テンプレートを使う時、1つ1つの演技で区切って細かく調べるのも大切ですが、複数の演技をつなげて比べる事も大事です。 特に、演技の大きさについては、何故その大きさになるのかといった、新しい発見があるかもしれません。 テンプレートだけが唯一の正解ではありませんが、色々なヒントが含まれているので、こういった機能を利用してみるのも良いものです。
一方、テンプレートではありませんが、画像で使ったフライトはこちらにアップしてあるので、ダウンロードして保存すればOpen JSON2で使うことができます。 自分と違うリズム感の演技と比べてみるのも面白い事です。
今日は全国的に強風の様ですね。 フライトに行けないので、ちょっとターンの様子を纏めてみました。 P23の直前ですが、どんな感じの進入をしているかが良く分かります。
基本ルールに「15°につき1点減点」というのがあって、今は0.5点も使うので、ピッチのズレによる減点は、 7.5°までが0.5点の減点、7.5°〜15°までが1点の減点という事になります。
時計の長針の5分が30°です。(2点の減点) 1分なら6°(0.5点の減点) 2分なら12°(1点の減点)
今月の26日には九州でF3A研究会が開かれたり、その後も各地区で同様の事が行わます。 九州では昨年、フライトコーチが使われていましたが、今回もその予定があるそうなので、水平飛行の確認などに利用されるのか、ちょっと期待しているところです。 中部地区 関西地区
前向きなお考え、ありがとうございます。 要はやってみる事です。 気軽にお願いします。
発表会ですか。 確かにそれが、励みと刺激になりますね。
少し、恥ずかしい気持ちもありますが、定期的にアップロード。 先輩方のご助言をいただくことが可能でしたら、一人で悩むより、早く進歩できるのかもしれません。
まずは、一月後、基本の水平飛行・背面水平飛行・垂直の上昇と降下などをアップロードします。 その節は、宜しくおねがいします。
リボン図が見られた様で良かったです。 長年染みついた癖は中々抜けないものですが、練習を続けてみましょう。 それと、練習に於いて大切な事は発表する事です。 習い事では、必ずと言って良いくらい発表会があります。 この掲示板をそういう目的に利用して頂ければと思っています。
2本目のリボン表示出来ました。 ありがとうございます。
現状ですが、改めて自分の飛行軌跡を見るにあたり、 水平飛行・背面飛行・垂直上昇・垂直下降の未熟さを思い知っています。 基本に戻り、この部分の集中練習を取り入れて、前回の飛行と今回の飛行を見比べて修正するようにし始めました。 ただ、実際の飛行では、なかなか困難ですよね。 頑張ります。
2023年F3A世界選手権のサイトではジャッジも紹介されています。 日本のジャッジも入っていますね。 伺ったところ、フライトコーチの経験もおありだそうです。
ありがとうございます。 返信遅れてすみません。 やってみます。
「Open JSON2」ボタンを押して、自分で作って(又はネットで手に入れるなどして)保存しておいたJSONファイルを開くだけとなります。 JSONファイルは事前に用意しておかなければなりません。 その作り方は、通常通りプロッタでリボン図を閲覧している時に「Save JSON」ボタンを押してください。 すると、JSONファイルが自動的に作成され、PCなどのダウンロードフォルダーに保存される事になります。 JSONファイルの作り方はこちらの動画のラスト部分にあります。
こんにちは
基本的な質問ですいません。
2本目のリボンを同時に表示させる具体的な手順が、良く判りません。 申し訳ありませんが、ご教示頂けますでしょうか?
TDさんのP23があったので、自分のと比べてみました。
並べて見ると、どんなリズムで演技をこなしているのかが分かります。
2023年F3A世界選手権はオーストラリアのWarwick(ウォリック/ワーウィック)で8月19~26日に開催されます。 2023 FAI F3A WORLD CHAMPIONSHIP
会場となる実機飛行場がFCMapにも載っていました。
競技で飛行分析機能を使うのは禁止されていますが、それ以外の場面ではどうなのでしょうか。
飛行場を登録しておけばBINファイルを開く時に自動的に飛行場が表示され便利ですが、登録していない場所に行った場合は自分でパイロット位置などの緯度経度(10進表記)を入力しなければなりません。
もしそれが面倒で、とりあえずデータの成否を確認したいというのであれば、次の様な方法があります。 (コメント14と重複する所があります)
マイクロSDカードのLOGSの中から、見たいフライトのBINファイルを選びます。
Schduleは「P23」を指定して、飛行場所は「manual」を選びます。
「manual」になると「Copy Origin」ボタンが現れるので、それを押すと表示中の緯度経度が全て同じになります。
Submitを押すとリボン図が表示されます。
方角が指定されていないので演技面が合っていませんが、一応フライトの確認はできます。
3D画面は、マウスやキーの組み合わせ操作で視点を変えられるので、機種毎の動かし方を調べておく必要があります。
尚、パイロットやセンター位置の緯度経度を調べるのは、FCMapを使うと便利です。 また、飛行場登録はこのSite Formを使って申請しますが、1日ほどで本登録してもらえます。
(つづき) 下図は、Primary GPS(青)、Secondary GPS(緑)、ブレンドされたGPS(黄)そして最終的なPOS(赤)から出力された飛行軌跡を比較して示しています。このように、機体内のほとんど同じ位置に設置してあるGPSでも機体の姿勢によって測定位置にズレが生じています。 下図は、POSからのフライトデータをGoogle Earth上に表示したもので、各マークや表示文字の意味するところは以前説明したとおりです。フライトパス上の白い四角マークはPrimary GPSの衛星捕捉数が12未満となる位置を表していますが、前述の通り今回のフライトでは衛星捕捉数は9個以上となります。白い四角マークとフライトパスが少しずれているところもありますが、これは四角マークはPrimary GPSの位置であり、フライトパスはPOSの位置であるためです。衛星捕捉数が少なくなるときの機体姿勢は、ほとんどが背面あるいは垂直上昇の姿勢で、これはGPSアンテナを1個搭載した場合と同じ傾向です。 以上の解析結果から、GPSアンテナを2つ上向きで並べて配置し"GPS Blending"機能を使用した場合、衛星捕捉数が9個以上、HDopが2.0(m)以下であれば、両GPSのデータが両者の測定精度にしたがって滑らかにブレンドされ、最終的に出力される飛行軌跡もジャンプすることなく滑らかに両GPSの測定位置間を移動することが分かりました。
