IMACのフライトもアップされてます。
確かに、 古いJSONファイルを開こうとすると警告が出てしまいますね。
Save JSONボタンでセーブし直したら見られる様になりました。
MORRISさん、書き込みありがとうございました。
優秀なカメラマンに自分のフライトを撮ってもらっている様で、とってもいいですね。 今回の動画は最近のフライトのJSONファイルだったので、何も違和感は無かったのですが、古いのは気をつけてみます。
再生したら、まるで飛行場のお立ち台で見ているようで、ちょっと感動しました。 なお、最新版のJSONファイルにセーブし直さないと読み込んでくれないようですね。
カリフォルニアの方のF23パターンです。 了解を得てアップしておきます。
MK_F25↓
11月30日までに「json」ファイルを提出とあります。 「bin」ファイルでは無いんですね。 「json」ファイルは飛行場の情報を入力する必要が無いので、フライトコーチのマップに登録してない飛行場でのフライトでも、大丈夫という事になります。
Air Craft YuGaの有我さんにリンクのお願いをしたら、早々と登録してもらえました。 福島の飛行場は日本選手権が開催されるだけの事はあって、フライトコーチのMapにもしっかりと載ってます。
ついでに世界の登録飛行場を見てみると、アメリカが結構多くなっています。 フランスは数は少ないですが、ヨーロッパ選手権が開かれる様な大きな飛行場が登録されてます。 日本は変わらずで、ちょっと出遅れて寂しい感じですね。 時代が変わりつつあります。 もちろん、実際の競技会で急激な変化は無いでしょうが、何年か先どうなっているかは誰にも分かりません。
Imai↓
クロス↓
MK_F23↓
Seb_F23↓
ファーストP23↓
hgさん、情報ありがとうございます。 私の場合、MacでSafariを使っているので、最初の投稿の様になりました。 今は次から次と新しくて良いものが出て来るので、情報収集と選択が大切ですね。
私はDeepLのChrome拡張機能を使ってます。 Webページを開きテキストを選択するとDeepLのアイコンが出てくるのでクリックすると翻訳できます。 しっくりこないときはChrome翻訳と比較しながら使ってます。
ちなみにこのページを翻訳するとChromeとちょっと違ってますね。
こんにちは 廉価で入手でき、フライトコーチに適応できるFCやGPSの情報が増えていくと 予算的に厳しい状況でもフライトコーチを利用できるので嬉しいです。 今後もよろしくお願い致します。
soramonさんが教えてくれた裏技の件について、もう少し説明してみます。
データが入っているはずなのに「オリジンが50m以上離れている」と表示され、画面の「OK」を押すと選択画面も消えて、それ以上進めなくなる事があります。
そんな時の対策については、プロッターの青ボタンManualの中にある「Errors」に少しだけ記載がありました。
その方法ですが、 そんな時はもう一度同じBINファイルを開いて、選択画面の飛行場の場所を一旦manualに戻すのです。
manualに変更したら、Copy Originを押します。 すると、パイロットとセンターまですべてがオリジンと同じ座標となります。
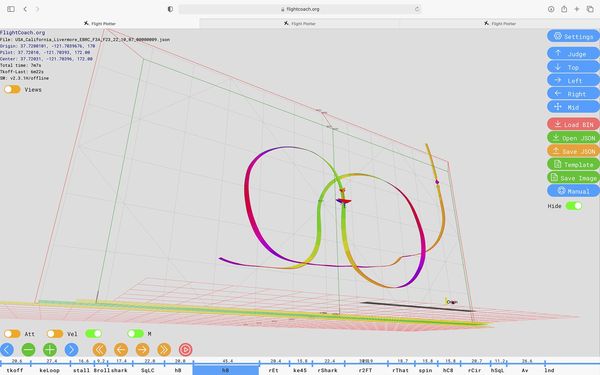
そこでSubmitを押すと、この様なリボン図が登場します。
飛行場の方角が指定されていないので、暫定的に南北方向の飛行面となっていますが、 ここまでが、フライトコーチのサイトに載っていた方法になります。
このままでも一応リボン図は見られますが、飛行場の方角を指定してやれば、誤認識したオリジンなりの飛行面が再現できる事になります。 ここからが、soramonさんが教えてくれた方法になります。
センター位置の座標をマップで調べ入力します。
すると、こんな修正画面が再現される事になるのです。
これによって、これまで見られなかったフライトが再生できる様になります。 ただ、飛行場登録していない場所では、次回のBINファイル開示時に座標を入れ直すことになるので、 飛行場所の緯度経度のデータはいつでも見られる様にしておいてください。
