自分の目の間違いに気づく事が大切です。 でも、フライトしている時は忘れちゃうんですよね。 人間なんてそんなもんですから、冷静で公正な目は必要です。
ポルコ様 SERIAL3_BAUD=38のままです。変更しても変化がないので起動時FCから設定していると思います。 BN880ではないですが外部設定ができないGPSもあるようで、こちらはボーレートを一致させないと通信できませんでした。
9月4日のフライトです
soramon様 どうもありがとうございます! やはりそうなんですか。やっちゃんこたろう様に相談したところ プルアップ抵抗が必要なのではと言うアドバイスを頂きました。 具体的にどのように入れれば良いのかわからなかったので図解を 頂けて助かります。 ところで、GPSの接続は、ミッションプランナーで通信レートの 変更等行いましたか?
あるF3Aフライヤーとお話したところ、現状人間の目がジャッジしているので、普段の練習でも 人間の目でみてもらった結果、感想を頼ると言うことでした。一理ありますが、人間の目って 正確であり、いい加減でもあるのでどうかな?とも思いました。でも、そのような考えの方が 多いと普及は早くは無いのかな?とも思います。あと、あまりにも自分の目で見たフライトと フライトコーチで描いた結果が食い違っていて、本当にフライトコーチ合っているの?と 思うことが自分自身でもあることは確かです。
私の大ボケで、RXとRX、TXとTXを接続していましたRXとTX、TXとRXに つなぎ直したらミッションプランナーでGPSを確認できました。 あとは、GPSのコンパスが見えていないようです。もう一歩です。
soramon様 AKKのF4ですがGPSとの接続で何か設定変更しましたか? J10のピン配列の説明でCH4/RX6、CH6/TX6となっているのが気になって いて、ミッションプランナーの表示ではGPS信号無しになっているので、 何らかの設定変更が必要なのかと思っております。
了解しました。カードリーダーはどれにしようかと調べてる最中でした。とても参考になりました。 ありがとうございました。
Ipadは画面が適度な大きさで奇麗ですが、より高価になって私は躊躇しています。 ご参考まで、老婆心です。 マイクロSDカードを読み込むためのカードリーダーは、国産でiPhone、iPad専用品と称したものはあまりお勧めできません。専用ソフトが必要で二名の方が買っても使用できず買いなおしています。なお、純正品は高価ですので試した方を知りません。 私は上の書込みに記載のOTG仕様のiPhoneライトニングコネクタ(1,000円程度)で接続しています。マイクロSDカードリーダーもOTG仕様です。マイクロSDカード、SDカードを直接読めるタイプもありますので、まだ選定されていないのであればご参考として頂けたらと考えます。
ありがとうございました。安心しました。とても参考になりました。その 方法でやってみます。
大丈夫と思います。 私はiphone8使用ですがOSは同じと思われます。 クラブ員もタイプ2でIpad(多分air2)を使用しています。 今日、プロッタソフトがアップデート(V.2.2.2H)となり、ブラウザはサファリ、クロームの両方ともOKでした。 前バージョンのV2.2.0H、V2.2.1Hは残念ですがOKとは言い難くNGでした。 もし、クロームでプロッタソフトがアップデート(V2.2.2H)より前のもので試されているのであれば、クロームを削除してから再インストールしてプロッタソフトの動作のご確認を頂ければと思います。
タイプ2を購入しました。タブレット ipad air2で 使うつもりですが、このタイプ2は このタブレットに対応してますか?どなたか 分かる方は いませんか?
はい、これで手軽にiPhoneで見ることができます。プロッタのソフト作成者に感謝です。 iphoneでのChromeは、一度アプリを削除後に再インストールするとOKでした。 左上の日付は前からのような気もします。申し訳なしです、確かな記憶がありません。
それで、 BINファイルを開いてみると、左上のファイルの日付が今日になっていますが、 これって、以前からそうでしたっけ?
ほぼ同時の投稿でしたね。 今度はOKの様なので良かったですね。
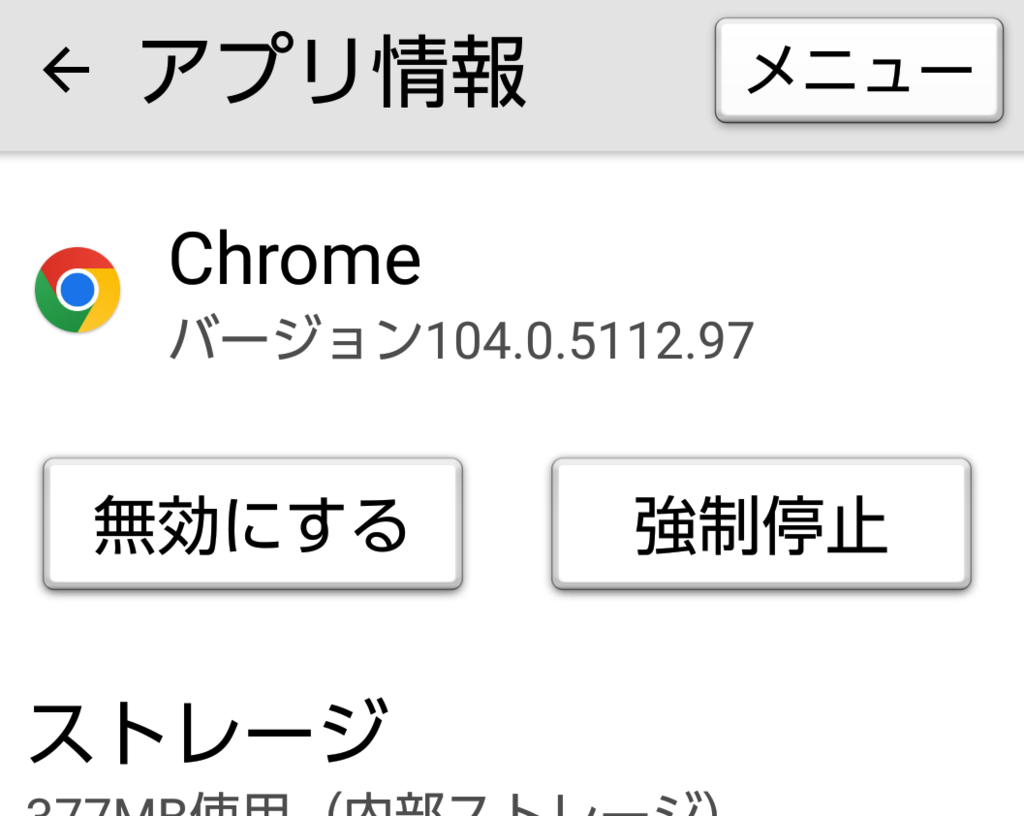
V2.2.2Hとアップデートされています。iPhone8ではChrome、Safari共にOKとなりました。 アンドロイド携帯のChromeでもOKとなり、両携帯は殆どのブラウザに対応しているようです。
先ほど、プロッターがv2.2.2Hに更新されました。 今度はMacのSafariでも動きます。
P-23パターンのフライトコーチ動画
是非、皆さんのフライトを発表してください。 フライトコーチを使って飛ばし方がどう変わっていったのか、分かると思います。
こんにちは 赤枠の部品、付いています!