今回も前回と同様に、GPSアンテナを2つ上向きで並べて配置し、"GPS Blending"機能を使用してGPSエラー発生の有無を調べました。フライト回数を重ねるにつれて、システムの学習機能が効いているせいなのか、小さなジャンプも含めGPSによるエラーが少なくなっているように感じます。今回のフライトでは衛星捕捉数の最小値は9個、HDopの最大値は1.92(m)で、小さなジャンプやスライドも含めGPSによるエラーと思われるものは見当たりませんでした。 下図は、Primary GPSのHDopと、Primary及びSecondary GPSの間の測定位置のズレDifference(m)の関係を示しています。HDopが大きくなる(測定精度が悪くなる)とズレも大きくなることが分かります。今回のフライトではズレの最大値は約25(m)でした。 下図は、Primary及びSecondary GPSの衛星捕捉数の平均値と、両者間の測定位置のズレの関係を示しています。衛星捕捉数が減少すると両GPS間のズレは大きくなります。このように、ジャンプやスライドといった明らかに分かるGPSエラーが無い場合でも、衛星捕捉数が減少しHDopの値が大きくなった場合にはGPSの測定位置に誤差が生じている可能性があることを認識しておく必要があります。 下図は、両GPSの衛星捕捉数の平均値とそれらの間の測定位置のズレに対するデータ数のHeatmap図です。図中の数値はデータ数を表しており、データ総数は1769個です。今回のフライトではほとんどのデータは右下、つまりNSatsで14個以上、ズレで7(m)以下の領域に集まっています。 下図は、両GPS、ブレンドされたGPSそしてカルマンフィルターを通して最終的に出力されるPOS(Plotterで使用されるデータ)からの緯度、経度およびHDopの値を経過時間timeUS(sec)で表しています。POSデータ(オレンジ)は、Primary GPSのHDop(赤)が大きくなるとPrimary GPSからの出力データ(赤)から離れSecondary GPSからの出力データ(緑)に近づき、Secondary GPSのHDop(緑)が大きくなると今度はSecondary GPSからPrimary GPSのデータに近づくことが分かります。このように、両GPSの出力データ間をジャンプすることなく滑らかに移動しています。
トピックP-23.07 Roll Combinationで、動画を使いました。 それと、YouTube動画をこのコメント欄に貼り付けるのは、記入枠の下にあるマーク一覧の中から「フィルムマーク」をクリックして、動画のURLを記入すると完了します。
別のミュゼットの動画です。
230205本日の切り替えしロールです (https://youtu.be/at8TWi9FzT8)
舵を戻す事が重要ポイントです。 動画の9:03や9:06を見てください。 エレベーターを引いたまま、エルロンを打つのではありません。 5度ヘッドアップさせた瞬間にはエレベーターはニュートラルです。
10度というのは初級トレーニング用です。 そして、この5度というのはフライトコーチの姿勢グラフでは確認できるのですが、肉眼では恐らく見えない量です。
また、「ヘッドアップなど要らないよ」と言われる場合の飛行は、単に降下ロールを行なっているだけに過ぎないのです。
昨年9月以降に作って保存しておいたjsonファイルが、v3.2.2Hのプロッターで開けなくなってしまいましたが、 その開示方法を教えていただきました。 https://zawazawa.jp/flightcoach/topic/5/3
大きさの異なる機体のリボン図を同時に表示してみます。 まずは、70クラス機とミュゼット 次は、フルサイズ機とミュゼット こうする事で練習の課題が見えて来ます。 ・パートループ(部分宙返り)を描いている時のRは一定。 ・1つの演技内でのRは同一。 ・ロールの前後にはラインが必要で、その長さは同一。(インメルマンを除く)
なるほど。やってみたら上手くいきました。 助かりました。 ありがとうございます。
Plotterの(v3.2.2H)は、"version": "1.3"のjsonファイルが「Open JSON」で開けなくなったようですね。 jsonファイルをエディタで開き、一行目の"version": "1.3",を"version": "1.2",に書き換えたら開けました。 その後「Save JSON」で保存し直すと"version": "1.3"に戻りますが、「Open JSON」でも開けました。
最後は「赤→ロール」についてです。 水平飛行に於いては、Leftビューを見れば、 「水平面に対して左に傾斜が+」 「水平面に対して右に傾斜がー」と、なっている事がわかります。 ・ ・ ただ、垂直やクロス方向に飛行する時は、Leftビューではロールが見えないので、その時はTopビューやFrontビューを見ることになります。
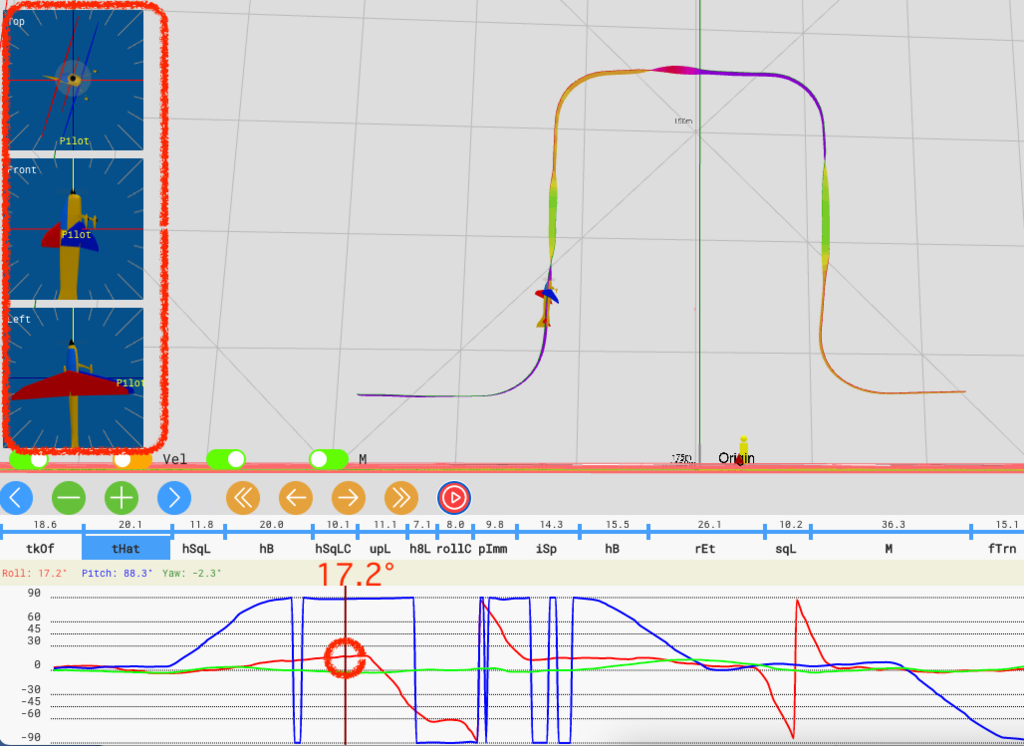
・ ・ さて、そうこうしているうちに疑問点が出て来てしまいました。 それは水平ターンをしている時の赤線の変化です。 私の今の考えではオレンジ(2カ所)の様なグラフになると思うのですが、 何故か実際は赤線の様になっているのです。 この赤線はなぜ途中から反対側にロールする様になるのでしょう。 他にもファイターターンなどでも見られる現象なので、興味を持たれた方は調べてみてください。
1月22日、トップビュー画像を一枚追加。
