4_SP) : 0~0.05~0.89 @ PF、 0~0.05 ~0.23@ F.C
コンパスエラー(XKF4_SM): 0~0.20~1.86 @ PF、 0~0.19~0.44@ F.C
速度エラー(XKF4_SV) : 0~0.15~6.01 @ PF、 0~0.12~0.49 @ F.C
今回のインメルマンターンでのスライドは、
衛星捕捉数が限界の11~12個のところで生じています。その際の、GPS高度と計算による高度は著しく違っています。
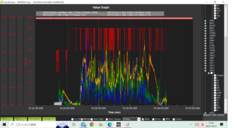
上図は、ParhFinderでの衛星捕捉数

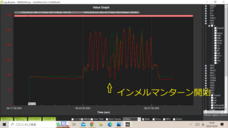
下図は、ParhFinderでのGPS(GPS_Alt)と計算(POS_Alt)での高度比較を一例として示します。
対策:
今後、GPSの置き場所を変更して捕捉数アップに繋がるか検討予定です。
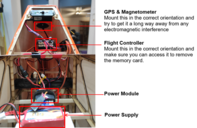
PathFinderはGPSアンテナに対し同程度の高さのフライトコントローラの基板が横方向に近接しすぎることが原因と思われます。電子基板は金属のパターンで覆われ、電子部品も殆どが導電性です。
金属ですので衛星捕捉に影響を与えるます。
このため、背面飛行時において水平方向の衛星を捕捉するのにフライトコントローラ基板側の一面は衛星捕捉が抑制されてしまい捕捉数の不足が生じたものと推定できます。
水平飛行等のGPSが上を向いている場合は問題ありませんが、P23等の背面飛行の時間が長くかかる場合は要注意です。背面時に四方から受信したいのに、両者が近接すると三方からの水平方向の衛星からしか受信できません。
さらに、フライトコントローラ自身はクロック等による多数の高周波スイッチングノイズを発生します。言い換えれば、GPS受信、特にGPS内蔵のコンパスに影響を与えることは十分に考えられます。フライトコントローラ内にあるコンパスの使用を推奨しないのもこの理由と思われます。
ご参考:
私は当初からGPSとフライトコントローラの配置は基板一枚分の間隔を置くようにしています。例外として、フライトコントローラ上にGPSを配置したタイプもあります。この場合においても衛星受信を妨げることにはなりませんので衛星捕捉問題は生じていません。
赤いLED点滅はGPS受信FIXの表示だそうです。
今度は、私のMusetteと比べてみました。
そのまま使えるならいいですね。
情報ありがとうございます。
機器によって少し結果が異なる様な感じもするので、ちょっと気にかけてみてください。
5台とも飛行試験したところ、数回の飛行で全て問題なく動作するようになりました。
いばらく5Vレギュレータを経由してつないだままにすると、GPSアンテナの
ところの赤いLEDが点滅します、理由は不明ですが異状なしです。
キャリブレーションも何もやってません、そのまま搭載しただけです。
私用に購入したものは5セル(20V)から電源がとれうように改造してあったの
ですが、それが原因かは分かりませんけどGPSがかなり高温になり電波を受信し
なくなりました。後日GPS部分だけ修理しよかと考えています。
Originは電源を入れた場所です。位置を忘れない様にしましょう。
私はそれもあって、毎回パイロット近くで電源オンとしています。
それと、車の近くでは受信障害が出る可能性もあるので、なるべく車から離れましょう。
moon様
コメントを頂き、ありがとうございました。
Flight Coachを機外に出した効果については、私も驚きました。やはり、GPSの測定エラーに対してカーボン樹脂の電波遮断の影響が大きいと推測しています。
私には機体の工作技術がありませんので、Flight Coachをどのように搭載するか、は悩ましいところです。
なお、以前の投稿の中で、GPS衛星の捕捉数NSatsを"12以下"と記述したのは"12未満"の誤りですので、訂正させて頂きます。
ありがとうございます。
SettingsでOriginの位置を調整すれば良かったのですね。
TakJP様
確認試験ありがとうございました。
捕捉数、精度、およびエラーの違いに驚きました。
