はじめまして、フライトコーチとArdupilotにハマっているgo3と申します。
「いつ飛行させたらいいの?」を解決する装置を作ったので紹介します。
FC側のソフトであるArdupilotにはGPSやコンパスなどの準備が整ったかをチェックする機能(ARMING_CHECK)が用意されていますが、
フライトコーチでは電源投入後の操作をしなくてもログが開始できるようにアーム操作不要(ARMING_REQUIRE=0)に設定されています。
この設定の場合はARMING_CHECKが働かず電源投入後数秒で強制アームとなりログ収集を開始し、その後GPSが衛星4個程度を受信すると3D-FIXとなりOrigin位置が記憶されます。
しかしこの段階では位置精度が十分ではなく記録されたOrigin位置が実際とずれていることが有ります。
フライトプロッタ―で表示させようとしたときに、"more than **m from the origin"となったり表示されたリボン図にセンターズレや高度ズレが生じるのはこのためだと思われます。
GPS、IMUなどの準備が整いEKFが動作開始(EKF3 active)した後にログを開始すればこの問題は解決するはずです。
ARMING_REQUIRE=1にしてARMING_CHECKを有効にすればよいのですが、以下のいずれかの方法でアーム指令を出す必要があります。

フライトコーチの初期動作確認では、地上を移動してその経路を表示させるという方法もあります。
やり方は、マイクロSDカードをセットして電源を入れ、ただ地上を歩き回るだけです。
最初の「数分間」は地上で静止して、GPSがロックされた合図(LEDの点滅変化)を待ちます。
ある程度待ってから、適当に歩き回ります。
その後「電源を切ってから」SDカードを抜いてパソコンに挿し替え、プロッターでBINファイルを開きます。
プロッター画面には最初、データ不良の画面が出ますが、