今回の件は、個人利用の範囲での議論なので、管理人としての判断で問題無しとします。 色々な意見やアイデアを出し合って頂ければ、更なる発展も期待できますので、引き続いての投稿もお願いします。
denkado様 ご検討頂き、ありがとうございました。 著作権につきましては私も素人ですので、著作権に抵触せずにどこまで許されるのか分かりません。私は、皆様が困っているリボン図のジャンプについて、その修正方法に関する自分の考え方を公にするのは問題ないと考えています。しかし、この分野の専門の方が著作権に抵触する可能性有りと判断、あるいは管理人様がこのトピックを削除した方が良いと判断されるのであれば、トピックを立ち上げた者として私は管理人様のご判断を尊重致します。
BBSへの書き込みありがとうございます。 私は専門的な知識が無いので良くわからないのですが、 著作権等に関わって来る可能性のある内容については、修正や削除のご配慮を頂きたいと思っています。 その結果をみて、このトピックの取り扱いを決めさせて頂きます。
前回投稿しました方法と同様に、リボン図のジャンプの状況として、ジャンプ時刻までは正常な値で、ジャンプした後徐々に正常な値に漸近すると判断される場合に限って、ジャンプ時の値とジャンプ後数秒後の値を直線で結び、これに移動平均操作を施しました。前回のケースで、パラメータを吟味して与えた結果ジャンプのあったループのリボン図が下記のようになりました。移動平均したままですと多少凹凸が残りますので、前回と同様カルマン平滑化操作で凹凸を取り除きました。修正前のリボン図と合わせて示します。 今回は前出のパラメータを吟味する前のリボン図と比較してかなり滑らかになり、不自然なところはありません。また、ジャンプ後の飛行軌跡もジャンプ前の飛行軌跡に沿った形になり、ジャンプ前後の移動平均操作を行った前出の場合と比較してジャンプの影響が見られず、実際にフライトした時の印象から判断してより実際に近い飛行軌跡になっているものと思われます。ただし、ジャンプ後の位置情報について直線近似後移動平均操作を行っていますので、その修正精度につきましては保証できません。ジャンプ前後の領域で飛行軌跡に大きな変化をもたらすようなプロポ操作を行った場合は、参考程度にお考え頂ければと思います。 このように、ジャンプ時刻までは正常な値で、ジャンプした後徐々に正常な値に漸近すると判断される場合に限れば、今回の修正方法は有用な方法であると考えます。
離陸前の待機場所で敢えて充分時間を取っていると思えたので、不思議だなと思い質問しました。 引き続き試行してみます、ありがとうございました。
今日のフライトです。
このファイルは、たまたま携帯に保存してあったBINファイルをテストに使っただけなので、意味はありません。 普通に開いて、ジャンプエラーもありませんでした。 確かに140mとはなっていますね。特に気にしていませんでした。 8月のファイルなのに、この日付は今日になっていますね。 原因は良く分かりません。
そうでしたか。 私の場合、無効にしたり強制停止にしたり色々やっていて、アプリのアイコンが一旦消えた後に、再度有効にしたら上記の様になっていました。 理由は分かりませんが、とにかく良く動きます。 エッジもやってみましたが、同じ様に動いています。
スレ違いですが、上の9/3のjsonファイルのフライトデータのoriginが高度が140mになっています。 今日の初回のコールド状態でのものでしょうか? また、このフライトでのジャンプ等のデータ異常は無かったでしょうか? 質問ばかりで申し訳ございません。
情報ありがとうございます。 試行しましたが、アンドロイド携帯のクロームのバージョン(私のは105.xx)では残念ながら固まったままです。 キャッシュを消してもNGでした。 気が付いた点があれば、またご教示願います。 因みにiPhone8にマイクロソフトのエッジでチャレンジ、結果はプロッタが固まったままNGでした。
確かに、アンドロイドのChromeで、V2.2.1Hに自動更新されたら動かなくなってしまいました。 その後、何をしたか覚えてないのですが、再度Chromeを有効にしたら、プロッターが動く様になってました。 前よりサクサク動いて調子いいです。
正規版のV2.2.1Hに自動更新され、なんとアンドロイド携帯までiPhone8同様にNGでした。 飛行場で見られないのはストレスでしたが、今日クラブ員からエッジ上ではOKの話がありました。 確認したところ、アンドロイド携帯のエッジ上でのプロッタ動作OKです。 やっと飛行場でプロッタが見れます。
soramon様 ゼロから始めてもうプログラムが組めるとは、感服致しました。私の場合は、プログラムが組めるようになるには学び始めてから半年以上かかりました。Pythonには、移動平均やカルマンフィルターなどのデータ解析や辞書型データのJSON型データへの変換などのモジュールが揃っていますので、プログラミングが楽になります。 さて、ジャンプ場所の特定ですが、私の場合は当該時刻の移動距離と前時刻の移動距離の比が閾値を超えた場合としました。データ間の時間間隔が一定ですので、soramon様の場合と同じことになりますね。ところで、私のフライトデータでは、JSONファイルの位置情報の移動平均を取った場合ジャンプ位置前後のデータの影響が残ってしまい、不自然な飛行軌跡となっていました。そこで、ジャンプ時刻までは正常な値で、ジャンプした後徐々に正常な値に漸近するようなケースに限って、ジャンプ時の値とジャンプ後数秒後の値を直線で結び、これに移動平均操作を施しました。ジャンプ後何秒後の値を直線で結ぶかはリボン図を見て適切な値を与える必要があります。このような操作を行った結果を下図に示します。なお、細かな凹凸はカルマン平滑化法で取り除きました。 修正後のリボン図に直線部分が少し残ってしまいました。移動平均する個数やジャンプ後の直線近似するデータ数などのパラメータをもう少し吟味する必要があります。このケースでは、ジャンプ後はジャンプ前の飛行軌跡に沿った飛行軌跡になりますので、適切なパラメータさえ与えることができれば、私のケースではこの修正方法は妥当と思われます。NED座標のN値の時間変化も示します。この手法の考え方が分かるかと思います。今回のケースのようにジャンプ後に正常な値に漸近するようなケースには、この修正方法は有用ではないでしょうか。 次に変換ソフトの一般公開についてですが、私は少し懸念を持っています。といいますのは、soramon様や私が行っている方法は、Flight Coachが作成したJSONファイルを書き換えて使用していますので、著作権に抵触する可能性があるのでは、と思っています。修正の考え方を公開するのは問題ないと思いますが、その手法をプログラミングしたものを一般公開するには、少なくともFlight Coachの作成者の了解を得る必要があるのではないでしょうか。著作権につきましては、私は素人ですので慎重になりすぎているのかもしれません。この分野に詳しい方がおられましたらご教示頂ければ幸いです。