紛失、機体へのダメージが無いようで良かったです。フライトコーチのPixhawk4 mini+M8N GPSはフライトコーチ製作のお手本となっているものです。非常に高価ですが、CPUはじめ、各種センサ、当然GPSも一級品を使用していますので性能は群を抜いています。大事な機体と入手困難なフライトコーチ機材ですので無理をしないようにお願いします。
異常は無い様にも見えますが、Originの位置がもう少し良く見えるトップビュー画像が欲しいです。
Originのズレは出るものなので、気になる時はSettingsを開いて位置調整をします。
これまでの分析から、GPSによるデータ取得エラーにカーボン樹脂製のキャノピーが関与しているのでは、と推測しました。そこで、下記の写真のようにFlight Coachを機外に出してフライトしてみました。

下図は、従来通りFlight Coachを機内に設置したときのP-23の飛行軌跡をGoogle Earth上に表示したものです。
図中の黄色いピンはGPS衛星の捕捉数NSatsが12未満(ArduPilotは12以上を推奨)となる位置を表しており、ピンのラベルの最初の数字はマヌーバの種類を、2番目の数値は機体姿勢のロール角を示しています。前報で報告しましたように、NSatsが12未満となる回数がかなり多いことが分かります。
下図は、本日Flight Coachを機外に出してフライトした結果です。
曲技内ではNSatsが12未満になることは一度もありませんでした。次に、GPSの測定精度並びにカルマンフィルターの推定精度を表す各パラメータを調べてみました。結果は下記の通りとなっています。
【機内GPS】
NSats: 0(min.)~15.54(average)~19(max.)
HDop: 0.59~1.44~99.99
XKF4_SV: 0.01~1.05~15.63
XKF4_SP: 0~0.14~1.45
XKF4_SM: 0~0.21~0.46
【機外GPS】
NSats: 12(min.)~19.99(average)~23(max.)
HDop: 0.51~0.57~0.80
XKF4_SV: 0.01~0.13~2.70
XKF4_SP: 0~0.06~0.57
XKF4_SM: 0~0.24~0.43
このように、Flight Coachを機外に出した場合、NSatsが12未満、並びにHDopが2以上(ArduPilotは2未満を推奨)になることは一度もありませんでした。このデータを見る限り、Flight Coachを機外に出すことにより、GPSのデータ取得状況がかなり改善されたことが分かりました。その理由として、
1.Flight Coachがモーターやバッテリーから離れたことによりノイズが低減された。
2.Flight Coachを機外に出すことにより、キャノピーやその他カーボン樹脂による電波遮断の影響が低減された。
などが挙げられます。このどちらが、あるいはこの両者がGPS状況の改善に寄与したかは現状では不明ですが、いずれにしてもFlight Coachを機外に出すことによりGPSのデータ取得状況が大きく改善されることが分かりました。
Flight Coachを機外に出す方策として写真のままですとフライトに影響しそうですので、できれば機体表面に埋め込みたいのですが、既存の機体ですと工作が難しそうです。機体を製作できる方はフライトに影響が出ないように初めからGPSアンテナを入れるスペースを機体表面に設けておくと良いかもしれません。
こんにちは
飛行データをFligth Plotterで表示すると全体的に手前に描画されてしまいます。
これは電源を投入した位置が滑走路の中心から12m程度離れている等が原因なので
しょうか? ちょうどOriginマークが出ている位置で電源投入しています。
キャッシュで動くので、オフラインでも大丈夫です。
初めて投稿します。
フライトコーチ導入中です。
プロッター使用についての質問です。
プロッターは、ネット環境のないところで、PCでの使用は、可能なのでしょうか?
PCのグーグルクロームのブックマーク登録はしています。
初歩的な質問ですいません。
飛行場にはパソコンを持って行くので大丈夫です。
11月5日の件も了解です。
お世話になります。
一番少ない容量のマイクロSDカードは8GBです。大丈夫でしょうか?