OKを押すと選択画面「Schedule and Site Selection」に変わります。
ここで次の様に、
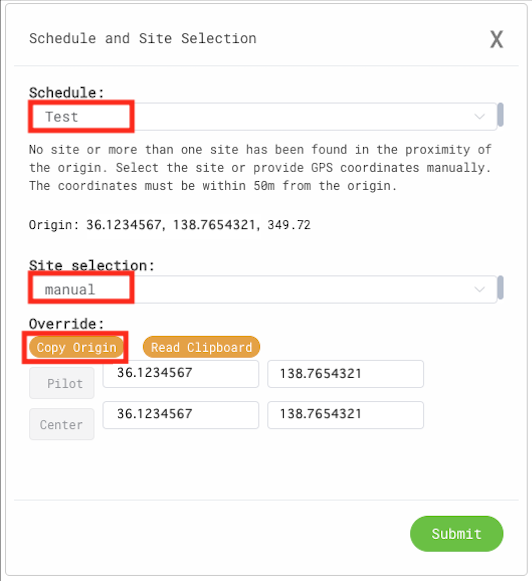
Schdule欄は、Ground Test >「Test」
Site selection欄は、「manual」と、設定します。
その後、Copy Originボタンを押すと、パイロットとセンターの座標が自動的に入り、
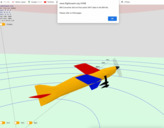
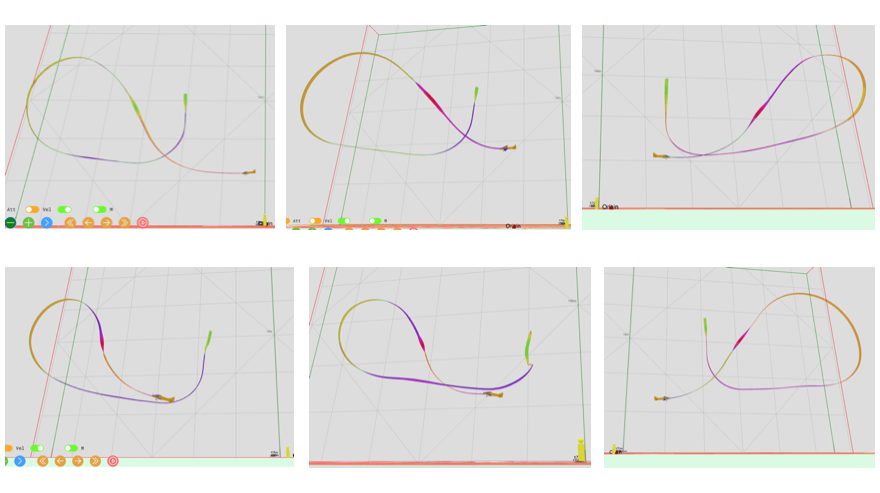
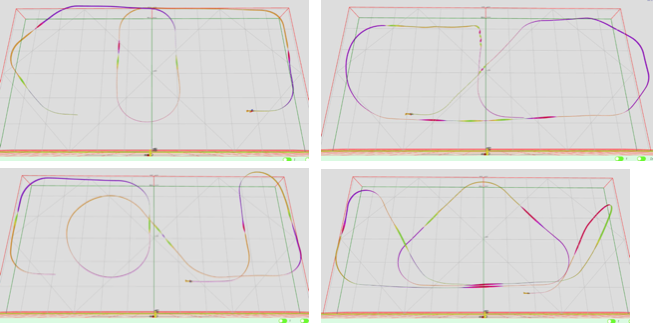
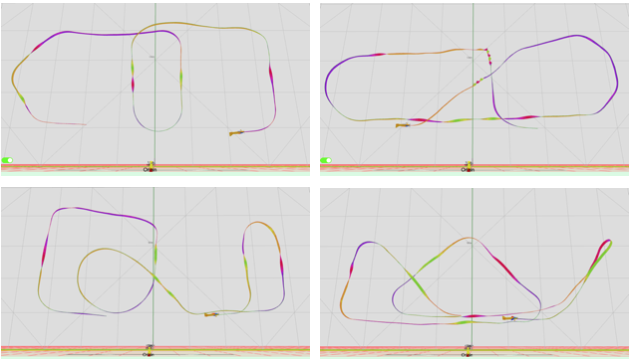
最後にSubmitボタンを押すと、次の様な経路図が表示されることになります。
もしBINファイルが一番怪しいなら、コピーして私のところへメール添付して送ってもらえませんか?
こちらの連絡先は、お問い合わせに一旦連絡していただければ、折り返します。
縦8も上手く纏まっています。
フライトコーチを使用しての練習の成果が確実に出ていますね。
同上です。
誠に申し訳ありません。プラウザのキャッシュを全期間削除しましたが、file not loaded です。
Sさん。
私は電気の専門的な知識は無いので、詳しい事は他の方に任せるとして、経験上の話をします。
まず、ファイルの記録時間ですが、これは私のも違っています。
なので、これは問題無いでしょう。
それで、やってみる事としては、ブラウザのキャッシュをカラにしてから、再度プロッターを読み込んでみてください。
変化が無ければ、また連絡お願いします。
SDカード内に間違いなくBINファイルはありますが、開くことができません。
スケジュールと場所を選択するように求められません。
ちなみにファイルの記録時間も正しくありません。
何かのエラーですか?
解決方法ありますか?