確かに、これまでのところフライトコーチの普及はそれほど速く無い感じですね。 実際に使っているのを間近で見たら驚くと思うのですが。 そういうチャンスや情報が少ないのでしょうか。 それとも、パソコンに関連するという事で、取っ付き難い感じがするのでしょうか。 いずれにしても、普及するのは間違いないと思うのですが。
TakJP 様 アドバイスしていただいたPythonで自動変換プログラムを書いてみました。 JSONファイルから、3軸それぞれの位置移動を2回微分して加速度をもとめそのベクトルの大きさが閾値(機体の移動・旋回性能?)を超えたところをジャンプ場所として自動抽出しました。 自動抽出したジャンプ場所を中心に100データの区間をサンプル数31個の移動平均を2回実施しました。ここでTakJP 様と同様に移動平均区間の開始と終了個所で多少不自然さが残ったので、全域をサンプル数11個の移動平均を行ったものが以下のものになります。
Python便利ですね。素人でもJSONファイルの読み書きができました。アドバイスありがとうございました。
冬場と違って草木が茂っているこの時期は必需品ですね。 iSearchingアプリですが、最初、別のものを入れたら反応が良くなかったので、変えてみます。
キャノピー落下、、落とし物探しに大いに役立ちました。
==========忘れ物(落とし物)防止TAG============
本日朝一番のフライト、ミュゼットBPのキャノピーをラッチしないで落下させてしまいました。 落下した所は飛行コースです、背丈以上の草木がびっしりの場所です。 でも、10分程で無事(軽傷)キャノピー&フライトコーチを回収できました。 前回の3日間探した経験を生かし、ブルーツースの忘れ物(落とし物)防止TAGをキャノピーに取り付け、待機電流が小さいので常時ONにしていました。
落下地点まで行き落下物のアプリの位置情報を確認、情報に従い近づくとブザーを鳴らすかアプリが質問してきます。 ブザーを鳴らすと1~2m先で音が聞こえ草下の地表に落ちていました。カタログ上は位置情報は10m範囲ですが、見通しが良ければ50m位の実力がありました。 先週も他の方が同様なことがありました、まだ見つけられずです。 キャノピー落下は私自身は三度目の経験です。自分は間違わないは思い込み、、誰もが経験することですから落下時に対しての対応は必要かも知れません。
画像は、忘れ物防止TAG、アプリ、ブザー画面、位置情報です。 ご参考まで、
なるほど。 良く分かりました。
soramon様 既に使われているのですね! フライト・コーチ、せっかく良いアイテムなので、機材の入手が困難になってきていたり 価格が高騰していたりで厳しい状況ですよね。手軽に入手できて、もっと普及すればいいの ですが。 途中、つまづいたら色々と教えて下さい。
いえ、流石にガバナー効果のみでは減速はできず、スロットルコントロール していて、上空での最低回転数を3000rpmにしてあります。ガバナーESCには スロットルで指示した回転数を維持できることに期待しました。ノーマルESC の方はスロットルを下げた際の回転数は測れていませんが、ブレーキ設定を 行っていないので風圧でかなり空転していると思います。
ポルコ様 自分も同じFCを使用しています。なおardupilotなどで紹介されているジャンパ一やダイオード撤去は実施せずに使用しています。パッシブブザーを付けるとMiniPix同様のサウンドが出るのでお勧めです。

自分の目の間違いに気づく事が大切です。
でも、フライトしている時は忘れちゃうんですよね。
人間なんてそんなもんですから、冷静で公正な目は必要です。
ポルコ様
SERIAL3_BAUD=38のままです。変更しても変化がないので起動時FCから設定していると思います。
BN880ではないですが外部設定ができないGPSもあるようで、こちらはボーレートを一致させないと通信できませんでした。
9月4日のフライトです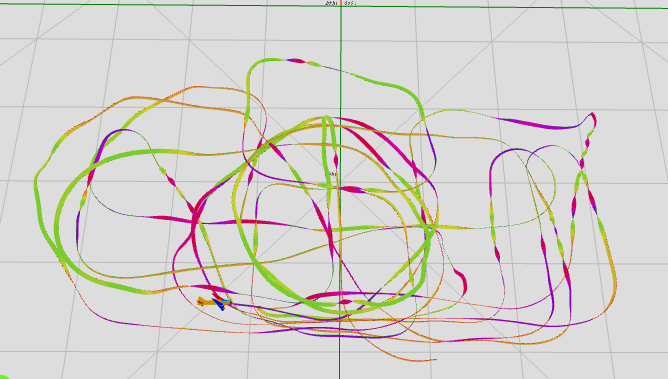
soramon様
どうもありがとうございます!
やはりそうなんですか。やっちゃんこたろう様に相談したところ
プルアップ抵抗が必要なのではと言うアドバイスを頂きました。
具体的にどのように入れれば良いのかわからなかったので図解を
頂けて助かります。
ところで、GPSの接続は、ミッションプランナーで通信レートの
変更等行いましたか?
あるF3Aフライヤーとお話したところ、現状人間の目がジャッジしているので、普段の練習でも
人間の目でみてもらった結果、感想を頼ると言うことでした。一理ありますが、人間の目って
正確であり、いい加減でもあるのでどうかな?とも思いました。でも、そのような考えの方が
多いと普及は早くは無いのかな?とも思います。あと、あまりにも自分の目で見たフライトと
フライトコーチで描いた結果が食い違っていて、本当にフライトコーチ合っているの?と
思うことが自分自身でもあることは確かです。
私の大ボケで、RXとRX、TXとTXを接続していましたRXとTX、TXとRXに
つなぎ直したらミッションプランナーでGPSを確認できました。
あとは、GPSのコンパスが見えていないようです。もう一歩です。
soramon様
AKKのF4ですがGPSとの接続で何か設定変更しましたか?