パスファインダーをお借りして使ってみました。 当然、テスト済みなので問題無く利用できました。 写真はブログ↓の方にもアップしてあります。 パスファインダー(フライトコーチ)
重量は、写真状態(台座やケーブル込み)で57g
Precision Black Box (Flight Coach) Turn Keyの9/29時点の在庫は3ケでした。 denkado様情報で確認した所10/2現在の在庫は1ケのみとなっています。 ほんの少量ですが、徐々には売れているようです。
リボン図のアップ、ありがとうございます。 良く飛んでますね。 私もちょうどスポーツマンをブログの方でアップしたところですが、色々な飛行例があると他の方の参考にもなると思います。 これからもお願いします。
本日、4フライトのうち1回だけ「Corrupt log file」というメッセージが出てリボン図の確認ができませんでした。 ログファイルが破損してるということだと思いますが、SDカードの問題なのかもしれません。 他の3フライトはリボン図をプロッタ上で確認しました。
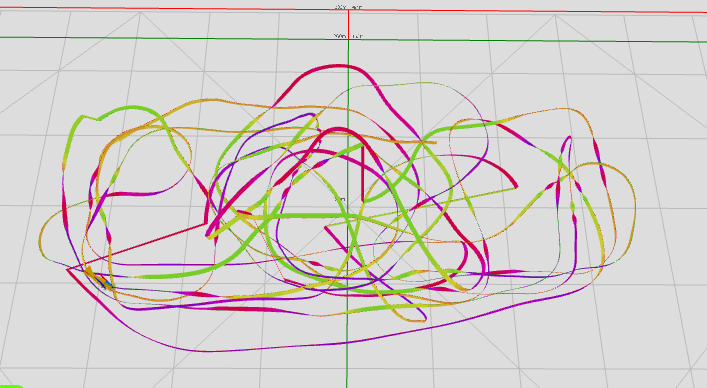
今日のフライトです。 面が離れました。
70機の5sに対応できる物を作ろうと思いFCとGPSをebayで調達しました。 買ったのは2s~6s対応の「Omnibus F4 Pro V2」と「Beitian BN-880」のGPSで、送料込みで1万弱でした。 ですが、GPSがコネクターの位置・アンテナの向き等、手持ちの物と違います。怪しいです。
プルアップ抵抗は、最初チップ抵抗を買ったんですが、あまりにも小さいので諦めました。私には無理です。 なのでリード端子の1/4W 2.2KΩをSCL・SDAの配線とFCの3.3vとの間に入れました。
ファームウェアも最新にしてとりあえずキャリブレーションまで出来ました。 一応Originの所にGPSの座標が表示され、クリックしたら自宅になってました。 アクリ板のカバーもない状態ですが、とりあえず明日ミュゼットに積んで試してみます。
競技会では人の目によって判定が下されます。 個人の趣味としてパターンを楽しむなら「理想テンプレート」を目標にすれば良いだけですが、人の目が絡む競技会となると話が複雑になってしまいます。 理想と現実にギャップがある中で理想だけを通そうとしても無理が生じます。 そこで、競技者向けとして、これまでの経験で「受けが良い」とされるフライトがあるなら、それをテンプレート化してみるのも良いのではないでしょうか。 人の目には個人差があるので一概に決めらるものではありませんが、これを通じて色々な矛盾点を掘り起こすきっかけにもなると思います。 なお、こういった競技者用テンプレートは暫定的なものなので、時代と共に「理想テンプレート」に近づいて行くものと期待できます。
上のような商品、オーストラリアではこのような製品が売られているのですね。 日本でもさらに普及してくれば良いのですが。 Precision Black Box (Flight Coach) Turn Keyはオーストラリアで販売、価格は約35.000円程度(送料、関税は別)と少し高価です。ターンキーですので即座に使用できる完成品レベルの商品と思います。 FCとGPSはMATEKSYS社製との記載あります。私の好きな会社の一つです。
勘違いしていました。上記の気圧計BMP280の基板上の配置を訂正します。
気圧計BMP280、もしくは同等品は基板の表側に搭載されていました。直射日光には少し気を使ったほうがベストです。ミュゼットのキャノピーはスモーク色ですので、直射日光の遮断効果はあります。また、denkado様販売のフライトコーチはFC基板上にスモークのアクリル板が設置してあり、さらに効果はあると思います。
フライトコーチの名前がついていたのですが、こんなものもありました。 Precision Black Box (Flight Coach) Turn Key https://precisionaeroproducts.com.au/shop/product/781-precision-black-box-flight-coach-turn-key?fbclid=IwAR20g2fcB7LIyjfzlp2q4CUy5Xa9dsKzq5vC28i3CKbe8AmqmEn28hN69-Y