今回もGPSアンテナを2つ上向きで並べて配置し、"GPS Blending"機能を使用してGPSエラー発生の有無を調べました。下図はLogファイルのPOSデータをGoogle Earth上に表示させたもので、各マヌーバを色分けして表示してあります。飛行機のアイコンはその位置における機体の姿勢を示しており、赤は機体の上面を、青は下面を表しています。フライトパス上の白い四角マークはPrimary GPSユニットにより補足された衛星の数が12未満となる位置を表しています。前回の同様の配置でフライトしたときと比べて大きなジャンプは無くなりましたが、下図の矢印で示すような小さなジャンプは未だ残っています。今回大きなジャンプが無くなったのは、GPSユニットの学習機能が働いたせいでしょうか。 各GPSユニットから出力された緯度データを比較すると、下図のようになります。前回と同様、赤がPrimary、緑がSecondary、青がBlended GPSを表しており、ベージュがPOSデータであり、カルマンフィルターを通して最終的に出力される緯度データで、Plotterで描画するときに用いられるデータです。黄色い縦線はPrimary GPSのNSatsが0となり、HDopが99.99となる位置を示しています。 Primary GPSの測定精度が大きく悪化し、Blendする際のPrimaryとSecondaryの出力データの重みが変化したときの前後でジャンプが発生する様子が分かります。赤い矢印のジャンプの幅は距離に換算すると9.61mです。 カーボン製キャノピーやモーター周りにカーボン部材を使用しているにもかかわらず、GPSアンテナが1つの場合に見られた大きなジャンプは、2つのGPSユニットを用いた"GPS Blending"機能を用いることによってほとんど見られなくなりました。ただし、小さなジャンプは未だ残っており、"GPS Blending"機能について更なる調査が必要です。
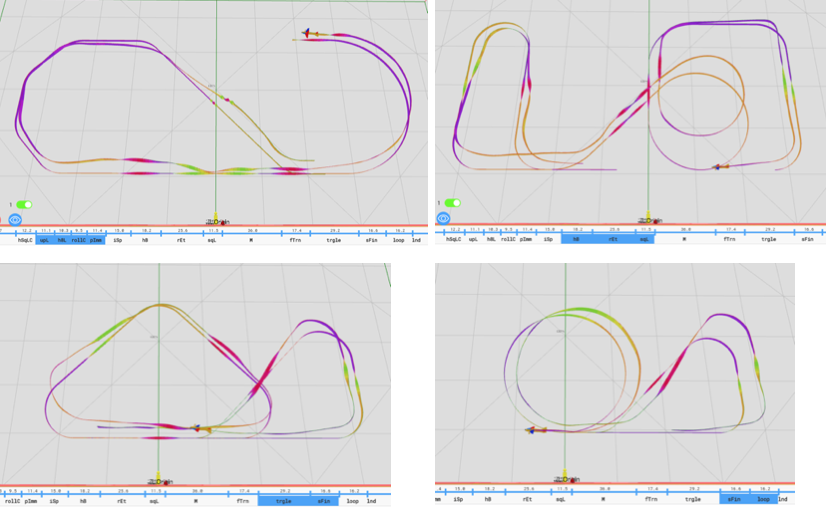
次は2段目のFrontビューと「青→ピッチ」の関係を見てみます。 Frontビューは、 機体をパイロット側の面から見たもので、視点は機体と同位置・同高度です。 ピッチと言っても機体のエレベーター方向の話ではありません。 上記「ヨー」と同じく飛行演技面における機体の見え方の話です。 要は、ノーズが画面上で上下方向のどこを向いているかということです。 ここでのピッチは水平線に対する上下だけでなく、垂直線に対しての左右も関係するので、+ーは画像の様に90度毎に区分けされています。
例えば、次の画像にあるターンですが、ノーズが向こう正面を向く前後で、+ーが反転しています。 これは、ヘッドアップしている状態で旋回している為、Frontビューからすれば角度が変化して見えるということです。 ターン時のピッチグラフはヨーと組み合わせてこういう形になるので、これを覚えておくと、グラフの右端にも別のターンがあるのがすぐに分かる様になります。
姿勢の数値を元にして作られているのが、プロッター画面左側にある3つの小さな画面です。
一番上の「トップビュー」は機体を真上(ヨー軸)から見た姿で、グラフの「緑→ヨー」に関連しているので分かり易いと思います。 ただ、ヨーといっても、ここでは機体のラダーに関する話ではありません。 演技面に対して胴体がどちらを向いているかという話です。 ピッチやロールは関係ありません。 単純に、「翼の無い胴体がどちらを向いているか」と考えると分かり易くなります。 翼は関係ないので、正面も背面もナイフエッジもありません。 演技面に対するノーズの方向(位置)によって+ーが決められています。 その+ーは、実例を見ると、手前方向が+ 奥方向がーとなっているのが分かります。
ネット上にあったFTさんのP23パターン。 了解を得てアップします。
(つづき) 2つのGPSアンテナを共に上向きで並べて配置したときの、GPSの測定精度を示す各パラメータは下記の通りとなりました。 【GPS Blending】 [Primary] NSats: 0(min.)~19.91(average)~23(max.) HDop: 0.54~0.64~99.99 [Secondary] NSats: 12~19.87~23 HDop: 0.54~0.58~0.83 [Blended] NSats: 13~20.50~23 HDop: 0.54~0.57~0.81 XKF4_SV: 0~0.24~3.63 XKF4_SP: 0~0.19~3.92 XKF4_SM: 0~0.25~0.57 2つのGPSアンテナを上向きと下向きに分けた場合と比較すると、今回の共に上向きで並べて配置した場合の方がGPSの測定精度は、一部のパラメータを除き明らかに良くなっています。
GPSアンテナを2つ用いたフライトについて、前回は2つのGPSアンテナを上向きと下向きに配置しましたが、今回は共に上向きで両者並べて配置しました。まず、前回と同様緯度データは下図のようになりました。 前回の、2つのGPSアンテナを上向きと下向きに分けた場合に比較して、今回はほとんどのデータがPrimary(赤)とSecondry(緑)及びBlended(青)で一致しており、POS(ベージュ)のデータも当然ながらそれらと一致しています。但し、一カ所Primary,Secondary及びBlendedの緯度データがばらついている箇所があります。この部分を拡大したのが下図です。 カルマンフィルターを通した最終的な出力であるPOSの値(Flight Coachで使用)もこれら3つの値から大きく異なっています。その後POSの値はステップ状に上昇し、3つの値に近づきます。何故POSの値がこのような変化をするのかは不明です。フライトパスにもこの症状がはっきりと現れています。下図で示すように、背面になった辺りから機体の姿勢が示す方向とフライトパスがずれ始め、最終的に赤矢印のところでステップ状に大きく変化して元のフライトパスに戻っています。 "GPS Blending"機能を用いた場合のPOSデータの変化の挙動については、今後更に詳細に検討する必要がありそうです。
さすが本場。使用してますね。