「いつ飛行開始したらいいの?」以外の便利な使い方を紹介します。
⓵ ブザー
MinipixやOMNIBUS F4 PROなどはブザーに対応しています。
FCがアームすると2秒程度「ブー」とブザーが鳴ります。日中はLEDが見ずらいので自分はブザーに頼っています。
ARMING_REQUIRE=0だと電源投入後すぐにブザーが鳴りますがARMING_REQUIRE=1にしてARMING_CHECKを有効すればブザーだけで「いつ飛行開始したらいいの?」がわかります。
⓶ OLED
他の方も紹介されていますがFCのI2CバスにOLED付けることができます。
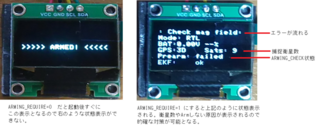
フィールドでFCの状態を知るには非常に便利なものですが、ARMING_REQUIRE=0にすると電源投入後すぐに自動アームとなるため添付左の写真の表示となり肝心の状態が表示されません。ARMING_REQUIRE=1 にするとアームの条件が整っていないときには写真右のような表示となりアームしない原因がわかります。
I2Cバスなので取り外し式にしておきアームしないときの原因究明の時だけ取り付けることもできます。
⓷ ログ吸い上げ
SDカードのログは 「00000001.BIN」 といったファイル名ですが、FCとパソコンをUSBで接続し、MissionPlannerを使ってログを吸い上げると「1 2023-03-11 14-32-01.bin」のように飛行時の日時付きのファイル名になります。
ただし、アーム中はログ吸い上げができないのでMissionPlannerからディスアーム指令を送るのですが、ここでもARMING_REQUIRE=0だとすぐに自動アームされるのでログ吸い上げができません。
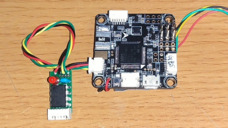
⓸ 手動アーム・ディスアームスイッチ
MT-MAV01は、外部スイッチを追加して手動アーム・ディスアームできるPinをコネクタに用意しています。
コールドスタートでは衛星補足に結構時間がかかるので、事前に電源を入れておきます。1度ディスアームスイッチを押すとディスアーム指令を出すと共に10秒おきの自動アーム指令を終了します。飛行前に手動アームスイッチを押せばアーム指令を出しARMING_CHECKをPassすればログを開始します。
自分はここでブザー音を確認して飛行させています。
上記のように、ARMING_REQUIRE=0ではArudupilotが持つ優れた機能のいくつかが利用できないのでMT-MAV01を作りました。
今回MAVLINKを使用したのはこれが双方向通信であるためです。FCのアーム状態を確認しアーム後はアーム指令を出しません。このため手動アーム・ディスアームスイッチを付けなくてもMissionPlannerからディスアームすることができます。
CPLR選手のP23パターン。
ビデオでは正確な所は分かりませんが、45°が良くなっている感じがしました。
水平進入も頭下げの感じはありませんね。
グーグル・マイマップのRC飛行場の説明欄に、フライトコーチに登録済みの飛行場を加えました。
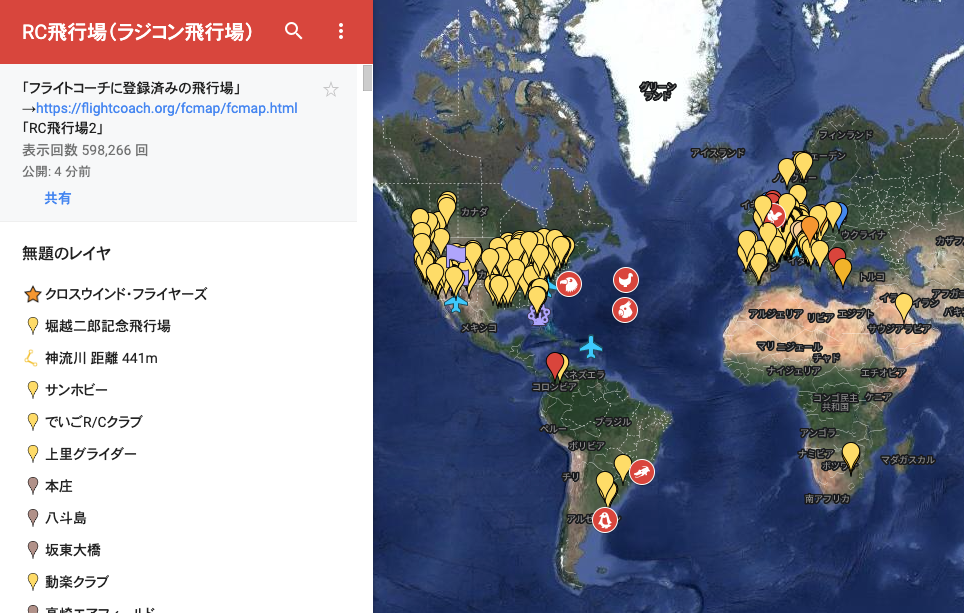
機種によってはフライトコーチの地図が見られない場合もありますが、私のSafariではキャッシュをカラにすると地図が見られる様になります。
go3さん、書き込みありがとうございます。
PayPayフリマで検索してみました。
https://paypayfleamarket.yahoo.co.jp/user/p6831727
フライトコーチ利用者の数がどんどん増えるといいですね。
色々な情報発信をお願いします。
東北地区では、5月28日にパターンの講習会と飛行会が行われます。
「2023年東北F3A講習会兼スタント競技大会」要項