部品が一括で入手できるメリットはあるかもです。 GPSとFCが結線済みケース付の組立KITと考えれば良いと思います。 DIYで仕上げることが出来る方には、選択の一つです。 デメリットは、半透明のケースのためGPSの捕捉LEDの確認が難しいことです。
半導体不足が終了しても、民生品の生産中止製品の再開は特に難しいと思います。 在庫があるうちに早めの調達がよろしいかと思います。
磐田RC掲示板に、選手のリボン図がアップされてました。 動画とリボン図を見比べられるので参考になります。
なるほど。 部品を入手する為と考えて購入するならアリなのですね。 普及に役立つかと思ったのですが、まぁ、部品が入るだけ良いという事でしょうか。
本日、PathFinderでのリボン図をプロッタ上で確認しました。 5フライト全てOKでした。 データ取得問題に問題はなく、十分に使用できると思います。
別件です、太陽光パネルと思っていました。 失礼しました、読んでみると直射日光でした。 キャノピーで覆う前の直射日光を浴びている状態でフライトコーチの電源ONし、 その後にキャノピーを被せると、あるデバイス(気圧計と思います)が誤動作し15m以上の高度を示しデータ取得を開始する。これを防ぐため、キャノピーを装着後の直射日光の影響を受けない状態にしてから、フライトコーチの電源をONするようにしている。
一般的なFC基板には、基板裏面に金属フレームの気圧計BMP280@ボッシュ製、もしくは同等品が取り付けられています。基板裏面に位置するため、通常では直射日光の影響は少ないと予想されます。 気圧計は一般的に気圧測定と温度測定を行いその計算から高度を算出します。 データシートには、気圧計に手で触れないようにと注意書きの記載があります。
纏めると、フライトコントローラに直射日光等による外乱と考えられるような温度変化を与えてはならない。、、、、と言いたいのだと思います。
直射日光が回路に影響する? 発光ダイオードは電気で光ります、逆に光を 当てると電気が出て来て電圧信号で回路に影 響するのでしょうね。 LEDに光を当てると発電するのはウソじゃ ないです(笑)。
私の場合は プルアップ抵抗は、BN880のコネクタ下のスルーホールにリード付き小型のものを半田付けしました。楽チンです
フライトコーチ用の部品をケースと共に購入したイメージです。 arduplaneのファームもV4.0.9と昨年初旬の古いバージョンがインストールされていました。 私は最新バージョンに更新しましたので、各種設定は最初から全てやり直しになりました。 明日、プロッタでのリボン図の動作確認を行う予定です。
太陽光の情報ありがとうございます。 太陽光の近くでは法律上においても飛ばせないし、、、、。
値段の安さは魅力的だったのですが、やはりそれなりの物というか、色々とあったのですね。 パスファインダーの解説書がこちらにありました。 太陽光が邪魔をするそうです。 http://donramseypattern.com/Pathfinder Setup and Use.pdf?fbclid=IwAR2mmz5ZvgWEzgWivH3jEV6Kb4s1BFMyeeJZ8H94aeSB_abp-l4TSx9K44Y
ブログ記事を書いている時の流れで久しぶりにピッチスピードの不思議を見たら、機体スピードが書いてありました。 ーーーーーー 熊谷さんのSCAT(24NiMH3300):フライト初期170km/h 水谷さんのエボリューション(24NiMH3300):フライト後半で144km/h 私のマーチ540(6NiMH3300):初期で100km/h ーーーーーー 18年前のものですが、結構スピードが出ていました。 この時は2点間の通過時間から速度を算出していて、それはそれで面白かったものです。
今ならフライトコーチでスピードは簡単に分かるので、情報があればお知らせください。
はじめまして 私も2000~2500回転程度にするのがブレーキ効果が高いと思っていましたが、 フライトコーチを使って3000~3500回転のほうがより効果が高いことを認識 しました。フライトコーチ、おもしろいですね!