J10のピン配列の説明でCH4/RX6、CH6/TX6となっているのが気になって
いて、ミッションプランナーの表示ではGPS信号無しになっているので、
何らかの設定変更が必要なのかと思っております。
了解しました。カードリーダーはどれにしようかと調べてる最中でした。とても参考になりました。
ありがとうございました。
Ipadは画面が適度な大きさで奇麗ですが、より高価になって私は躊躇しています。
ご参考まで、老婆心です。
マイクロSDカードを読み込むためのカードリーダーは、国産でiPhone、iPad専用品と称したものはあまりお勧めできません。専用ソフトが必要で二名の方が買っても使用できず買いなおしています。なお、純正品は高価ですので試した方を知りません。
私は上の書込みに記載のOTG仕様のiPhoneライトニングコネクタ(1,000円程度)で接続しています。マイクロSDカードリーダーもOTG仕様です。マイクロSDカード、SDカードを直接読めるタイプもありますので、まだ選定されていないのであればご参考として頂けたらと考えます。
ありがとうございました。安心しました。とても参考になりました。その 方法でやってみます。
大丈夫と思います。
私はiphone8使用ですがOSは同じと思われます。
クラブ員もタイプ2でIpad(多分air2)を使用しています。
今日、プロッタソフトがアップデート(V.2.2.2H)となり、ブラウザはサファリ、クロームの両方ともOKでした。
前バージョンのV2.2.0H、V2.2.1Hは残念ですがOKとは言い難くNGでした。
もし、クロームでプロッタソフトがアップデート(V2.2.2H)より前のもので試されているのであれば、クロームを削除してから再インストールしてプロッタソフトの動作のご確認を頂ければと思います。
タイプ2を購入しました。タブレット ipad air2で 使うつもりですが、このタイプ2は
このタブレットに対応してますか?どなたか
分かる方は いませんか?
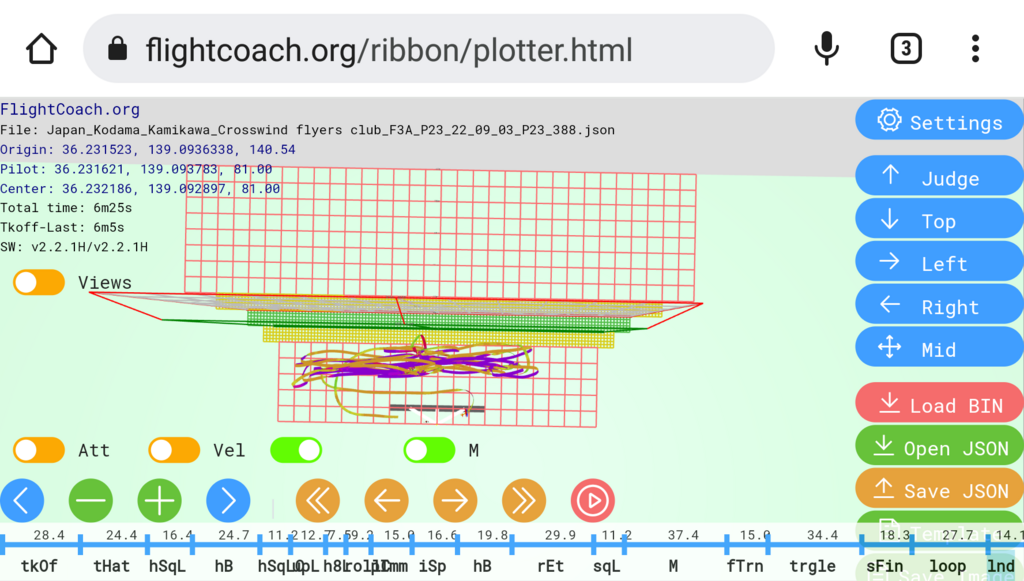
はい、これで手軽にiPhoneで見ることができます。プロッタのソフト作成者に感謝です。
iphoneでのChromeは、一度アプリを削除後に再インストールするとOKでした。
左上の日付は前からのような気もします。申し訳なしです、確かな記憶がありません。
それで、
BINファイルを開いてみると、左上のファイルの日付が今日になっていますが、
これって、以前からそうでしたっけ?
ほぼ同時の投稿でしたね。
今度はOKの様なので良かったですね。
V2.2.2Hとアップデートされています。iPhone8ではChrome、Safari共にOKとなりました。
アンドロイド携帯のChromeでもOKとなり、両携帯は殆どのブラウザに対応しているようです。
先ほど、プロッターがv2.2.2Hに更新されました。
今度はMacのSafariでも動きます。
P-23パターンのフライトコーチ動画
是非、皆さんのフライトを発表してください。
フライトコーチを使って飛ばし方がどう変わっていったのか、分かると思います。
こんにちは
赤枠の部品、付いています!