Dual GPSによるGPSエラー低減の試み(つづき) 下の2つの図はLogファイルのPOSデータをGoogle Earth上に表示させたもので、各マヌーバを色分けして表示してあります。飛行機のアイコンはその位置における機体の姿勢を示しており、赤は機体の上面を、青は下面を表しています。フライトパス上の白い四角マークは補足されたGPS衛星の数が12未満(Ardupilotでは12以上を推奨)となる位置を表しており、最初の数値は衛星捕捉数NSatsを、次の数値はGPSによる水平方向の測定精度を示すHDop(Ardupilotでは2未満を推奨)を表しています。 上段の図は、GPSアンテナが1つの場合、下段の図はGPSアンテナが2つでGPS Blending機能を用いた場合を示しています。GPS Blending機能を用いた方が、エラーの起こる可能性を示す白い四角の数は少なく、エラーとなる確率が小さくなることが分かります。なお、NSatsが12未満となる回数は、GPSアンテナが1つの場合69回、2つの場合45回でした。また、GPSアンテナを2つ使用した下段の図で、NSatsの値が小さくなるのは垂直上昇の場合です。垂直上昇時は、Primary(上向き)及びSecondary(下向き) GPS共にカーボン製キャノピー並びにモーター周りのカーボン部材の直下にくるため、GPS衛星からの電波が遮断されるためと思われます。
オーストラリアでは2023年度の競技会が始まりますが、その練習風景との事です。 10:35には、フライトコーチも映っています。
サウジアラビア・リヤドの飛行場。 日本とはスケールが違い過ぎです。
Extreme Flight Extra 300 91" V1 Low and Slow 3D Flight First Record of 2023 IMAC Unlimited 2023 Known http://planes.be-steam.com/home
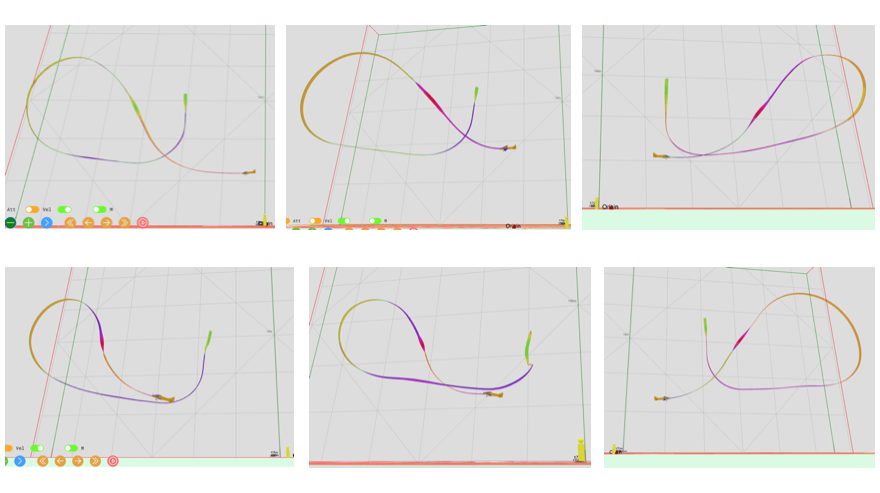
インメルマンターンでのバンピング
ミュゼットでのインメルマンターンです。 ピッチとロールのグラフを見ると、どんな操作をしているのかが分かってきます。
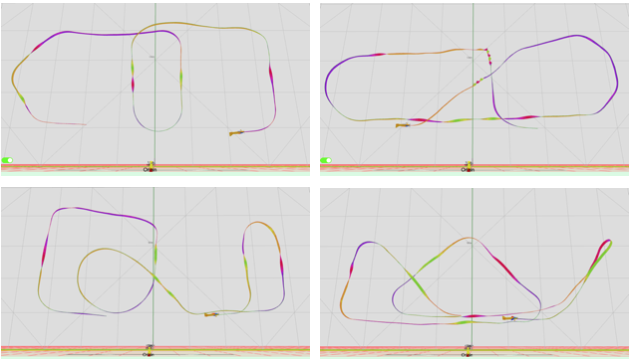
こちらはTUさんのP23パターン
GFTOさんのミュゼットでのP23 125mコースの大きな演技なので、滑らかさがあります。

テンプレートを使う時、1つ1つの演技で区切って細かく調べるのも大切ですが、複数の演技をつなげて比べる事も大事です。
特に、演技の大きさについては、何故その大きさになるのかといった、新しい発見があるかもしれません。
テンプレートだけが唯一の正解ではありませんが、色々なヒントが含まれているので、こういった機能を利用してみるのも良いものです。
一方、テンプレートではありませんが、画像で使ったフライトはこちらにアップしてあるので、ダウンロードして保存すればOpen JSON2で使うことができます。
自分と違うリズム感の演技と比べてみるのも面白い事です。
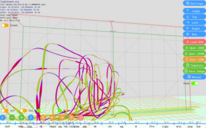
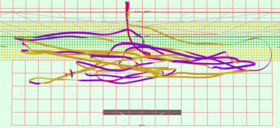
今日は全国的に強風の様ですね。
フライトに行けないので、ちょっとターンの様子を纏めてみました。
P23の直前ですが、どんな感じの進入をしているかが良く分かります。
基本ルールに「15°につき1点減点」というのがあって、今は0.5点も使うので、ピッチのズレによる減点は、
7.5°までが0.5点の減点、7.5°〜15°までが1点の減点という事になります。
時計の長針の5分が30°です。(2点の減点)
1分なら6°(0.5点の減点)
2分なら12°(1点の減点)
今月の26日には九州でF3A研究会が開かれたり、その後も各地区で同様の事が行わます。
九州では昨年、フライトコーチが使われていましたが、今回もその予定があるそうなので、水平飛行の確認などに利用されるのか、ちょっと期待しているところです。
中部地区
関西地区
前向きなお考え、ありがとうございます。
要はやってみる事です。
気軽にお願いします。
発表会ですか。
確かにそれが、励みと刺激になりますね。
少し、恥ずかしい気持ちもありますが、定期的にアップロード。
先輩方のご助言をいただくことが可能でしたら、一人で悩むより、早く進歩できるのかもしれません。
まずは、一月後、基本の水平飛行・背面水平飛行・垂直の上昇と降下などをアップロードします。
その節は、宜しくおねがいします。
リボン図が見られた様で良かったです。
長年染みついた癖は中々抜けないものですが、練習を続けてみましょう。
それと、練習に於いて大切な事は発表する事です。
習い事では、必ずと言って良いくらい発表会があります。
この掲示板をそういう目的に利用して頂ければと思っています。
2本目のリボン表示出来ました。
ありがとうございます。
現状ですが、改めて自分の飛行軌跡を見るにあたり、
水平飛行・背面飛行・垂直上昇・垂直下降の未熟さを思い知っています。
基本に戻り、この部分の集中練習を取り入れて、前回の飛行と今回の飛行を見比べて修正するようにし始めました。
ただ、実際の飛行では、なかなか困難ですよね。
頑張ります。
2023年F3A世界選手権のサイトではジャッジも紹介されています。
日本のジャッジも入っていますね。
伺ったところ、フライトコーチの経験もおありだそうです。
ありがとうございます。
返信遅れてすみません。
やってみます。
「Open JSON2」ボタンを押して、自分で作って(又はネットで手に入れるなどして)保存しておいたJSONファイルを開くだけとなります。
JSONファイルは事前に用意しておかなければなりません。
その作り方は、通常通りプロッタでリボン図を閲覧している時に「Save JSON」ボタンを押してください。
すると、JSONファイルが自動的に作成され、PCなどのダウンロードフォルダーに保存される事になります。
JSONファイルの作り方はこちらの動画のラスト部分にあります。
こんにちは
基本的な質問ですいません。
2本目のリボンを同時に表示させる具体的な手順が、良く判りません。
申し訳ありませんが、ご教示頂けますでしょうか?