ARMING_CHECKを設定すると、ブザー、またはボード上のLEDで異常をお知らせしてくれるみたいです minipixの場合は、FCのLEDが正常 グリーン点灯、異常検知 グリーンとブルーの点滅
アーミングはチェック状況に関係なく、行われます
他のボード、インジケータ、ブザーの動作と同じかどうかわかりませんが、Baro,Compass,GPS Lock,INS,Logging availableくらい設定してしばらく様子をみてみようと思います
そもそも搭載状態で、インジケータが見られるの?って問題は ありますけど。。。
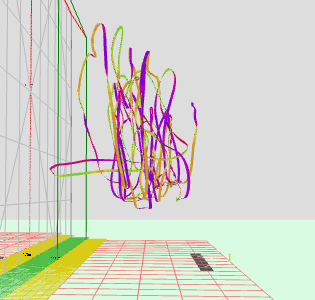
今日のジャンプです。
時間は計っていませんが、衛星キャッチ後の待機時間を前より長く取る様にしています。 調子は良いです。 でも、今日は一緒に飛ばしているメンバーのデーター不良が多かったので、不思議な感じでした。

IMACのフライトもアップされてます。
確かに、
古いJSONファイルを開こうとすると警告が出てしまいますね。
Save JSONボタンでセーブし直したら見られる様になりました。
MORRISさん、書き込みありがとうございました。
優秀なカメラマンに自分のフライトを撮ってもらっている様で、とってもいいですね。
今回の動画は最近のフライトのJSONファイルだったので、何も違和感は無かったのですが、古いのは気をつけてみます。
再生したら、まるで飛行場のお立ち台で見ているようで、ちょっと感動しました。
なお、最新版のJSONファイルにセーブし直さないと読み込んでくれないようですね。
カリフォルニアの方のF23パターンです。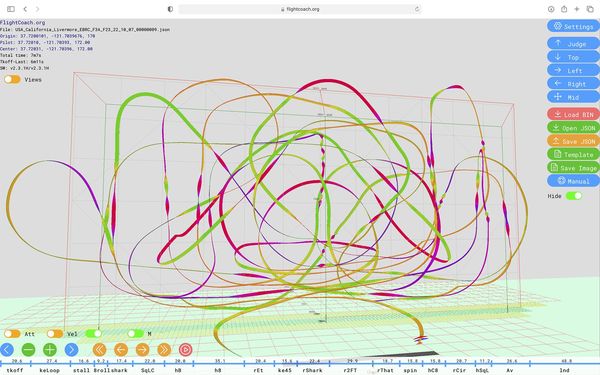
了解を得てアップしておきます。
MK_F25↓
11月30日までに「json」ファイルを提出とあります。
「bin」ファイルでは無いんですね。
「json」ファイルは飛行場の情報を入力する必要が無いので、フライトコーチのマップに登録してない飛行場でのフライトでも、大丈夫という事になります。
Air Craft YuGaの有我さんにリンクのお願いをしたら、早々と登録してもらえました。
福島の飛行場は日本選手権が開催されるだけの事はあって、フライトコーチのMapにもしっかりと載ってます。
ついでに世界の登録飛行場を見てみると、アメリカが結構多くなっています。
フランスは数は少ないですが、ヨーロッパ選手権が開かれる様な大きな飛行場が登録されてます。
日本は変わらずで、ちょっと出遅れて寂しい感じですね。
時代が変わりつつあります。
もちろん、実際の競技会で急激な変化は無いでしょうが、何年か先どうなっているかは誰にも分かりません。
Imai↓
クロス↓
MK_F23↓
Seb_F23↓
ファーストP23↓
hgさん、情報ありがとうございます。
私の場合、MacでSafariを使っているので、最初の投稿の様になりました。
今は次から次と新しくて良いものが出て来るので、情報収集と選択が大切ですね。