お試しさせてください
これまで飛行開始のタイミングを図るために、①の方法でARMINGをFCに確認させて いい結果を得ています。
ただし、飛行機の受信機に接続しているわけではなくて電子工作試作品でシミュレート動作しています。
同時に、FCで小型EL表示をさせて エラー原因を確認しています。
私の環境では、2種類のエラーが発生していました。
ひとつは、車の影のGPS捕捉数不足。 もう一つは、磁気エラー。
磁気エラーの原因は、待機場所にあるワイヤー入りのゴムシートでした。
これが判ったので、それ以降は快適にLOGが取得できています。
FlashAir(WiFi)経由でLOGを抜き取りたいので、オプションのARMING 停止のボタンは追加して使いたいと思ってます。
はじめまして、フライトコーチとArdupilotにハマっているgo3と申します。
「いつ飛行させたらいいの?」を解決する装置を作ったので紹介します。
FC側のソフトであるArdupilotにはGPSやコンパスなどの準備が整ったかをチェックする機能(ARMING_CHECK)が用意されていますが、
フライトコーチでは電源投入後の操作をしなくてもログが開始できるようにアーム操作不要(ARMING_REQUIRE=0)に設定されています。
この設定の場合はARMING_CHECKが働かず電源投入後数秒で強制アームとなりログ収集を開始し、その後GPSが衛星4個程度を受信すると3D-FIXとなりOrigin位置が記憶されます。
しかしこの段階では位置精度が十分ではなく記録されたOrigin位置が実際とずれていることが有ります。
フライトプロッタ―で表示させようとしたときに、"more than **m from the origin"となったり表示されたリボン図にセンターズレや高度ズレが生じるのはこのためだと思われます。
GPS、IMUなどの準備が整いEKFが動作開始(EKF3 active)した後にログを開始すればこの問題は解決するはずです。
ARMING_REQUIRE=1にしてARMING_CHECKを有効にすればよいのですが、以下のいずれかの方法でアーム指令を出す必要があります。
⓵ 飛行機本体の受信機とFCをSBUSで接続し、15秒程度右ラダーを打つ。
(欠点:F3AなどFCとは完全に分離しておきたいが・・・)
⓶ LUAスクリプトを使う。
(欠点:Pixhawkなど2MB以上のFCに限定される)
⓷ MAVLINKを使う。
今回作った装置は⓷のMAVLINKを使ったものです。
電源投入後10秒おきにアーム指令を出し、FCがARMING_CHECKをPassしてアーム完了となれば飛行可能の状態となりLEDやブザーで知らせます。
興味のある方はPayPayフリマで入手できます。 "MT-MAV01" で検索してください。
昨日の今日なので異常が心配でしたが、毎フライト、問題なく再生できました。
フライトコーチを使い始めてもうすぐ2年。
加齢による衰えもあるので、気づいた事も中々実行できませんが、使い続ける事でそれなりの効果が出て来た様に感じています。
この自由フライト自体に全く問題は無く、こんな事に利用して動画制作者さんには申し訳ないのですが、1:40と1:55の高度差に注目してみてください。
動画の中の0:35〜のロールで、特に高度に注目してみてください。
前出の画像にある様な進入飛行と同じ感じがしませんか。
このフライト自体は演技ではないので、何でも構わないのですが、もしパターンの演技であったなら高度変化も審査対象になります。
単純な演技で滑らかさだけに気を取られ、それが癖になってしまわない様に気をつける必要があります。
これは、フライヤーと観客、両方に言える事です。
話が逸れますが、こちらは別の、ヨーロッパ、トップクラスの選手のフライトです。
普段からこれくらい正確に飛んでいるんですね。