TDさんのP23があったので、自分のと比べてみました。
並べて見ると、どんなリズムで演技をこなしているのかが分かります。
2023年F3A世界選手権はオーストラリアのWarwick(ウォリック/ワーウィック)で8月19~26日に開催されます。
2023 FAI F3A WORLD CHAMPIONSHIP
会場となる実機飛行場がFCMapにも載っていました。

競技で飛行分析機能を使うのは禁止されていますが、それ以外の場面ではどうなのでしょうか。
飛行場を登録しておけばBINファイルを開く時に自動的に飛行場が表示され便利ですが、登録していない場所に行った場合は自分でパイロット位置などの緯度経度(10進表記)を入力しなければなりません。
もしそれが面倒で、とりあえずデータの成否を確認したいというのであれば、次の様な方法があります。
(コメント14と重複する所があります)
マイクロSDカードのLOGSの中から、見たいフライトのBINファイルを選びます。
Schduleは「P23」を指定して、飛行場所は「manual」を選びます。

「manual」になると「Copy Origin」ボタンが現れるので、それを押すと表示中の緯度経度が全て同じになります。

Submitを押すとリボン図が表示されます。
方角が指定されていないので演技面が合っていませんが、一応フライトの確認はできます。
3D画面は、マウスやキーの組み合わせ操作で視点を変えられるので、機種毎の動かし方を調べておく必要があります。
尚、パイロットやセンター位置の緯度経度を調べるのは、FCMapを使うと便利です。
また、飛行場登録はこのSite Formを使って申請しますが、1日ほどで本登録してもらえます。
(つづき)
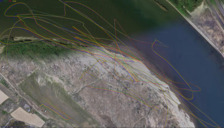
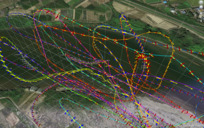
下図は、Primary GPS(青)、Secondary GPS(緑)、ブレンドされたGPS(黄)そして最終的なPOS(赤)から出力された飛行軌跡を比較して示しています。このように、機体内のほとんど同じ位置に設置してあるGPSでも機体の姿勢によって測定位置にズレが生じています。
下図は、POSからのフライトデータをGoogle Earth上に表示したもので、各マークや表示文字の意味するところは以前説明したとおりです。フライトパス上の白い四角マークはPrimary GPSの衛星捕捉数が12未満となる位置を表していますが、前述の通り今回のフライトでは衛星捕捉数は9個以上となります。白い四角マークとフライトパスが少しずれているところもありますが、これは四角マークはPrimary GPSの位置であり、フライトパスはPOSの位置であるためです。衛星捕捉数が少なくなるときの機体姿勢は、ほとんどが背面あるいは垂直上昇の姿勢で、これはGPSアンテナを1個搭載した場合と同じ傾向です。
以上の解析結果から、GPSアンテナを2つ上向きで並べて配置し"GPS Blending"機能を使用した場合、衛星捕捉数が9個以上、HDopが2.0(m)以下であれば、両GPSのデータが両者の測定精度にしたがって滑らかにブレンドされ、最終的に出力される飛行軌跡もジャンプすることなく滑らかに両GPSの測定位置間を移動することが分かりました。
今回も前回と同様に、GPSアンテナを2つ上向きで並べて配置し、"GPS Blending"機能を使用してGPSエラー発生の有無を調べました。フライト回数を重ねるにつれて、システムの学習機能が効いているせいなのか、小さなジャンプも含めGPSによるエラーが少なくなっているように感じます。今回のフライトでは衛星捕捉数の最小値は9個、HDopの最大値は1.92(m)で、小さなジャンプやスライドも含めGPSによるエラーと思われるものは見当たりませんでした。

下図は、Primary GPSのHDopと、Primary及びSecondary GPSの間の測定位置のズレDifference(m)の関係を示しています。HDopが大きくなる(測定精度が悪くなる)とズレも大きくなることが分かります。今回のフライトではズレの最大値は約25(m)でした。
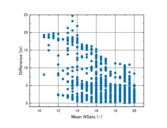
下図は、Primary及びSecondary GPSの衛星捕捉数の平均値と、両者間の測定位置のズレの関係を示しています。衛星捕捉数が減少すると両GPS間のズレは大きくなります。このように、ジャンプやスライドといった明らかに分かるGPSエラーが無い場合でも、衛星捕捉数が減少しHDopの値が大きくなった場合にはGPSの測定位置に誤差が生じている可能性があることを認識しておく必要があります。
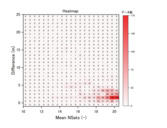