フォーマット形式は解りませんが、小型アクションカメラで初期化しました。
今のところ11月5日を予定しています。
5台注文して、一週間で届いたそうです。
磐田RC掲示板
そのまま使えるらしいので、最近の出荷品は内容が変わったのかどうか。
うまく使える様なら部品不足の中にあっては助かる事です。
TakJP様
将来のリモートIDも同様ですね。
2.4GHz帯ですので受信できない場合は某筋からのお咎めも、発信者責任にならなければ良いのですが。
閑話休題
フライトコーチでのデータの品質確保のため、自己責任において少しずつ電波環境を改善していくしか無いですね。
多くの方が努力すれば、デュアルGPS、デュアル型フライトコーチが将来はできるかも知れません。
改造PathFinderは順調に使用できているのですが、やはりフライトコーチ/タイプ1などと同じ様に、垂直姿勢になった時に時々異常が発生します。
ただ、その異常の表れ方は、ジャンプでは無く、スライドが多いです。
次の動画はその例で、
4:10で「左ヨー」へスリップしていて、これは気付き難いですが、
6:09では明らかな異常が見られます。
ジャンプに比べ、小さなスライドは見つけ難いので、フライトコーチの機種毎の特徴にも注意が必要になります。
このトピック冒頭にあるフライトコーチ/タイプ2は、部品調達ができなくなったため販売終了となります。
誰でも使える、品質の良い製品として組み立てて頂いたのですが、部品が無い事にはどうしようもありません。
今後の事についても未定です。
これからフライトコーチを始められる方は、次のサイトを入手の参考にしてください。
・PROTON CONTROL SYSTEMS
ページ右下のeBayでPathFinder(フライトコーチ本体)の販売。
購入後セットアップ等が必要。
GPS捕捉時間は、コールドスタート:2分、ホットスタート:20秒と記載。
・BBSトピックのebayからのPathFinder 名称のフライトコーチ
・磐田RC掲示板
PathFinderの試用開始。
その後5台入荷して説明会も開催予定。
・Precision Black Box (Flight Coach) Turn Key 直ぐに使える状態での販売。在庫0個。(2022.10.19更新)
moon様
以前、舵を切ったときの挙動に違和感を感じることが何回かありました。その原因につきましては、ネットでもいろいろと言われていますように、良く分かっておりません。現在は、フタバ製のデュアルRXリンクシステムを使用しています。このシステムを使用してからは、特に違和感を感じることはございません。
TakJP様
スマートキーの電波遮断用盗難防止ケースにも使用されています。
カーボンはある意味では要注意です。
例えば 1面でも4面でもカーボンで囲まれた場合の全方位での電波障害の懸念は絶大です。
さらに指向性の強い2.4GHz帯の受信機でも同様と考えます。
皆様どのように対応しているのでしょうか。
moon様
カーボン樹脂の情報を頂き、ありがとうございました。カーボン樹脂の電波遮断率は90%以上とのこと、ほとんどの電波が遮断されてしまいますね。F3Aフルサイズ機では、多くの機体はキャノピーのみならずモーター周りやスピナー、プロペラに至るまでカーボン樹脂が使用されていますので、特に垂直に近い上向き姿勢の際は注意が必要ですね。スライドやジャンプが無い場合でも、GPSの衛星捕捉数が12以下になる場合は、HDop, VDop, XKF4などのGPSの測定精度やカルマンフィルターの推定精度を示す数値に注意する必要があります。
機材の情報ありがとうございます。
ジャンプは、気象状況等により電波捕捉が十分でない時にたまに発生することがあります。
電波障害等の外的要因がない場合、以下のことが考えられます。
自作した物であれば、次のことが考えられます。
機材の設定について、
1、 GPSのサンプリングの転送スピードとレート設定がされているか。
2、 コンパスの設定はGPS側のコンパスのみ使用する設定になっているか。
3、 コンパス等のキャリブレーションは実施されているか。
もし、上記設定と外的要因に問題ない場合は、
ミッションプランナのソフトを使用してある程度の解析が可能です。