このクラスになるとアンノウン演技で勝敗が決まってしまうとも言えるので、フライトコーチを使ってどうのこうのというレベルの戦いではなくなってしまうのかもしれません。
逆を言うと、これくらい飛ばせない場合は、フライトコーチで基本をしっかり身につける事が必要という事です。
テンプレートを使う時、1つ1つの演技で区切って細かく調べるのも大切ですが、複数の演技をつなげて比べる事も大事です。
特に、演技の大きさについては、何故その大きさになるのかといった、新しい発見があるかもしれません。
テンプレートだけが唯一の正解ではありませんが、色々なヒントが含まれているので、こういった機能を利用してみるのも良いものです。
一方、テンプレートではありませんが、画像で使ったフライトはこちらにアップしてあるので、ダウンロードして保存すればOpen JSON2で使うことができます。
自分と違うリズム感の演技と比べてみるのも面白い事です。
今日は全国的に強風の様ですね。
フライトに行けないので、ちょっとターンの様子を纏めてみました。
P23の直前ですが、どんな感じの進入をしているかが良く分かります。
基本ルールに「15°につき1点減点」というのがあって、今は0.5点も使うので、ピッチのズレによる減点は、
7.5°までが0.5点の減点、7.5°〜15°までが1点の減点という事になります。
時計の長針の5分が30°です。(2点の減点)
1分なら6°(0.5点の減点)
2分なら12°(1点の減点)
今月の26日には九州でF3A研究会が開かれたり、その後も各地区で同様の事が行わます。
九州では昨年、フライトコーチが使われていましたが、今回もその予定があるそうなので、水平飛行の確認などに利用されるのか、ちょっと期待しているところです。
中部地区
関西地区
前向きなお考え、ありがとうございます。
要はやってみる事です。
気軽にお願いします。
発表会ですか。
確かにそれが、励みと刺激になりますね。
少し、恥ずかしい気持ちもありますが、定期的にアップロード。
先輩方のご助言をいただくことが可能でしたら、一人で悩むより、早く進歩できるのかもしれません。
まずは、一月後、基本の水平飛行・背面水平飛行・垂直の上昇と降下などをアップロードします。
その節は、宜しくおねがいします。
リボン図が見られた様で良かったです。
長年染みついた癖は中々抜けないものですが、練習を続けてみましょう。
それと、練習に於いて大切な事は発表する事です。
習い事では、必ずと言って良いくらい発表会があります。
この掲示板をそういう目的に利用して頂ければと思っています。
2本目のリボン表示出来ました。
ありがとうございます。
現状ですが、改めて自分の飛行軌跡を見るにあたり、
水平飛行・背面飛行・垂直上昇・垂直下降の未熟さを思い知っています。
基本に戻り、この部分の集中練習を取り入れて、前回の飛行と今回の飛行を見比べて修正するようにし始めました。
ただ、実際の飛行では、なかなか困難ですよね。
頑張ります。
2023年F3A世界選手権のサイトではジャッジも紹介されています。
日本のジャッジも入っていますね。
伺ったところ、フライトコーチの経験もおありだそうです。
ありがとうございます。
返信遅れてすみません。
やってみます。
「Open JSON2」ボタンを押して、自分で作って(又はネットで手に入れるなどして)保存しておいたJSONファイルを開くだけとなります。
JSONファイルは事前に用意しておかなければなりません。
その作り方は、通常通りプロッタでリボン図を閲覧している時に「Save JSON」ボタンを押してください。
すると、JSONファイルが自動的に作成され、PCなどのダウンロードフォルダーに保存される事になります。
JSONファイルの作り方はこちらの動画のラスト部分にあります。
こんにちは
基本的な質問ですいません。
2本目のリボンを同時に表示させる具体的な手順が、良く判りません。
申し訳ありませんが、ご教示頂けますでしょうか?