私はDeepLのChrome拡張機能を使ってます。
Webページを開きテキストを選択するとDeepLのアイコンが出てくるのでクリックすると翻訳できます。
しっくりこないときはChrome翻訳と比較しながら使ってます。
ちなみにこのページを翻訳するとChromeとちょっと違ってますね。
こんにちは
廉価で入手でき、フライトコーチに適応できるFCやGPSの情報が増えていくと
予算的に厳しい状況でもフライトコーチを利用できるので嬉しいです。
今後もよろしくお願い致します。
soramonさんが教えてくれた裏技の件について、もう少し説明してみます。
データが入っているはずなのに「オリジンが50m以上離れている」と表示され、画面の「OK」を押すと選択画面も消えて、それ以上進めなくなる事があります。
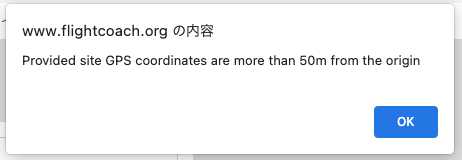
そんな時の対策については、プロッターの青ボタンManualの中にある「Errors」に少しだけ記載がありました。
その方法ですが、
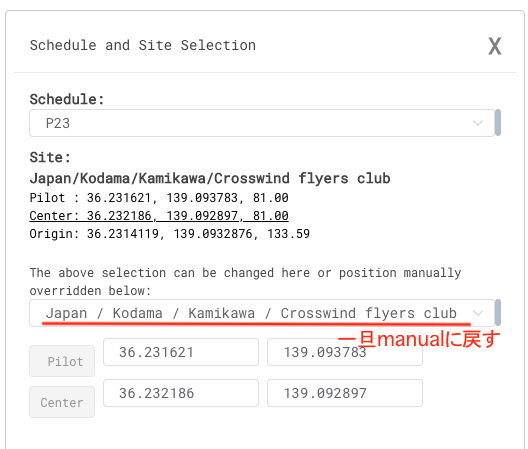
そんな時はもう一度同じBINファイルを開いて、選択画面の飛行場の場所を一旦manualに戻すのです。
manualに変更したら、Copy Originを押します。
すると、パイロットとセンターまですべてがオリジンと同じ座標となります。
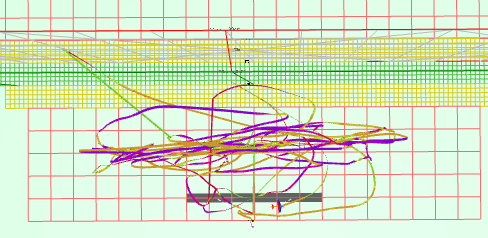
そこでSubmitを押すと、この様なリボン図が登場します。
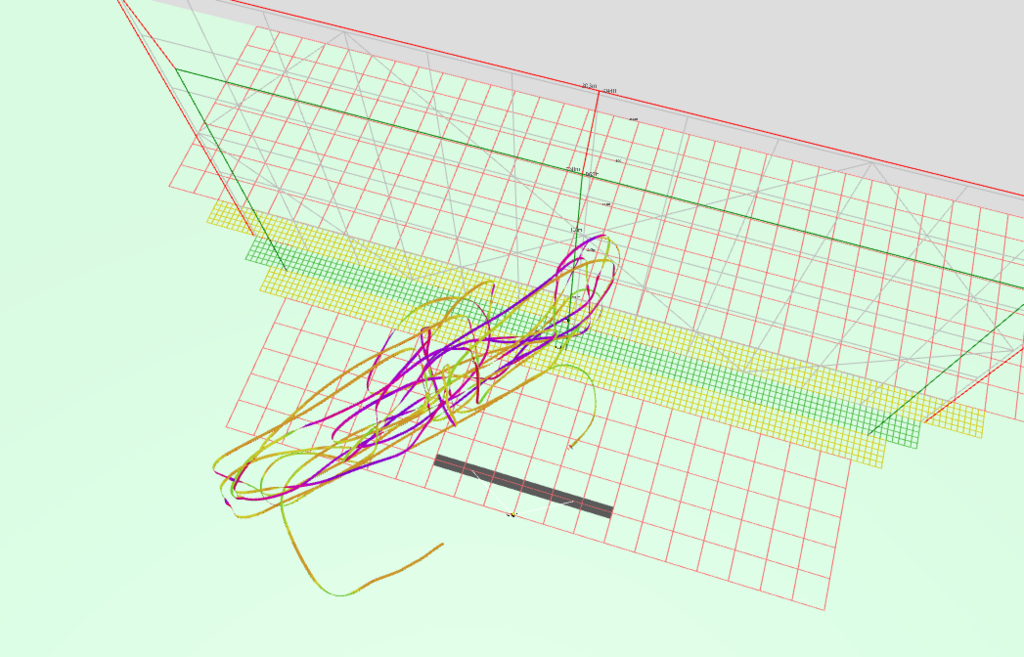
飛行場の方角が指定されていないので、暫定的に南北方向の飛行面となっていますが、
ここまでが、フライトコーチのサイトに載っていた方法になります。
このままでも一応リボン図は見られますが、飛行場の方角を指定してやれば、誤認識したオリジンなりの飛行面が再現できる事になります。
ここからが、soramonさんが教えてくれた方法になります。
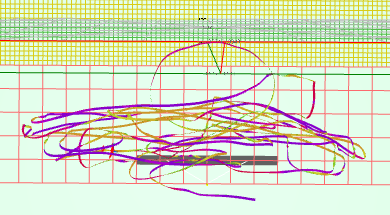
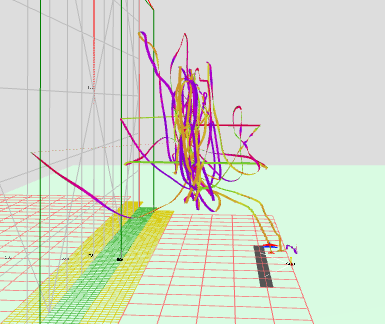
センター位置の座標をマップで調べ入力します。
すると、こんな修正画面が再現される事になるのです。
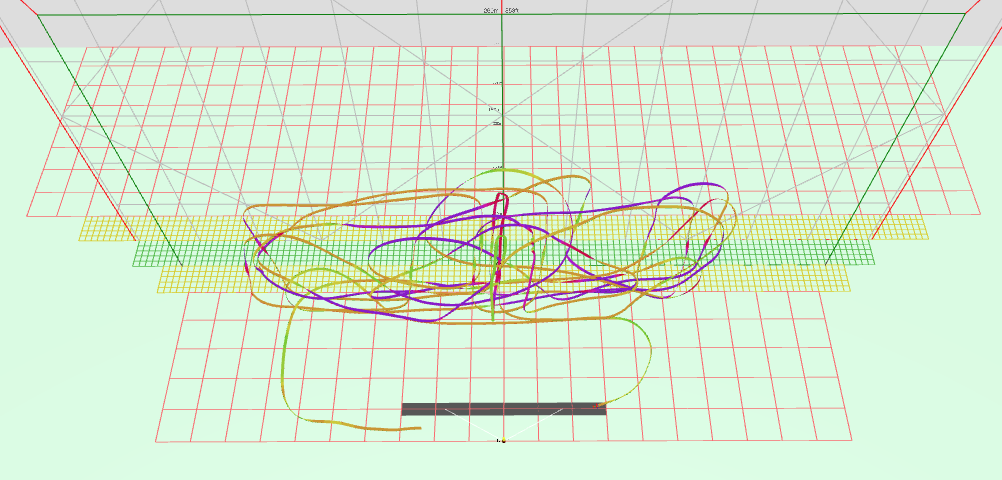
これによって、これまで見られなかったフライトが再生できる様になります。
ただ、飛行場登録していない場所では、次回のBINファイル開示時に座標を入れ直すことになるので、
飛行場所の緯度経度のデータはいつでも見られる様にしておいてください。
パスファインダーをお借りして使ってみました。
当然、テスト済みなので問題無く利用できました。
写真はブログ↓の方にもアップしてあります。
パスファインダー(フライトコーチ)
重量は、写真状態(台座やケーブル込み)で57g