ミッションプランナにてフライト・データの画面で左側中央部にある小さい→でデータ・フラッシュ・ログを選択します。Pix4 Bin File to Logを選択し、フライトしたBin Fileを指定します。自動的にLog Fileに変換されます。
その後、同画面のログのレビューを選択し、先程のLog Fileを指定します。
解析画面になります。
右側に各種項目がありますので、以下を選択します。
GPSのところで、下記にチェックを入れます。
衛星捕捉数(NSats)
XKF4のところで、下記にチェックを入れます。
下記閾値は0.6です。
位置エラー(XKF4_SP)
コンパスエラー(XKF4_SM)
速度エラー(XKF4_SV)
上記の解析結果がでたものを、このBBSにアップを頂ければと思います。
ミュゼットならカーボンの影響は無いですね。
後は、飛行環境で、例えば飛行空域が水の上とか。
denkadoさん、moonさん
アドバイスありがとうございます。
当方、Pixhawk mini + 付属のM8N を使用しております。
機体はミュゼット、FCなどはキャノピー下に搭載しています。
周囲に木陰などはないのですが、あらためて周囲の状況を確認した上で試してみたいと思います。
ジャンプ対策に苦労されているようですね。
ジャンプ現象を防止するのに待機時間2時間は異常と思います。
可能であれば使用機材をお教えいただけないでしょうか。
フライトコントローラ、GPS、飛行機名です。
ご質問の待機時間が2時間の件ですが、
Li-poバッテリ3セルを電源とした場合、消費電流は概ね多くても100mA弱流れます。
上記の場合には2時間では200mAh程度を消費します。
バッテリ容量が2200mAhを満充電値とすると、2時間後は上記消費量を差し引いた分の2000mAhのLi-po電源容量となります。一割程度の電池容量を消費します。
上記を踏まえて、外部電源にするか、ご使用になる電源を選択されてください。
ところで、2時間も掛けてGPSを待機するのは実用的ではありません。
時間を掛けて行うのは、GPS基板内にある位置データ保持用のバックアップ電源のキャパシタ電池を充電する際のみです。充電してあると一週間ぐらいは前回位置を記憶していますので再度電源を投入しても早ければ十秒程度から遅くても数十秒後に捕捉できるはずです。ただし、衛星電波状況が良い状態です。
上のdenkado様のコメントにもありますが、木陰等に隠れている場合、電波障害になり、その場合は上記の時間は当てはまりません。
GPSの衛星捕捉に要する時間はメーカーで規定されています。
一般的にコールド状態(位置記憶が無し)では2分、ホット状態では数十秒と記載されているはずです。
電源を入れる時、周りに電波障害になる様な物はありませんか?
ユーザーさんの中には、ハッチバックの下や車の近くで電源を入れて不具合があった例がありました。
いつも参考にさせていただいております。
私の扱い方に問題があるのか、飛行中にどこかに飛んで(データが)しまうことが多く、パターンすべてが
正確に取得できることがありません。
飛行10分前に電源を入れ、待機させても同様のようです。
私の扱い方に根本的な原因があると思っています。
どなたかの情報で、2時間ほど置いておくと精度が上がったというのを読んだのですが
こういう場合は、フライトコントローラーの電源を別電源として小型のバッテリーを
接続したままにしておくのでしょうか。
TakJP様
置き場所は難しそうですね。
現状でのジャンプは物理的な解決方法のみと思います、フライトコーチはカーボンによる電波遮断が発生しないような所に置くのがMUSTとしか言えません。
本日はフライトコーチから離れました。
遠方からミュゼットを持参された方のダイレクトモータ+大口径ぺらの組合せでの全回転域ガバナーESCの設定と飛行確認を行いました。スロットル操作等を加味しパラメータを設定、初回設定値で気に入られフルサイズ並みの落ち着いた大きな演技をこなしていました。風切り音のみの驚きの清音です。ギアーダウン、ベルトダウンに比べるとなんとも心地良く
ダイレクトモータに戻してみる予定です。
さて、キャノピー等のカーボン繊維を樹脂で固めたものは導電性があります。
電波を強力に遮断します。
代表メーカーの東レのページです。
釈迦に説法ですが、