今回の件は、個人利用の範囲での議論なので、管理人としての判断で問題無しとします。
色々な意見やアイデアを出し合って頂ければ、更なる発展も期待できますので、引き続いての投稿もお願いします。
denkado様
ご検討頂き、ありがとうございました。
著作権につきましては私も素人ですので、著作権に抵触せずにどこまで許されるのか分かりません。私は、皆様が困っているリボン図のジャンプについて、その修正方法に関する自分の考え方を公にするのは問題ないと考えています。しかし、この分野の専門の方が著作権に抵触する可能性有りと判断、あるいは管理人様がこのトピックを削除した方が良いと判断されるのであれば、トピックを立ち上げた者として私は管理人様のご判断を尊重致します。
BBSへの書き込みありがとうございます。
私は専門的な知識が無いので良くわからないのですが、
著作権等に関わって来る可能性のある内容については、修正や削除のご配慮を頂きたいと思っています。
その結果をみて、このトピックの取り扱いを決めさせて頂きます。
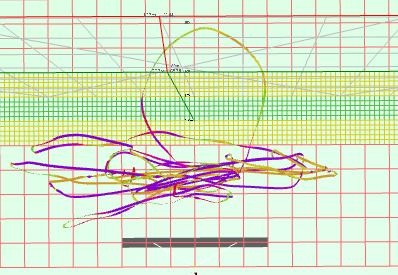
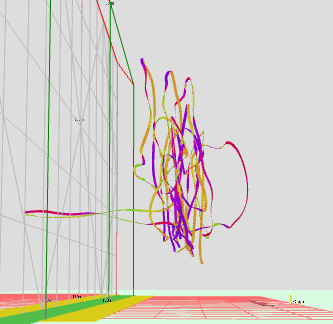
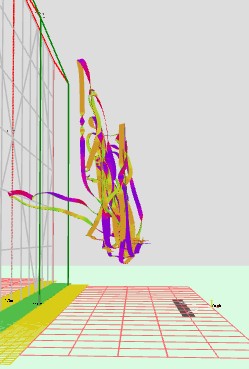
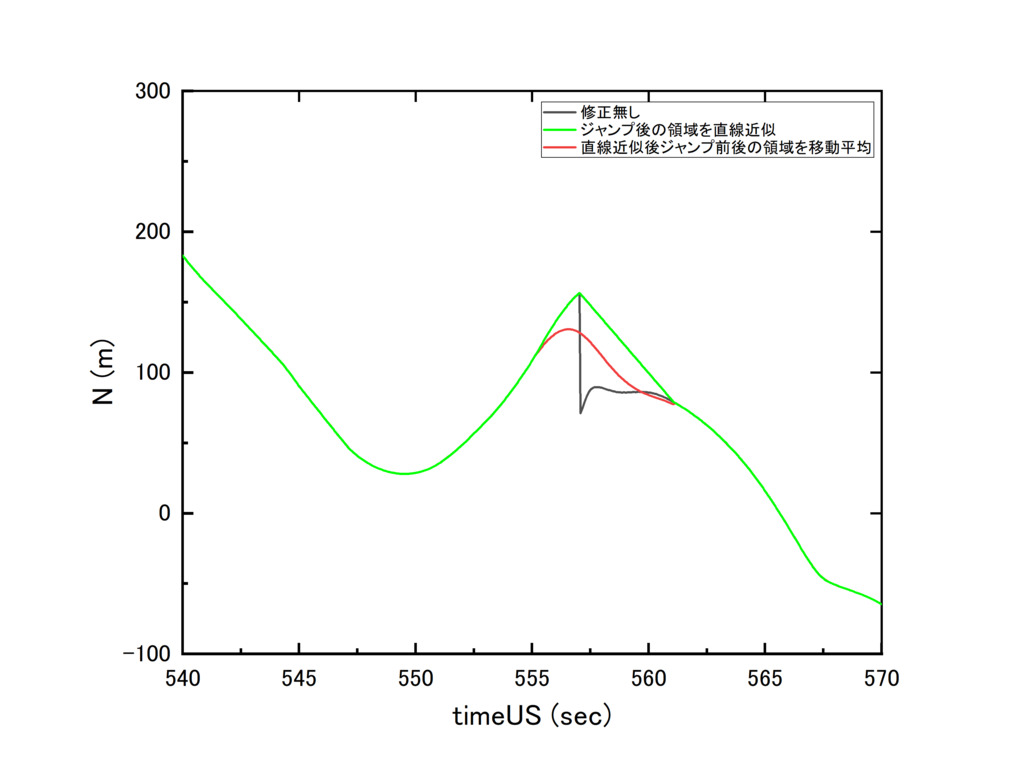
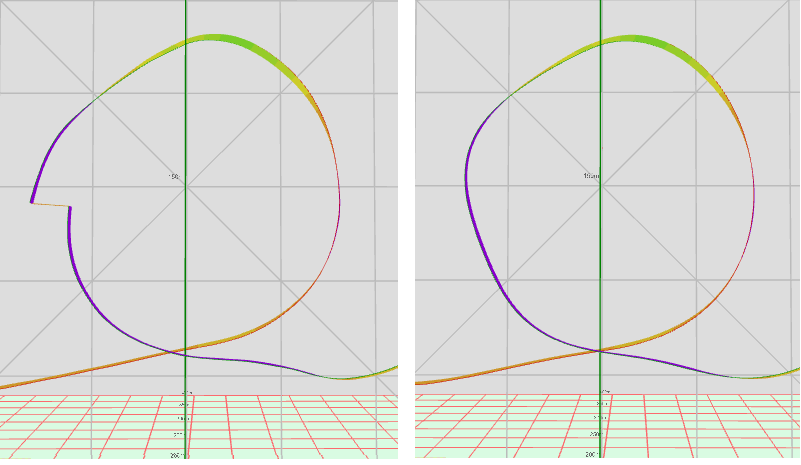
前回投稿しました方法と同様に、リボン図のジャンプの状況として、ジャンプ時刻までは正常な値で、ジャンプした後徐々に正常な値に漸近すると判断される場合に限って、ジャンプ時の値とジャンプ後数秒後の値を直線で結び、これに移動平均操作を施しました。前回のケースで、パラメータを吟味して与えた結果ジャンプのあったループのリボン図が下記のようになりました。移動平均したままですと多少凹凸が残りますので、前回と同様カルマン平滑化操作で凹凸を取り除きました。修正前のリボン図と合わせて示します。
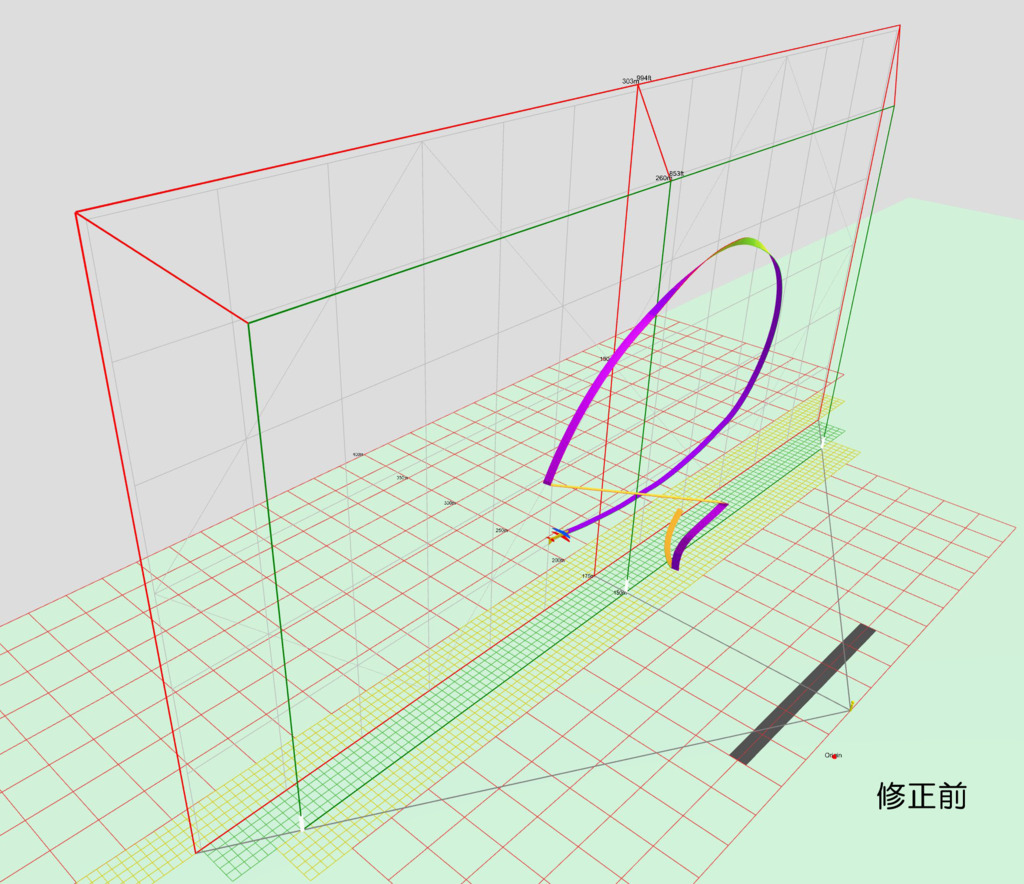
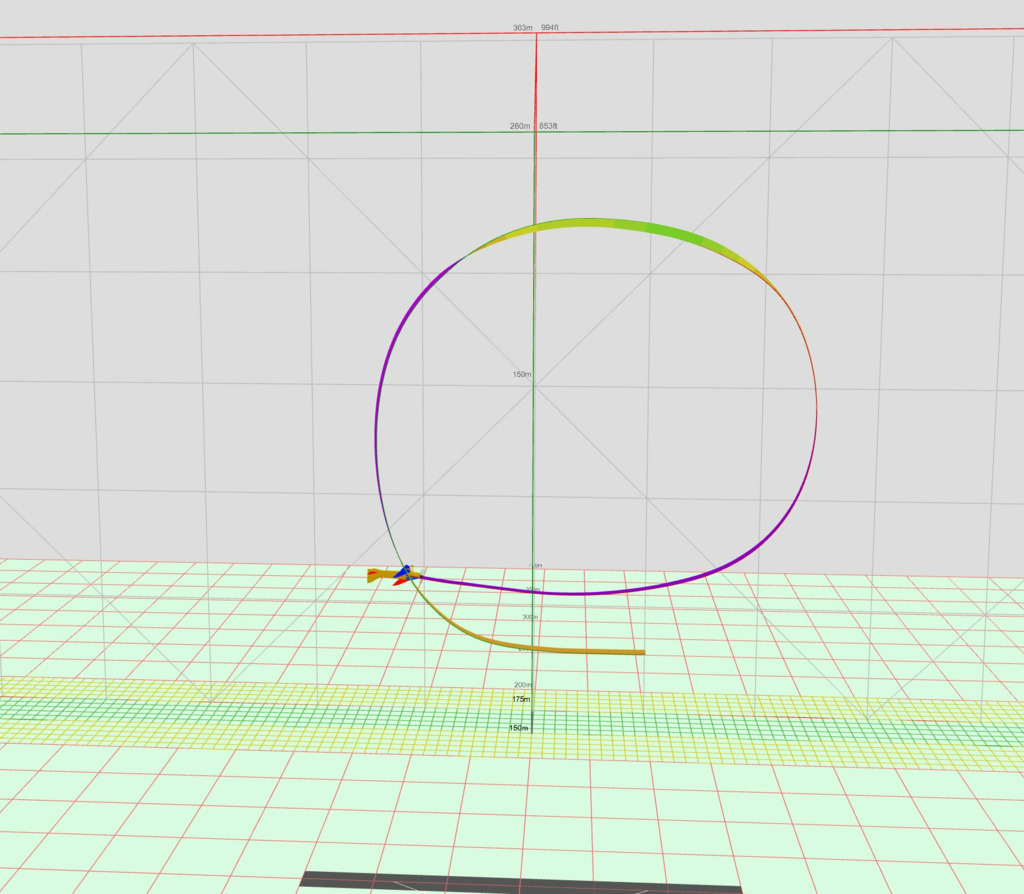
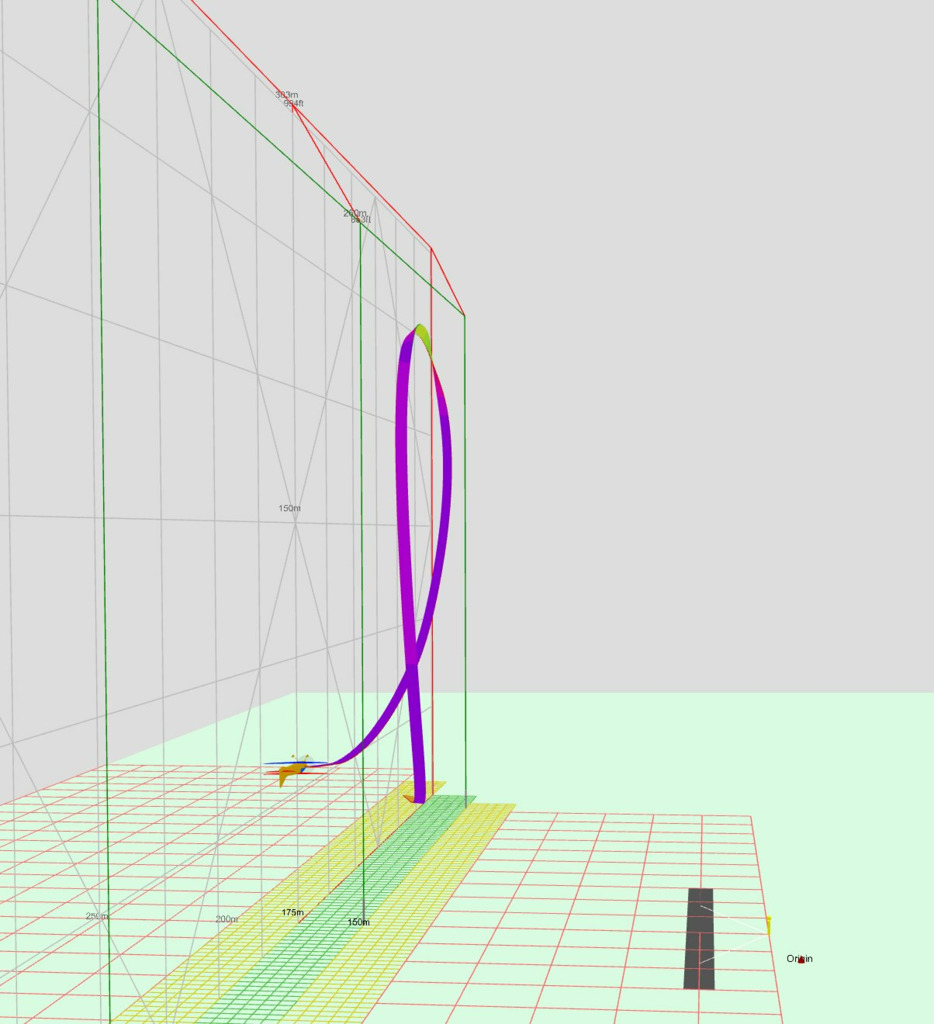
今回は前出のパラメータを吟味する前のリボン図と比較してかなり滑らかになり、不自然なところはありません。また、ジャンプ後の飛行軌跡もジャンプ前の飛行軌跡に沿った形になり、ジャンプ前後の移動平均操作を行った前出の場合と比較してジャンプの影響が見られず、実際にフライトした時の印象から判断してより実際に近い飛行軌跡になっているものと思われます。ただし、ジャンプ後の位置情報について直線近似後移動平均操作を行っていますので、その修正精度につきましては保証できません。ジャンプ前後の領域で飛行軌跡に大きな変化をもたらすようなプロポ操作を行った場合は、参考程度にお考え頂ければと思います。