Precision Black Box (Flight Coach) Turn Keyの9/29時点の在庫は3ケでした。
denkado様情報で確認した所10/2現在の在庫は1ケのみとなっています。
ほんの少量ですが、徐々には売れているようです。
リボン図のアップ、ありがとうございます。
良く飛んでますね。
私もちょうどスポーツマンをブログの方でアップしたところですが、色々な飛行例があると他の方の参考にもなると思います。
これからもお願いします。
本日、4フライトのうち1回だけ「Corrupt log file」というメッセージが出てリボン図の確認ができませんでした。
ログファイルが破損してるということだと思いますが、SDカードの問題なのかもしれません。
他の3フライトはリボン図をプロッタ上で確認しました。
今日のフライトです。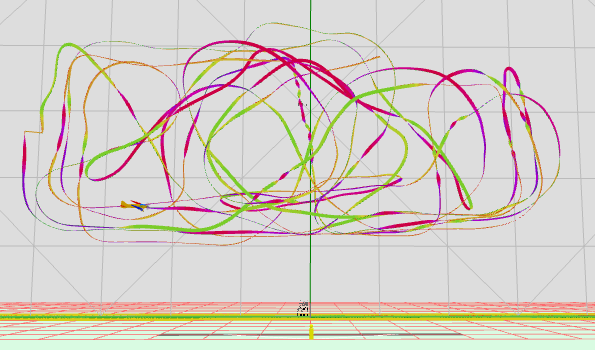
面が離れました。
70機の5sに対応できる物を作ろうと思いFCとGPSをebayで調達しました。
買ったのは2s~6s対応の「Omnibus F4 Pro V2」と「Beitian BN-880」のGPSで、送料込みで1万弱でした。
ですが、GPSがコネクターの位置・アンテナの向き等、手持ちの物と違います。怪しいです。
プルアップ抵抗は、最初チップ抵抗を買ったんですが、あまりにも小さいので諦めました。私には無理です。
なのでリード端子の1/4W 2.2KΩをSCL・SDAの配線とFCの3.3vとの間に入れました。
ファームウェアも最新にしてとりあえずキャリブレーションまで出来ました。
一応Originの所にGPSの座標が表示され、クリックしたら自宅になってました。
アクリ板のカバーもない状態ですが、とりあえず明日ミュゼットに積んで試してみます。
競技会では人の目によって判定が下されます。
個人の趣味としてパターンを楽しむなら「理想テンプレート」を目標にすれば良いだけですが、人の目が絡む競技会となると話が複雑になってしまいます。
理想と現実にギャップがある中で理想だけを通そうとしても無理が生じます。
そこで、競技者向けとして、これまでの経験で「受けが良い」とされるフライトがあるなら、それをテンプレート化してみるのも良いのではないでしょうか。
人の目には個人差があるので一概に決めらるものではありませんが、これを通じて色々な矛盾点を掘り起こすきっかけにもなると思います。
なお、こういった競技者用テンプレートは暫定的なものなので、時代と共に「理想テンプレート」に近づいて行くものと期待できます。
上のような商品、オーストラリアではこのような製品が売られているのですね。
日本でもさらに普及してくれば良いのですが。
Precision Black Box (Flight Coach) Turn Keyはオーストラリアで販売、価格は約35.000円程度(送料、関税は別)と少し高価です。ターンキーですので即座に使用できる完成品レベルの商品と思います。