GPS衛星電波はほぼ1~1.5GHz帯と思いますので90%以上の電波遮蔽率です。
https://www.plastics.toray/ja/technical/torayca/tec_001.html
2.4GHz帯受信機もカーボンに電波遮断され障害を受けることは周知と思います。
グラスファイバー製であれば問題ないと思いますが、カーボンに遮断された状態でのフライトのログデータは概略は合っているように見えても品質の面では疑問に感じます。
フライトコーチのGPSで万が一受信ができても、品質は低下した電波と思います。
私感ですが、エラーの多いときの再現フライトは少しづつズレが発生、程度が悪い場合はスライド、ジャンプに繋がることが何度もありました。
moon様
詳細なご報告、ありがとうございます。データを拝見しますと、衛星捕捉数、GPS精度共にTop Stage70の方が悪いですね。やはり、カーボンの影響が大きいのでしょうか。F3Aフルサイズ機ではキャノピー以外にもカーボンが使用されていますので、それらの影響も気になります。一番の解決法はGPSアンテナを機外に出す方法かと思いますが、現状のGPSアンテナの大きさではそれも現実的ではないですね。もう少し小さくなれば可能かもしれませんが。
一方、自作の機体であれば、GPSアンテナを入れるスペースを機体表面に予め設けることが可能かもしれませんが、既製品では工作が難しいですね。Flight Coachがもっと普及すれば、GPSアンテナを入れるスペースが予め設けてあるF3Aフルサイズ機が発売されるかもしれませんね。
TakJP様
45度傾斜の優位性、各エラーが低減できることが一番です。
前傾、後傾かは今後検討する予定ですので調査後にお知らせします。
45度傾斜程度では対策不可能なことが、、。
本日、Top Stage70が来ていたので45度傾斜のフライトコーチを重心位置の胴体のバッテリー上部に搭載させて頂きデータを確認しました。仰るとおりカーボンキャノピー内での衛星捕捉が著しく低下することを実感しました。経験したことのない低い衛星捕捉数、カーボン多用のF3Aフルサイズ機では共通の弱点なのかも知れません。GPSアンテナの位置にまで対策が必要とも思えます。
Flight Coach orgの製作記事の搭載位置です。
この例では、キャノピー部を避けて後方の胴体上部のバルサ材部にGPSを取り付けています。
本日飛ばしたミュゼット単葉はジャンプは皆無でしたが、Top Stage70のフライトではジャンプが2カ所で発生しました。垂直降下時と上昇時のロール後に発生しています。
大きいジャンプはハーフ8の垂直降下後からおかしくなり始めロール切返しまで、
小さいジャンプ(ズレ)はETの垂直上昇時のロール後から水平に遷移する時に発生しました。写真を参照ください。
比較データを添付します。
上がTop Stage70(TS)のもの、
衛星捕捉数は最低7まで低下、精度、エラーは2~20倍程度に悪化します。
下がミュゼット単葉(Mu)です。
衛星捕捉数(NSats) : 7~17.08~20 @TS、 17~19.68~20 @ Mu
水平方向の精度(HDop) : 0.56~0.65~1.93 @ TS、 0.56~0.59~0.72@ Mu
下記閾値は0.6です。
位置エラー(XKF4_SP) : 0~0.2~5.43 @ TS、 0~0.03 ~0.21@ Mu
コンパスエラー(XKF4_SM) : 0~0.33~2.09 @ TS、 0~0.13~0.37@ Mu
速度エラー(XKF4_SV) : 0~0.42~7.36 @ TS、 0~0.09~0.38 @ Mu
TD_P23
イギリスのThomas DavidさんのP-23フライトです。
moon様
詳細な検討結果を報告頂き、ありがとうございました。衛星捕捉数に関してですが、私のフライトデータで捕捉数12以下が多いのは私の搭載機体特有の問題かもしれません。私が使用している機体のキャノピーはカーボン製です。GPSアンテナは重心のやや後ろに搭載してありますので、特に正面で45度上昇の時、GPSアンテナの真上にカーボン製キャノピーがくる姿勢になりますので電波が届きにくくなるのかもしれません。カーボン製キャノピーを使用している機体では注意する必要がありますね。機会がありましたらカーボン製以外のキャノピーを使用している機体で試してみます。
