Onda F23
Acrobacia de Precisión FAI F3A コロンビアのMarcelo Velezさんのブログ。 決勝の様子がアップされました。
公式のサイトが中々更新されないので、一応結果だけ。
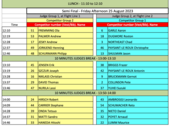
決勝の飛行順 3フライトの合計点で順位が決まります。
決勝用のアンノウン1とアンノウン2が発表されました。
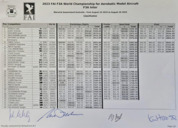
準決勝の結果。 大会のページはこちら。
得点の計算方法はコメント46に記載。
2023 F3A World Championship Day 5 Semi Finals Practice Australia Thomas David選手本人のコメントもあります。 公平を期するため、試合ではフライトコーチは使いません。
準決勝で採用される点数の件で誤りがありました。 正しくは、 FAI Sporting Codeの、5.1.9. Classification、に記載があり、 予選分が1つのラウンドとしてカウントされます。 Fパターンの2ラウンドを加え、合計3つの中から上位の2つの合計が準決勝の得点となります。
---引用------- 5.1.9. Classification a) 世界選手権および大陸選手権では、各競技者は 4 つの予備 (スケジュール P) フライトを行い、上位 3 つの正規化スコアが予備ランキングを決定するためにカウントされます。 上位半分の参加者は 30 名以下で、既知の決勝スケジュールに合わせて準決勝 2 便が追加で運航されます。 準決勝出場者の予選フライトの上位 3 回の合計 (再び 1000 ポイントに正規化) が 1 スコアとしてカウントされ、準決勝の 2 スコアと合わせて 3 つのスコアが得られ、上位 2 つが準決勝の分類にカウントされます。
2023 F3A World Championship Inglewood Practice Interviews
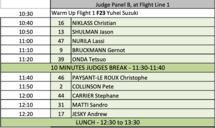
25日の準決勝飛行順 大元はこちら
2023 F3A World Championship Day 4 Australia
Aeromodelismo F3A Colombia - Otro punto de vista. 世界選手権での審査がどの様に行われているのか、良くわかります。
24日は予備日で、25日には、予選を勝ち抜いた30名で準決勝が行われ、演技種目はF-23となります。
トップの選手です。
予選の結果 詳しくはこちら
こんばんは。どこの国のパイロットですか?
尚、現在トップを走っている選手がフライトコーチを利用しているかどうかなど分かりませんが、何もしていない段階で既にこの様なフライトを行っていたのですから、驚きしかありません。
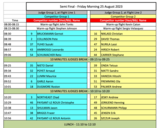
予選最終日のフライト順。
この後で上位30名が準決勝に進みます。 予選の点数は考慮されず、また新たなスタートとなります。
演技が決勝用のパターンとなるので、審査員の打ち合わせも行われます。
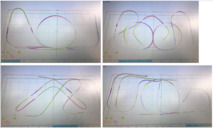
テンプレートを再度掲載しますが、絶えず見比べてください。 予選パターンも今日までです。 F3A P-23 Template FCJudge
F3A world championship 2023 Australia day3 Jason Schulman line 1