このように、ジャンプ時刻までは正常な値で、ジャンプした後徐々に正常な値に漸近すると判断される場合に限れば、今回の修正方法は有用な方法であると考えます。
離陸前の待機場所で敢えて充分時間を取っていると思えたので、不思議だなと思い質問しました。
引き続き試行してみます、ありがとうございました。
今日のフライトです。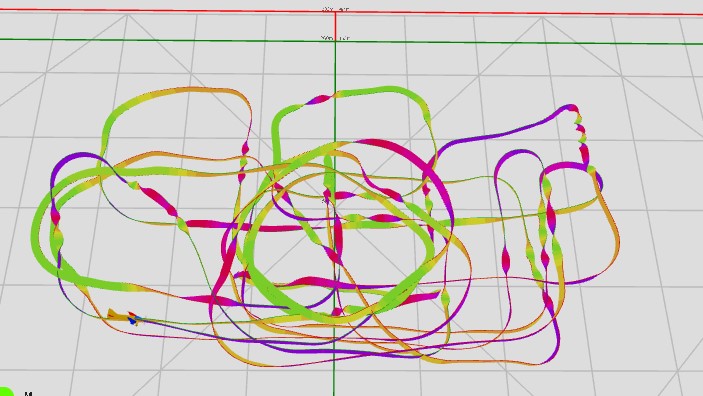
このファイルは、たまたま携帯に保存してあったBINファイルをテストに使っただけなので、意味はありません。
普通に開いて、ジャンプエラーもありませんでした。
確かに140mとはなっていますね。特に気にしていませんでした。
8月のファイルなのに、この日付は今日になっていますね。
原因は良く分かりません。
そうでしたか。
私の場合、無効にしたり強制停止にしたり色々やっていて、アプリのアイコンが一旦消えた後に、再度有効にしたら上記の様になっていました。
理由は分かりませんが、とにかく良く動きます。
エッジもやってみましたが、同じ様に動いています。
スレ違いですが、上の9/3のjsonファイルのフライトデータのoriginが高度が140mになっています。
今日の初回のコールド状態でのものでしょうか? また、このフライトでのジャンプ等のデータ異常は無かったでしょうか? 質問ばかりで申し訳ございません。
情報ありがとうございます。
試行しましたが、アンドロイド携帯のクロームのバージョン(私のは105.xx)では残念ながら固まったままです。
キャッシュを消してもNGでした。
気が付いた点があれば、またご教示願います。
因みにiPhone8にマイクロソフトのエッジでチャレンジ、結果はプロッタが固まったままNGでした。
確かに、アンドロイドのChromeで、V2.2.1Hに自動更新されたら動かなくなってしまいました。
その後、何をしたか覚えてないのですが、再度Chromeを有効にしたら、プロッターが動く様になってました。
前よりサクサク動いて調子いいです。
正規版のV2.2.1Hに自動更新され、なんとアンドロイド携帯までiPhone8同様にNGでした。
飛行場で見られないのはストレスでしたが、今日クラブ員からエッジ上ではOKの話がありました。
確認したところ、アンドロイド携帯のエッジ上でのプロッタ動作OKです。
やっと飛行場でプロッタが見れます。
soramon様
ゼロから始めてもうプログラムが組めるとは、感服致しました。私の場合は、プログラムが組めるようになるには学び始めてから半年以上かかりました。Pythonには、移動平均やカルマンフィルターなどのデータ解析や辞書型データのJSON型データへの変換などのモジュールが揃っていますので、プログラミングが楽になります。