下図は、両GPSの衛星捕捉数の平均値とそれらの間の測定位置のズレに対するデータ数のHeatmap図です。図中の数値はデータ数を表しており、データ総数は1769個です。今回のフライトではほとんどのデータは右下、つまりNSatsで14個以上、ズレで7(m)以下の領域に集まっています。
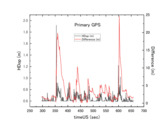
下図は、両GPS、ブレンドされたGPSそしてカルマンフィルターを通して最終的に出力されるPOS(Plotterで使用されるデータ)からの緯度、経度およびHDopの値を経過時間timeUS(sec)で表しています。POSデータ(オレンジ)は、Primary GPSのHDop(赤)が大きくなるとPrimary GPSからの出力データ(赤)から離れSecondary GPSからの出力データ(緑)に近づき、Secondary GPSのHDop(緑)が大きくなると今度はSecondary GPSからPrimary GPSのデータに近づくことが分かります。このように、両GPSの出力データ間をジャンプすることなく滑らかに移動しています。
トピックP-23.07 Roll Combinationで、動画を使いました。
それと、YouTube動画をこのコメント欄に貼り付けるのは、記入枠の下にあるマーク一覧の中から「フィルムマーク」をクリックして、動画のURLを記入すると完了します。
別のミュゼットの動画です。
水平ロールでは多くの場合、開始時の水平が頭下げで、そのまま降下ロールとなっています。
高性能パターン機でもそうですから、小型で反応の速い機体を水平に飛ばすのは更に難しいですが、その分、練習になるかもしれません。
230205本日の切り替えしロールです
(https://youtu.be/at8TWi9FzT8)
舵を戻す事が重要ポイントです。
動画の9:03や9:06を見てください。
エレベーターを引いたまま、エルロンを打つのではありません。
5度ヘッドアップさせた瞬間にはエレベーターはニュートラルです。
10度というのは初級トレーニング用です。
そして、この5度というのはフライトコーチの姿勢グラフでは確認できるのですが、肉眼では恐らく見えない量です。
また、「ヘッドアップなど要らないよ」と言われる場合の飛行は、単に降下ロールを行なっているだけに過ぎないのです。
昨年9月以降に作って保存しておいたjsonファイルが、v3.2.2Hのプロッターで開けなくなってしまいましたが、
その開示方法を教えていただきました。
https://zawazawa.jp/flightcoach/topic/5/3
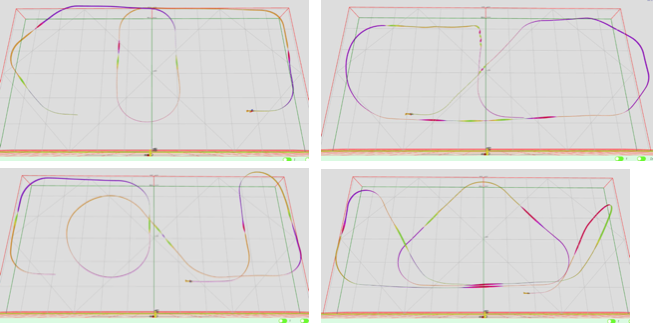
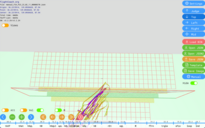
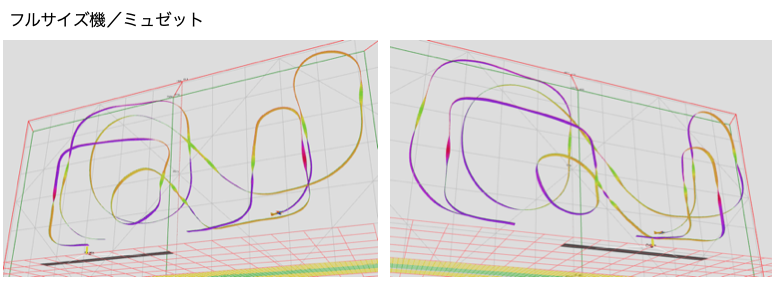
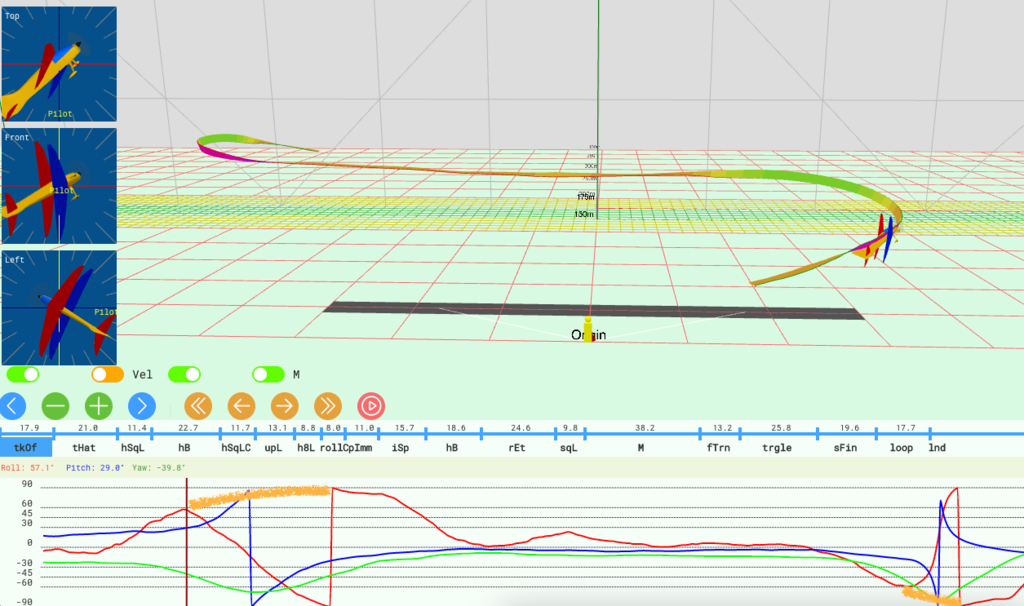
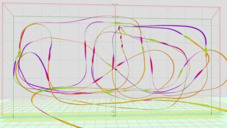
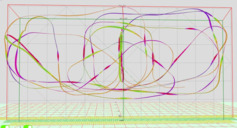
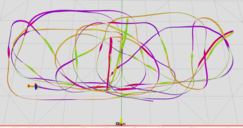
大きさの異なる機体のリボン図を同時に表示してみます。
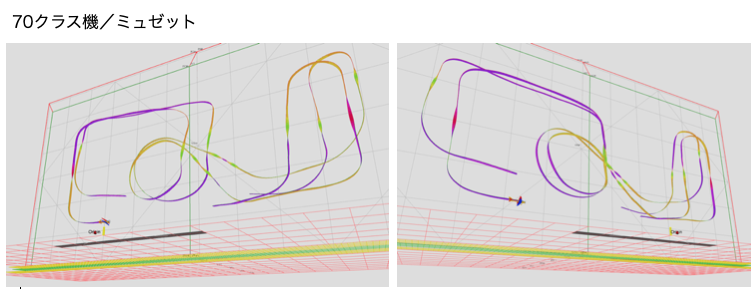
まずは、70クラス機とミュゼット
次は、フルサイズ機とミュゼット
こうする事で練習の課題が見えて来ます。
・パートループ(部分宙返り)を描いている時のRは一定。
・1つの演技内でのRは同一。
・ロールの前後にはラインが必要で、その長さは同一。(インメルマンを除く)
なるほど。やってみたら上手くいきました。
助かりました。
ありがとうございます。
Plotterの(v3.2.2H)は、"version": "1.3"のjsonファイルが「Open JSON」で開けなくなったようですね。
jsonファイルをエディタで開き、一行目の"version": "1.3",を"version": "1.2",に書き換えたら開けました。
その後「Save JSON」で保存し直すと"version": "1.3"に戻りますが、「Open JSON」でも開けました。
最後は「赤→ロール」についてです。
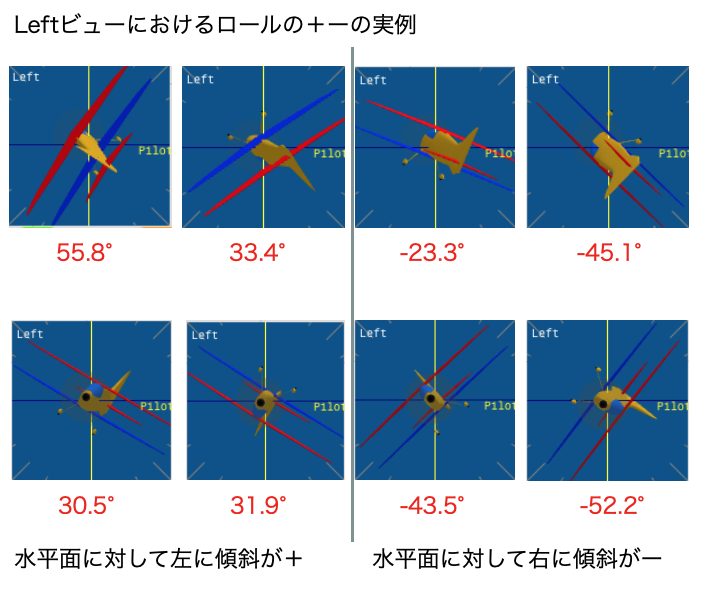
水平飛行に於いては、Leftビューを見れば、
「水平面に対して左に傾斜が+」
「水平面に対して右に傾斜がー」と、なっている事がわかります。
・
・
ただ、垂直やクロス方向に飛行する時は、Leftビューではロールが見えないので、その時はTopビューやFrontビューを見ることになります。
・
・
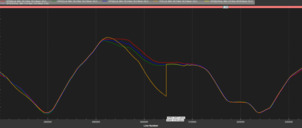