FCとGPSはMATEKSYS社製との記載あります。私の好きな会社の一つです。
勘違いしていました。上記の気圧計BMP280の基板上の配置を訂正します。
気圧計BMP280、もしくは同等品は基板の表側に搭載されていました。直射日光には少し気を使ったほうがベストです。ミュゼットのキャノピーはスモーク色ですので、直射日光の遮断効果はあります。また、denkado様販売のフライトコーチはFC基板上にスモークのアクリル板が設置してあり、さらに効果はあると思います。
フライトコーチの名前がついていたのですが、こんなものもありました。
Precision Black Box (Flight Coach) Turn Key
https://precisionaeroproducts.com.au/shop/product/781-precision-black-box-flight-coach-turn-key?fbclid=IwAR20g2fcB7LIyjfzlp2q4CUy5Xa9dsKzq5vC28i3CKbe8AmqmEn28hN69-Y
部品が一括で入手できるメリットはあるかもです。
GPSとFCが結線済みケース付の組立KITと考えれば良いと思います。
DIYで仕上げることが出来る方には、選択の一つです。
デメリットは、半透明のケースのためGPSの捕捉LEDの確認が難しいことです。
半導体不足が終了しても、民生品の生産中止製品の再開は特に難しいと思います。
在庫があるうちに早めの調達がよろしいかと思います。
磐田RC掲示板に、選手のリボン図がアップされてました。
動画とリボン図を見比べられるので参考になります。
なるほど。
部品を入手する為と考えて購入するならアリなのですね。
普及に役立つかと思ったのですが、まぁ、部品が入るだけ良いという事でしょうか。
本日、PathFinderでのリボン図をプロッタ上で確認しました。


5フライト全てOKでした。
データ取得問題に問題はなく、十分に使用できると思います。
別件です、太陽光パネルと思っていました。
失礼しました、読んでみると直射日光でした。
キャノピーで覆う前の直射日光を浴びている状態でフライトコーチの電源ONし、
その後にキャノピーを被せると、あるデバイス(気圧計と思います)が誤動作し15m以上の高度を示しデータ取得を開始する。これを防ぐため、キャノピーを装着後の直射日光の影響を受けない状態にしてから、フライトコーチの電源をONするようにしている。
一般的なFC基板には、基板裏面に金属フレームの気圧計BMP280@ボッシュ製、もしくは同等品が取り付けられています。基板裏面に位置するため、通常では直射日光の影響は少ないと予想されます。
気圧計は一般的に気圧測定と温度測定を行いその計算から高度を算出します。
データシートには、気圧計に手で触れないようにと注意書きの記載があります。
纏めると、フライトコントローラに直射日光等による外乱と考えられるような温度変化を与えてはならない。、、、、と言いたいのだと思います。
直射日光が回路に影響する?