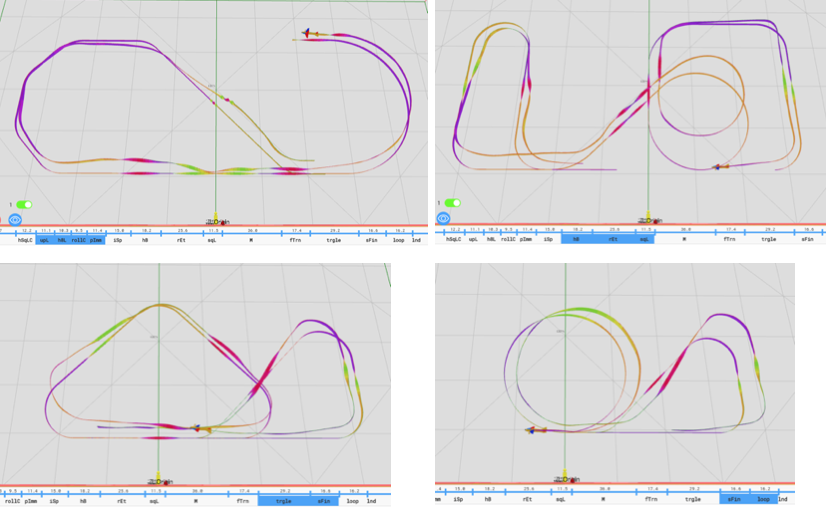
TDさんのP23があったので、自分のと比べてみました。
並べて見ると、どんなリズムで演技をこなしているのかが分かります。
2023年F3A世界選手権はオーストラリアのWarwick(ウォリック/ワーウィック)で8月19~26日に開催されます。
2023 FAI F3A WORLD CHAMPIONSHIP
会場となる実機飛行場がFCMapにも載っていました。

競技で飛行分析機能を使うのは禁止されていますが、それ以外の場面ではどうなのでしょうか。
飛行場を登録しておけばBINファイルを開く時に自動的に飛行場が表示され便利ですが、登録していない場所に行った場合は自分でパイロット位置などの緯度経度(10進表記)を入力しなければなりません。
もしそれが面倒で、とりあえずデータの成否を確認したいというのであれば、次の様な方法があります。
(コメント14と重複する所があります)
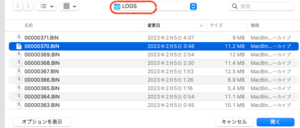
マイクロSDカードのLOGSの中から、見たいフライトのBINファイルを選びます。
Schduleは「P23」を指定して、飛行場所は「manual」を選びます。

「manual」になると「Copy Origin」ボタンが現れるので、それを押すと表示中の緯度経度が全て同じになります。

Submitを押すとリボン図が表示されます。
方角が指定されていないので演技面が合っていませんが、一応フライトの確認はできます。
3D画面は、マウスやキーの組み合わせ操作で視点を変えられるので、機種毎の動かし方を調べておく必要があります。
尚、パイロットやセンター位置の緯度経度を調べるのは、FCMapを使うと便利です。
また、飛行場登録はこのSite Formを使って申請します。
(つづき)
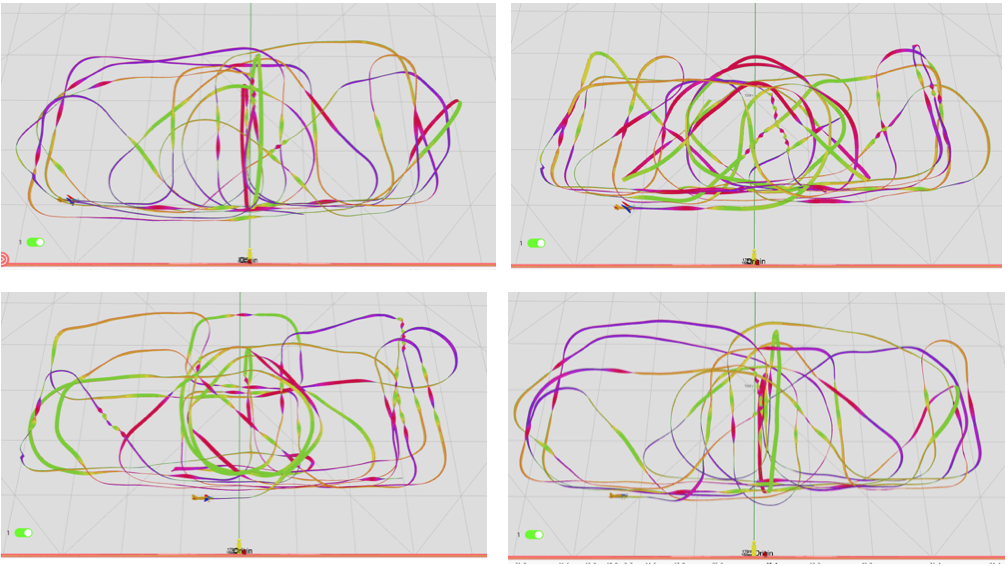
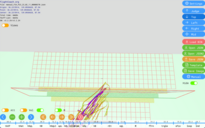
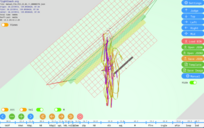
下図は、Primary GPS(青)、Secondary GPS(緑)、ブレンドされたGPS(黄)そして最終的なPOS(赤)から出力された飛行軌跡を比較して示しています。このように、機体内のほとんど同じ位置に設置してあるGPSでも機体の姿勢によって測定位置にズレが生じています。