さて、そうこうしているうちに疑問点が出て来てしまいました。
それは水平ターンをしている時の赤線の変化です。
私の今の考えではオレンジ(2カ所)の様なグラフになると思うのですが、
何故か実際は赤線の様になっているのです。
この赤線はなぜ途中から反対側にロールする様になるのでしょう。
他にもファイターターンなどでも見られる現象なので、興味を持たれた方は調べてみてください。
1月22日、トップビュー画像を一枚追加。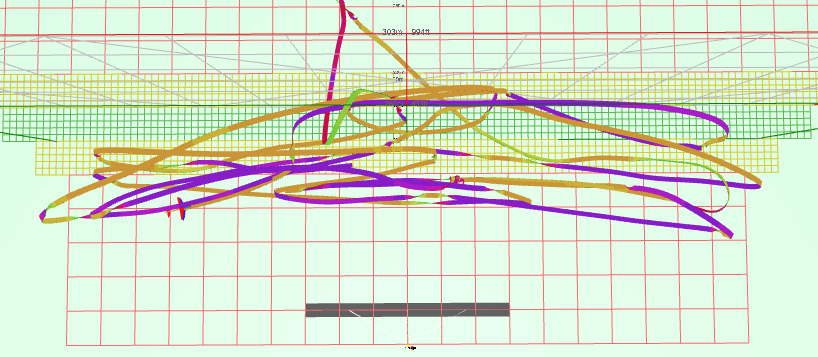
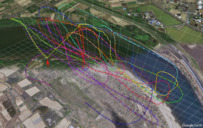
今回もGPSアンテナを2つ上向きで並べて配置し、"GPS Blending"機能を使用してGPSエラー発生の有無を調べました。下図はLogファイルのPOSデータをGoogle Earth上に表示させたもので、各マヌーバを色分けして表示してあります。飛行機のアイコンはその位置における機体の姿勢を示しており、赤は機体の上面を、青は下面を表しています。フライトパス上の白い四角マークはPrimary GPSユニットにより補足された衛星の数が12未満となる位置を表しています。前回の同様の配置でフライトしたときと比べて大きなジャンプは無くなりましたが、下図の矢印で示すような小さなジャンプは未だ残っています。今回大きなジャンプが無くなったのは、GPSユニットの学習機能が働いたせいでしょうか。

各GPSユニットから出力された緯度データを比較すると、下図のようになります。前回と同様、赤がPrimary、緑がSecondary、青がBlended GPSを表しており、ベージュがPOSデータであり、カルマンフィルターを通して最終的に出力される緯度データで、Plotterで描画するときに用いられるデータです。黄色い縦線はPrimary GPSのNSatsが0となり、HDopが99.99となる位置を示しています。
Primary GPSの測定精度が大きく悪化し、Blendする際のPrimaryとSecondaryの出力データの重みが変化したときの前後でジャンプが発生する様子が分かります。赤い矢印のジャンプの幅は距離に換算すると9.61mです。
カーボン製キャノピーやモーター周りにカーボン部材を使用しているにもかかわらず、GPSアンテナが1つの場合に見られた大きなジャンプは、2つのGPSユニットを用いた"GPS Blending"機能を用いることによってほとんど見られなくなりました。ただし、小さなジャンプは未だ残っており、"GPS Blending"機能について更なる調査が必要です。
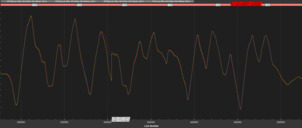
次は2段目のFrontビューと「青→ピッチ」の関係を見てみます。
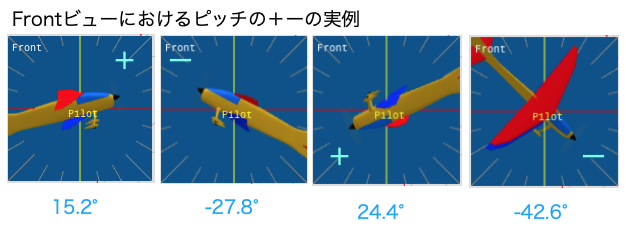
Frontビューは、 機体をパイロット側の面から見たもので、視点は機体と同位置・同高度です。
ピッチと言っても機体のエレベーター方向の話ではありません。
上記「ヨー」と同じく飛行演技面における機体の見え方の話です。
要は、ノーズが画面上で上下方向のどこを向いているかということです。
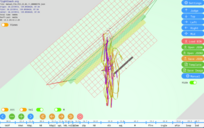
ここでのピッチは水平線に対する上下だけでなく、垂直線に対しての左右も関係するので、+ーは画像の様に90度毎に区分けされています。
例えば、次の画像にあるターンですが、ノーズが向こう正面を向く前後で、+ーが反転しています。
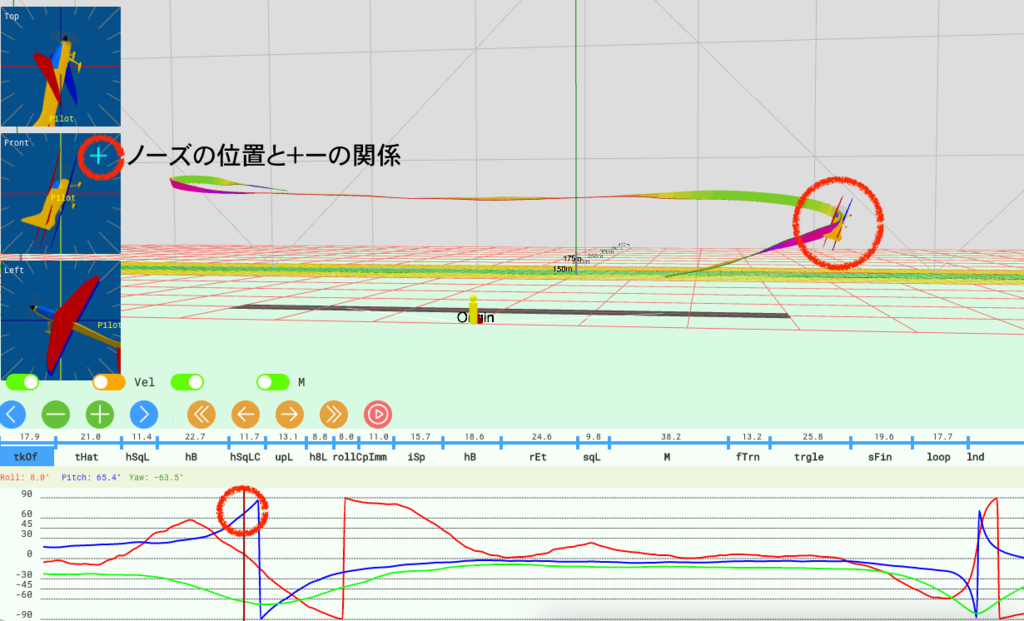
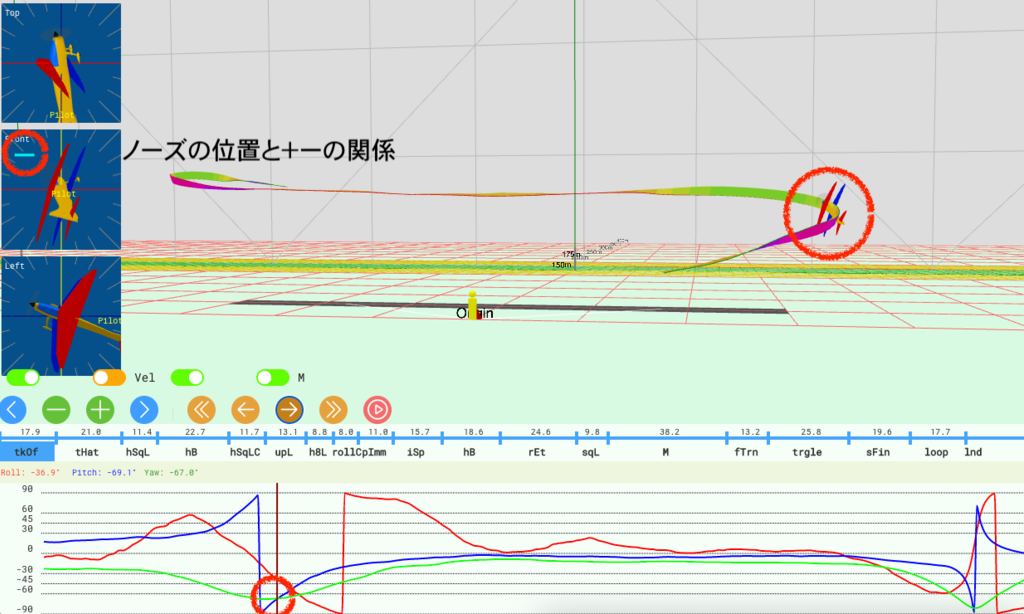
これは、ヘッドアップしている状態で旋回している為、Frontビューからすれば角度が変化して見えるということです。
ターン時のピッチグラフはヨーと組み合わせてこういう形になるので、これを覚えておくと、グラフの右端にも別のターンがあるのがすぐに分かる様になります。
姿勢の数値を元にして作られているのが、プロッター画面左側にある3つの小さな画面です。
一番上の「トップビュー」は機体を真上(ヨー軸)から見た姿で、グラフの「緑→ヨー」に関連しているので分かり易いと思います。
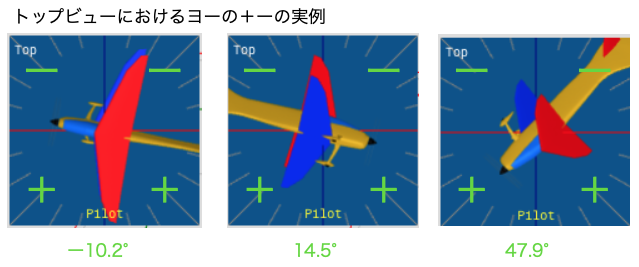
ただ、ヨーといっても、ここでは機体のラダーに関する話ではありません。
演技面に対して胴体がどちらを向いているかという話です。
ピッチやロールは関係ありません。
単純に、「翼の無い胴体がどちらを向いているか」と考えると分かり易くなります。
翼は関係ないので、正面も背面もナイフエッジもありません。
演技面に対するノーズの方向(位置)によって+ーが決められています。