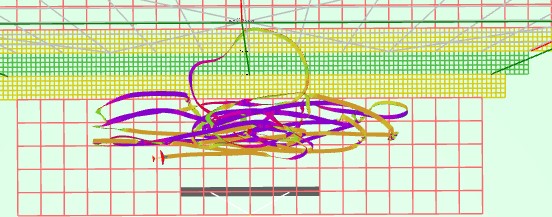
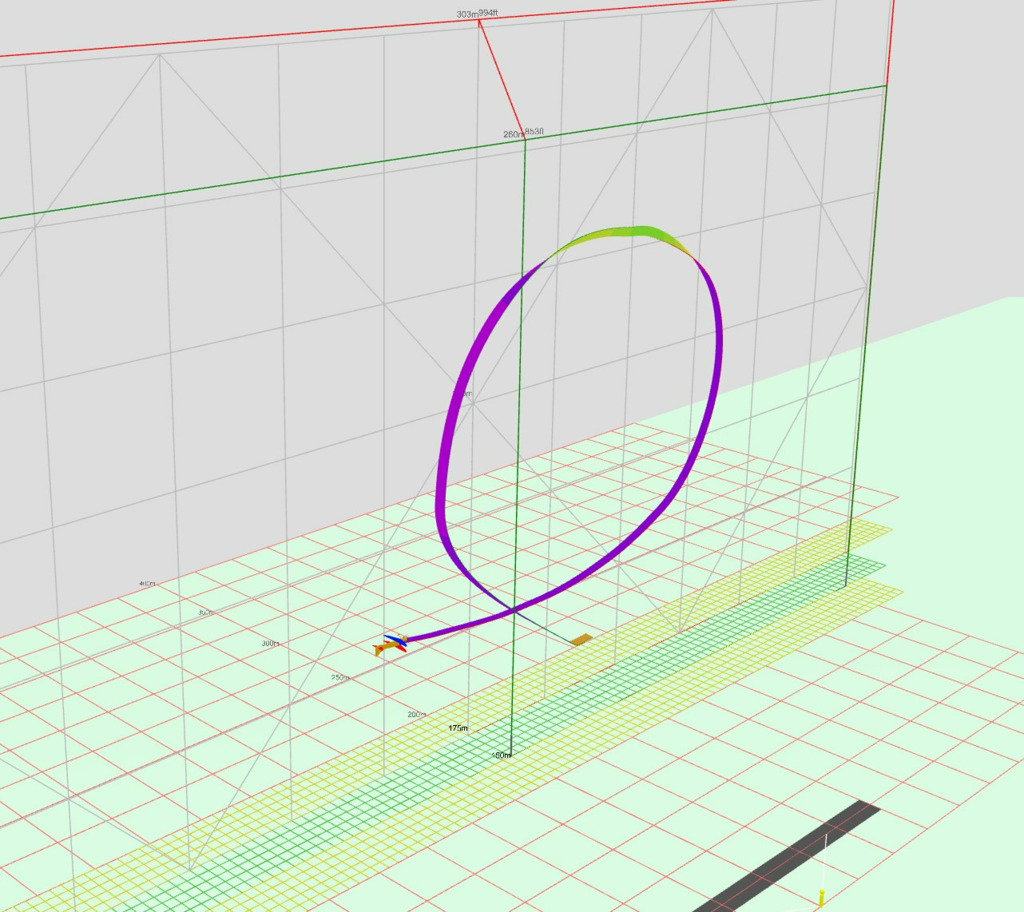
さて、ジャンプ場所の特定ですが、私の場合は当該時刻の移動距離と前時刻の移動距離の比が閾値を超えた場合としました。データ間の時間間隔が一定ですので、soramon様の場合と同じことになりますね。ところで、私のフライトデータでは、JSONファイルの位置情報の移動平均を取った場合ジャンプ位置前後のデータの影響が残ってしまい、不自然な飛行軌跡となっていました。そこで、ジャンプ時刻までは正常な値で、ジャンプした後徐々に正常な値に漸近するようなケースに限って、ジャンプ時の値とジャンプ後数秒後の値を直線で結び、これに移動平均操作を施しました。ジャンプ後何秒後の値を直線で結ぶかはリボン図を見て適切な値を与える必要があります。このような操作を行った結果を下図に示します。なお、細かな凹凸はカルマン平滑化法で取り除きました。
修正後のリボン図に直線部分が少し残ってしまいました。移動平均する個数やジャンプ後の直線近似するデータ数などのパラメータをもう少し吟味する必要があります。このケースでは、ジャンプ後はジャンプ前の飛行軌跡に沿った飛行軌跡になりますので、適切なパラメータさえ与えることができれば、私のケースではこの修正方法は妥当と思われます。NED座標のN値の時間変化も示します。この手法の考え方が分かるかと思います。今回のケースのようにジャンプ後に正常な値に漸近するようなケースには、この修正方法は有用ではないでしょうか。
次に変換ソフトの一般公開についてですが、私は少し懸念を持っています。といいますのは、soramon様や私が行っている方法は、Flight Coachが作成したJSONファイルを書き換えて使用していますので、著作権に抵触する可能性があるのでは、と思っています。修正の考え方を公開するのは問題ないと思いますが、その手法をプログラミングしたものを一般公開するには、少なくともFlight Coachの作成者の了解を得る必要があるのではないでしょうか。著作権につきましては、私は素人ですので慎重になりすぎているのかもしれません。この分野に詳しい方がおられましたらご教示頂ければ幸いです。
確かに、これまでのところフライトコーチの普及はそれほど速く無い感じですね。
実際に使っているのを間近で見たら驚くと思うのですが。
そういうチャンスや情報が少ないのでしょうか。
それとも、パソコンに関連するという事で、取っ付き難い感じがするのでしょうか。
いずれにしても、普及するのは間違いないと思うのですが。
TakJP 様
アドバイスしていただいたPythonで自動変換プログラムを書いてみました。
JSONファイルから、3軸それぞれの位置移動を2回微分して加速度をもとめそのベクトルの大きさが閾値(機体の移動・旋回性能?)を超えたところをジャンプ場所として自動抽出しました。