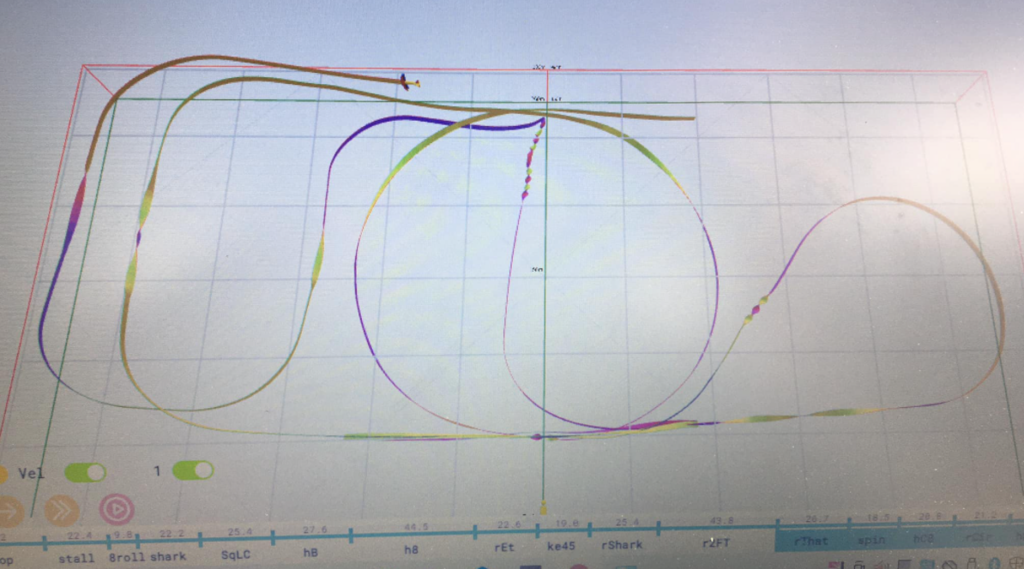
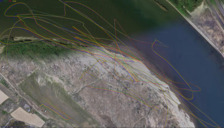
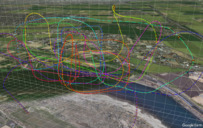
下図は、POSからのフライトデータをGoogle Earth上に表示したもので、各マークや表示文字の意味するところは以前説明したとおりです。フライトパス上の白い四角マークはPrimary GPSの衛星捕捉数が12未満となる位置を表していますが、前述の通り今回のフライトでは衛星捕捉数は9個以上となります。白い四角マークとフライトパスが少しずれているところもありますが、これは四角マークはPrimary GPSの位置であり、フライトパスはPOSの位置であるためです。衛星捕捉数が少なくなるときの機体姿勢は、ほとんどが背面あるいは垂直上昇の姿勢で、これはGPSアンテナを1個搭載した場合と同じ傾向です。
以上の解析結果から、GPSアンテナを2つ上向きで並べて配置し"GPS Blending"機能を使用した場合、衛星捕捉数が9個以上、HDopが2.0(m)以下であれば、両GPSのデータが両者の測定精度にしたがって滑らかにブレンドされ、最終的に出力される飛行軌跡もジャンプすることなく滑らかに両GPSの測定位置間を移動することが分かりました。
今回も前回と同様に、GPSアンテナを2つ上向きで並べて配置し、"GPS Blending"機能を使用してGPSエラー発生の有無を調べました。フライト回数を重ねるにつれて、システムの学習機能が効いているせいなのか、小さなジャンプも含めGPSによるエラーが少なくなっているように感じます。今回のフライトでは衛星捕捉数の最小値は9個、HDopの最大値は1.92(m)で、小さなジャンプやスライドも含めGPSによるエラーと思われるものは見当たりませんでした。
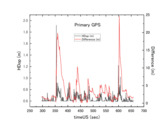

下図は、Primary GPSのHDopと、Primary及びSecondary GPSの間の測定位置のズレDifference(m)の関係を示しています。HDopが大きくなる(測定精度が悪くなる)とズレも大きくなることが分かります。今回のフライトではズレの最大値は約25(m)でした。