Aeromodelismo F3A Colombia - Otro punto de vista. 審査員もまた審査される対象でもあるので、中々大変な仕事です。
2023 F3A World Championship Australia Day 2 Line 2 Jason Shulman
2023 F3A World Championship Australia Day 2 Line one, Yuhei Suzuki
得点表です。 自分でも採点練習してみましたが、動画だけでは情報不足のため、甘い点数になってしまいます。 どんなところを減点するのかは、1人の審査員のブログAeromodelismo F3A Colombia - Otro punto de vista.にも記されている通りです。
羽根田 予選Day2
リンク集で紹介したコロンビアの2人のブログ。 審査員と選手という違った立場での体験を通して大会の緊張感が伝わってきます。 Aeromodelismo F3A Colombia - Otro punto de vista. Acrobacia de Precisión FAI F3A
2日目までの結果 https://f3a.com.au/2023wch/preliminary-results/
denkadoさま
ありがとうございます。 色々と使いこなせるよう頑張ってみます!
投稿ありがとうございます。 センター等の位置どりに気をつけているのが、良いと思います。 フライトコーチにはいろんな機能があるので、試してみてください。
飛行機を初めて半年の笠原と申します。
この度大会へ向けての練習でフライトコーチ導入をさせて頂きました。
先月、広島の大会ではナービスクラスで参加。 来月は高知の大会でスポーツマンクラスへエントリーしています。
真っ直ぐに飛ばすのも難しい操縦レベルで、尚且つ独学ですが、しっかり活用して頑張りたいと思いますので宜しくお願い致します。
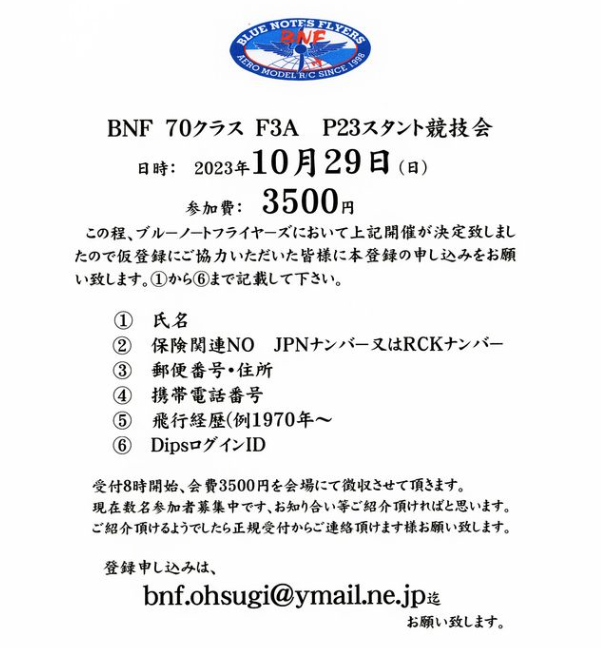
本登録について。
Live Scoresは、青色のNOTAUMATiCアイコンをクリックでした。 その後、Menuから進みます。
得点をクリックすると、採点の詳細が見られます。
Live Webcam Line2だけがやっと見られる様になりました。
選手が練習するのと同じ様に、審査員も集まって基準統一を図ります。
ライブで見られる予定 Live Webcam Live Scores
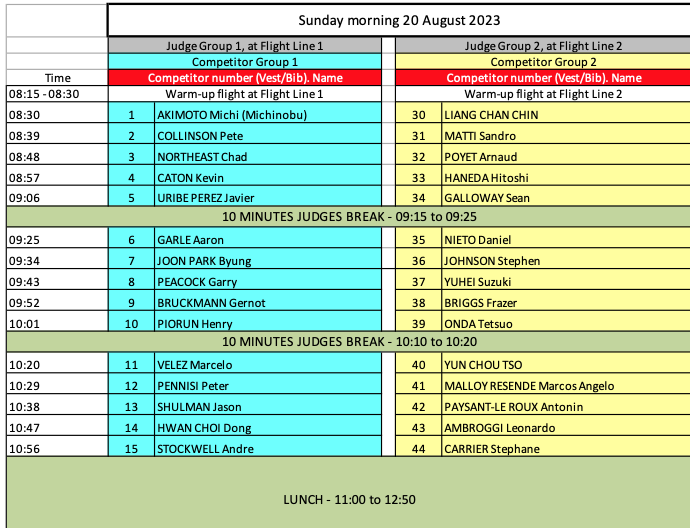
20日、1ラウンド目の飛行順
開会式
今日の状況。 コメント14の動画と全く同じで、時々瞬間的にノイズ発生。 この程度では、フライトしていても全く異常は感じないので、トラブルが起こるとすればもっと違った状況の時なのでしょう。 世界選手権の様な大会でも毎回トラブルは発生していて、今回も有名選手が原因不明で機体を失いましたが、空ものRCの一番難しいところでもあります。
本日19日に公式練習と開会式が行われ、明日20日から競技開始となります。
大会の様子は、 コロンビアのMarcelo Velez選手のブログAcrobacia de Precisión FAI F3Aや、 審査員の1人、Patrick De WaegenaereさんのブログAeromodelismo F3A Colombia - Otro punto de vista. でも見ることができます。
練習飛行 Thomas P23 in Australia