自動抽出したジャンプ場所を中心に100データの区間をサンプル数31個の移動平均を2回実施しました。ここでTakJP 様と同様に移動平均区間の開始と終了個所で多少不自然さが残ったので、全域をサンプル数11個の移動平均を行ったものが以下のものになります。
Python便利ですね。素人でもJSONファイルの読み書きができました。アドバイスありがとうございました。
冬場と違って草木が茂っているこの時期は必需品ですね。
iSearchingアプリですが、最初、別のものを入れたら反応が良くなかったので、変えてみます。
キャノピー落下、、落とし物探しに大いに役立ちました。
==========忘れ物(落とし物)防止TAG============
本日朝一番のフライト、ミュゼットBPのキャノピーをラッチしないで落下させてしまいました。
落下した所は飛行コースです、背丈以上の草木がびっしりの場所です。
でも、10分程で無事(軽傷)キャノピー&フライトコーチを回収できました。
前回の3日間探した経験を生かし、ブルーツースの忘れ物(落とし物)防止TAGをキャノピーに取り付け、待機電流が小さいので常時ONにしていました。
落下地点まで行き落下物のアプリの位置情報を確認、情報に従い近づくとブザーを鳴らすかアプリが質問してきます。
ブザーを鳴らすと1~2m先で音が聞こえ草下の地表に落ちていました。カタログ上は位置情報は10m範囲ですが、見通しが良ければ50m位の実力がありました。
先週も他の方が同様なことがありました、まだ見つけられずです。
キャノピー落下は私自身は三度目の経験です。自分は間違わないは思い込み、、誰もが経験することですから落下時に対しての対応は必要かも知れません。
画像は、忘れ物防止TAG、アプリ、ブザー画面、位置情報です。
ご参考まで、
なるほど。
良く分かりました。
soramon様
既に使われているのですね!
フライト・コーチ、せっかく良いアイテムなので、機材の入手が困難になってきていたり
価格が高騰していたりで厳しい状況ですよね。手軽に入手できて、もっと普及すればいいの
ですが。
途中、つまづいたら色々と教えて下さい。
いえ、流石にガバナー効果のみでは減速はできず、スロットルコントロール
していて、上空での最低回転数を3000rpmにしてあります。ガバナーESCには
スロットルで指示した回転数を維持できることに期待しました。ノーマルESC
の方はスロットルを下げた際の回転数は測れていませんが、ブレーキ設定を
行っていないので風圧でかなり空転していると思います。
ポルコ様
自分も同じFCを使用しています。なおardupilotなどで紹介されているジャンパ一やダイオード撤去は実施せずに使用しています。パッシブブザーを付けるとMiniPix同様のサウンドが出るのでお勧めです。