発光ダイオードは電気で光ります、逆に光を
当てると電気が出て来て電圧信号で回路に影
響するのでしょうね。
LEDに光を当てると発電するのはウソじゃ
ないです(笑)。
私の場合は プルアップ抵抗は、BN880のコネクタ下のスルーホールにリード付き小型のものを半田付けしました。楽チンです
フライトコーチ用の部品をケースと共に購入したイメージです。
arduplaneのファームもV4.0.9と昨年初旬の古いバージョンがインストールされていました。
私は最新バージョンに更新しましたので、各種設定は最初から全てやり直しになりました。
明日、プロッタでのリボン図の動作確認を行う予定です。
太陽光の情報ありがとうございます。
太陽光の近くでは法律上においても飛ばせないし、、、、。
値段の安さは魅力的だったのですが、やはりそれなりの物というか、色々とあったのですね。
パスファインダーの解説書がこちらにありました。
太陽光が邪魔をするそうです。
http://donramseypattern.com/Pathfinder Setup and Use.pdf?fbclid=IwAR2mmz5ZvgWEzgWivH3jEV6Kb4s1BFMyeeJZ8H94aeSB_abp-l4TSx9K44Y
ブログ記事を書いている時の流れで久しぶりにピッチスピードの不思議を見たら、機体スピードが書いてありました。
ーーーーーー
熊谷さんのSCAT(24NiMH3300):フライト初期170km/h
水谷さんのエボリューション(24NiMH3300):フライト後半で144km/h
私のマーチ540(6NiMH3300):初期で100km/h
ーーーーーー
18年前のものですが、結構スピードが出ていました。
この時は2点間の通過時間から速度を算出していて、それはそれで面白かったものです。
今ならフライトコーチでスピードは簡単に分かるので、情報があればお知らせください。
はじめまして
私も2000~2500回転程度にするのがブレーキ効果が高いと思っていましたが、
フライトコーチを使って3000~3500回転のほうがより効果が高いことを認識
しました。フライトコーチ、おもしろいですね!
ARMING_CHECKを設定すると、ブザー、またはボード上のLEDで異常をお知らせしてくれるみたいです
minipixの場合は、FCのLEDが正常 グリーン点灯、異常検知 グリーンとブルーの点滅
アーミングはチェック状況に関係なく、行われます
他のボード、インジケータ、ブザーの動作と同じかどうかわかりませんが、Baro,Compass,GPS Lock,INS,Logging availableくらい設定してしばらく様子をみてみようと思います
そもそも搭載状態で、インジケータが見られるの?って問題は ありますけど。。。
今日のジャンプです。
時間は計っていませんが、衛星キャッチ後の待機時間を前より長く取る様にしています。
調子は良いです。
でも、今日は一緒に飛ばしているメンバーのデーター不良が多かったので、不思議な感じでした。