その+ーは、実例を見ると、手前方向が+ 奥方向がーとなっているのが分かります。
ネット上にあったFTさんのP23パターン。
了解を得てアップします。
(つづき)
2つのGPSアンテナを共に上向きで並べて配置したときの、GPSの測定精度を示す各パラメータは下記の通りとなりました。
【GPS Blending】
[Primary]
NSats: 0(min.)~19.91(average)~23(max.)
HDop: 0.54~0.64~99.99
[Secondary]
NSats: 12~19.87~23
HDop: 0.54~0.58~0.83
[Blended]
NSats: 13~20.50~23
HDop: 0.54~0.57~0.81
XKF4_SV: 0~0.24~3.63
XKF4_SP: 0~0.19~3.92
XKF4_SM: 0~0.25~0.57
2つのGPSアンテナを上向きと下向きに分けた場合と比較すると、今回の共に上向きで並べて配置した場合の方がGPSの測定精度は、一部のパラメータを除き明らかに良くなっています。
GPSアンテナを2つ用いたフライトについて、前回は2つのGPSアンテナを上向きと下向きに配置しましたが、今回は共に上向きで両者並べて配置しました。まず、前回と同様緯度データは下図のようになりました。
前回の、2つのGPSアンテナを上向きと下向きに分けた場合に比較して、今回はほとんどのデータがPrimary(赤)とSecondry(緑)及びBlended(青)で一致しており、POS(ベージュ)のデータも当然ながらそれらと一致しています。但し、一カ所Primary,Secondary及びBlendedの緯度データがばらついている箇所があります。この部分を拡大したのが下図です。
カルマンフィルターを通した最終的な出力であるPOSの値(Flight Coachで使用)もこれら3つの値から大きく異なっています。その後POSの値はステップ状に上昇し、3つの値に近づきます。何故POSの値がこのような変化をするのかは不明です。フライトパスにもこの症状がはっきりと現れています。下図で示すように、背面になった辺りから機体の姿勢が示す方向とフライトパスがずれ始め、最終的に赤矢印のところでステップ状に大きく変化して元のフライトパスに戻っています。
"GPS Blending"機能を用いた場合のPOSデータの変化の挙動については、今後更に詳細に検討する必要がありそうです。
さすが本場。使用してますね。
Dual GPSによるGPSエラー低減の試み(つづき)

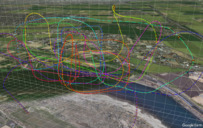
下の2つの図はLogファイルのPOSデータをGoogle Earth上に表示させたもので、各マヌーバを色分けして表示してあります。飛行機のアイコンはその位置における機体の姿勢を示しており、赤は機体の上面を、青は下面を表しています。フライトパス上の白い四角マークは補足されたGPS衛星の数が12未満(Ardupilotでは12以上を推奨)となる位置を表しており、最初の数値は衛星捕捉数NSatsを、次の数値はGPSによる水平方向の測定精度を示すHDop(Ardupilotでは2未満を推奨)を表しています。
上段の図は、GPSアンテナが1つの場合、下段の図はGPSアンテナが2つでGPS Blending機能を用いた場合を示しています。GPS Blending機能を用いた方が、エラーの起こる可能性を示す白い四角の数は少なく、エラーとなる確率が小さくなることが分かります。なお、NSatsが12未満となる回数は、GPSアンテナが1つの場合69回、2つの場合45回でした。また、GPSアンテナを2つ使用した下段の図で、NSatsの値が小さくなるのは垂直上昇の場合です。垂直上昇時は、Primary(上向き)及びSecondary(下向き) GPS共にカーボン製キャノピー並びにモーター周りのカーボン部材の直下にくるため、GPS衛星からの電波が遮断されるためと思われます。
オーストラリアでは2023年度の競技会が始まりますが、その練習風景との事です。
10:35には、フライトコーチも映っています。
サウジアラビア・リヤドの飛行場。

日本とはスケールが違い過ぎです。
Extreme Flight Extra 300 91" V1 Low and Slow 3D Flight
First Record of 2023 IMAC Unlimited 2023 Known
http://planes.be-steam.com/home
インメルマンターンでのバンピング
ミュゼットでのインメルマンターンです。
ピッチとロールのグラフを見ると、どんな操作をしているのかが分かってきます。
こちらはTUさんのP23パターン
GFTOさんのミュゼットでのP23
125mコースの大きな演技なので、滑らかさがあります。