Onda F23
Acrobacia de Precisión FAI F3A コロンビアのMarcelo Velezさんのブログ。
決勝の様子がアップされました。
公式のサイトが中々更新されないので、一応結果だけ。
決勝の飛行順

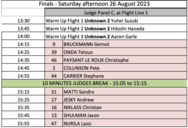
3フライトの合計点で順位が決まります。
決勝用のアンノウン1とアンノウン2が発表されました。


準決勝の結果。

大会のページはこちら。
得点の計算方法はコメント46に記載。
2023 F3A World Championship Day 5 Semi Finals Practice Australia
Thomas David選手本人のコメントもあります。
公平を期するため、試合ではフライトコーチは使いません。
準決勝で採用される点数の件で誤りがありました。
正しくは、
FAI Sporting Codeの、5.1.9. Classification、に記載があり、
予選分が1つのラウンドとしてカウントされます。
Fパターンの2ラウンドを加え、合計3つの中から上位の2つの合計が準決勝の得点となります。
---引用-------
5.1.9. Classification
a) 世界選手権および大陸選手権では、各競技者は 4 つの予備 (スケジュール P) フライトを行い、上位 3 つの正規化スコアが予備ランキングを決定するためにカウントされます。 上位半分の参加者は 30 名以下で、既知の決勝スケジュールに合わせて準決勝 2 便が追加で運航されます。 準決勝出場者の予選フライトの上位 3 回の合計 (再び 1000 ポイントに正規化) が 1 スコアとしてカウントされ、準決勝の 2 スコアと合わせて 3 つのスコアが得られ、上位 2 つが準決勝の分類にカウントされます。
2023 F3A World Championship Inglewood Practice Interviews
25日の準決勝飛行順
大元はこちら
2023 F3A World Championship Day 4 Australia
Aeromodelismo F3A Colombia - Otro punto de vista.
世界選手権での審査がどの様に行われているのか、良くわかります。
24日は予備日で、25日には、予選を勝ち抜いた30名で準決勝が行われ、演技種目はF-23となります。
トップの選手です。
予選の結果

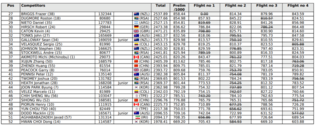

詳しくはこちら
こんばんは。どこの国のパイロットですか?
尚、現在トップを走っている選手がフライトコーチを利用しているかどうかなど分かりませんが、何もしていない段階で既にこの様なフライトを行っていたのですから、驚きしかありません。
予選最終日のフライト順。

この後で上位30名が準決勝に進みます。
予選の点数は考慮されず、また新たなスタートとなります。
演技が決勝用のパターンとなるので、審査員の打ち合わせも行われます。
テンプレートを再度掲載しますが、絶えず見比べてください。
予選パターンも今日までです。
F3A P-23 Template FCJudge
F3A world championship 2023 Australia day3 Jason Schulman line 1
Aeromodelismo F3A Colombia - Otro punto de vista.
審査員もまた審査される対象でもあるので、中々大変な仕事です。
2023 F3A World Championship Australia Day 2 Line 2 Jason Shulman
2023 F3A World Championship Australia Day 2 Line one, Yuhei Suzuki
得点表です。

自分でも採点練習してみましたが、動画だけでは情報不足のため、甘い点数になってしまいます。
どんなところを減点するのかは、1人の審査員のブログAeromodelismo F3A Colombia - Otro punto de vista.にも記されている通りです。
羽根田 予選Day2
リンク集で紹介したコロンビアの2人のブログ。
審査員と選手という違った立場での体験を通して大会の緊張感が伝わってきます。
Aeromodelismo F3A Colombia - Otro punto de vista.
Acrobacia de Precisión FAI F3A
2日目までの結果
https://f3a.com.au/2023wch/preliminary-results/
denkadoさま
ありがとうございます。
色々と使いこなせるよう頑張ってみます!
投稿ありがとうございます。
センター等の位置どりに気をつけているのが、良いと思います。
フライトコーチにはいろんな機能があるので、試してみてください。
飛行機を初めて半年の笠原と申します。
この度大会へ向けての練習でフライトコーチ導入をさせて頂きました。
先月、広島の大会ではナービスクラスで参加。
来月は高知の大会でスポーツマンクラスへエントリーしています。
真っ直ぐに飛ばすのも難しい操縦レベルで、尚且つ独学ですが、しっかり活用して頑張りたいと思いますので宜しくお願い致します。
本登録について。
Live Scoresは、青色のNOTAUMATiCアイコンをクリックでした。


その後、Menuから進みます。
得点をクリックすると、採点の詳細が見られます。

Live Webcam
Line2だけがやっと見られる様になりました。
選手が練習するのと同じ様に、審査員も集まって基準統一を図ります。
ライブで見られる予定
Live Webcam
Live Scores
20日、1ラウンド目の飛行順
開会式
今日の状況。
コメント14の動画と全く同じで、時々瞬間的にノイズ発生。
この程度では、フライトしていても全く異常は感じないので、トラブルが起こるとすればもっと違った状況の時なのでしょう。
世界選手権の様な大会でも毎回トラブルは発生していて、今回も有名選手が原因不明で機体を失いましたが、空ものRCの一番難しいところでもあります。
本日19日に公式練習と開会式が行われ、明日20日から競技開始となります。

大会の様子は、
コロンビアのMarcelo Velez選手のブログAcrobacia de Precisión FAI F3Aや、
審査員の1人、Patrick De WaegenaereさんのブログAeromodelismo F3A Colombia - Otro punto de vista.
でも見ることができます。
練習飛行
Thomas P23 in Australia