さて、moon様の実験結果ですが、NSatsの値、XKF4の値のいずれも45度傾斜の優位性を示しています。moon様のご賢察の通り、GPSアンテナとIMUを分離できるFCの場合は、GPSアンテナを45度傾斜させた方が良さそうですね。ところで、45度傾斜は前向きの方が良いのか、あるいは後ろ向きの方が良いのか、どちらでしょうか。私の予想では、演技構成によりそうですね。P-23の場合、垂直下降より垂直上昇の演技時間の方が長いので、P-23の場合は前向きに45度傾斜させた方が良さそうに思えますが。
TakJP様
分かり易いビジュアルな画像、情報をありがとうございます。
場所的なものか、他条件が違うのか、衛星捕捉数12以下の再現ができません。
フライトコーチを2台搭載し、45 度傾斜したものの衛星捕捉数を調査しました。
比較対象のフライトコーチはGPSアンテナが水平配置の従来のものです。
条件:
P23を6回フライト、ミュゼット単葉のキャノピー内にフライトコーチを縦列配置とし、3回は45度傾斜のものを後側の定位置とし、前側には比較対象の水平のものを配置。残りの3回は前後を入れ替え配置。
フライトコーチを横列配置での比較が理想ですが、物理的制約から断念しました。
注意:
前側への配置はモータ、ESCに近い(5cm程度の距離)ため、電磁波等による各センサへの干渉度が大きく、特にコンパスのエラーは倍以上になっています。
機体搭載時の写真(前後入れ替えたもの)を参照ください。


本日は晴天、スマホ衛星状況は45~47程度で良好です。
結果は、
45度傾斜したものは、
水平のものに比べて悪化データはありません。
前回同様に衛星捕捉数は高めに出ます。
各エラーも少ない傾向にありジャンプ現象抑制に効果があるようにも思います。
衛星捕捉数(NSats):
前後側の配置にかかわらず最低値、平均値が高めに出る傾向にあり優位。
エクセルに簡単に纏めましたのでデータ参照ください。
位置エラー(XKF4_SP):
優位です。45度傾斜は最大値が0.6オーバーが3フライト、水平のものは0.6オーバーしたものが5フライト、最大値も高めに出る傾向がある。
コンパスエラー(XKF4_SM):
優位です。45度傾斜のものを後側に配置した場合は全フライトで0.36以下、前側に配置した場合は0.75,1.04,1.86が最高値であるが平均値は最大でも0.29と小さい。
水平のものは、配置に関わらず全フライトでの最大値は1.21~4.31と高く、平均値も0.33~0.93と高めに出る。
速度エラー(XKF4_SV):
優位です。45度傾斜のものを後側に配置した場合は全フライトで0.35以下、前側に配置した場合の最高値0.25,0.24,6.36であるが0.6オーバーは1フライトのみ、平均値は最大でも0.1以下と小さい。
水平のものは、配置に関わらず0.6オーバーは3フライト、平均値も0.11~0.14と高めに出る。
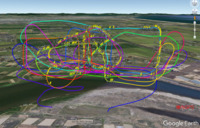
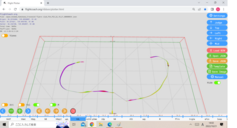
前報のGoogle Earthの画面ではNSatsが12以下になるときの機体の姿勢が良くは分かりませんでしたので、画面中に機体姿勢のロール角Roll(機体のロール軸回りの傾きで水平から右回りを正とし、単位は度。-180 <= Roll <= +180)を表示させました。トライアングル・ループのマヌーバを下図に示します。


図中のピンのラベルで、最初の数字がマヌーバの種類を、2番目の数値がRollを表します。前報で報告したとおり、背面に近い姿勢のときにNSatsが12以下になる割合が多いように見えます。
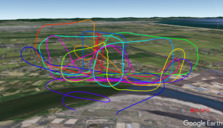
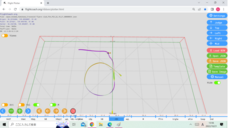
下図はハーフ・スクエアー・ループの場合です。
この場合は、ロール角に関係なくNSatsが12以下になっているように見えます。
このように、垂直姿勢ではロール角に関係なく、また垂直姿勢以外では背面に近い姿勢のときにGPSの衛星捕捉数が12以下になる割合が多いようです。