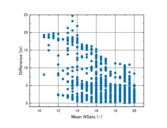
下図は、Primary及びSecondary GPSの衛星捕捉数の平均値と、両者間の測定位置のズレの関係を示しています。衛星捕捉数が減少すると両GPS間のズレは大きくなります。このように、ジャンプやスライドといった明らかに分かるGPSエラーが無い場合でも、衛星捕捉数が減少しHDopの値が大きくなった場合にはGPSの測定位置に誤差が生じている可能性があることを認識しておく必要があります。
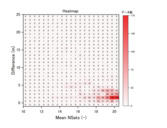
下図は、両GPSの衛星捕捉数の平均値とそれらの間の測定位置のズレに対するデータ数のHeatmap図です。図中の数値はデータ数を表しており、データ総数は1769個です。今回のフライトではほとんどのデータは右下、つまりNSatsで14個以上、ズレで7(m)以下の領域に集まっています。
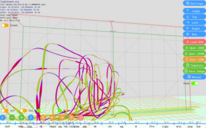
下図は、両GPS、ブレンドされたGPSそしてカルマンフィルターを通して最終的に出力されるPOS(Plotterで使用されるデータ)からの緯度、経度およびHDopの値を経過時間timeUS(sec)で表しています。POSデータ(オレンジ)は、Primary GPSのHDop(赤)が大きくなるとPrimary GPSからの出力データ(赤)から離れSecondary GPSからの出力データ(緑)に近づき、Secondary GPSのHDop(緑)が大きくなると今度はSecondary GPSからPrimary GPSのデータに近づくことが分かります。このように、両GPSの出力データ間をジャンプすることなく滑らかに移動しています。
トピックP-23.07 Roll Combinationで、動画を使いました。
それと、YouTube動画をこのコメント欄に貼り付けるのは、記入枠の下にあるマーク一覧の中から「フィルムマーク」をクリックして、動画のURLを記入すると完了します。
別のミュゼットの動画です。
水平ロールでは多くの場合、開始時の水平が頭下げで、そのまま降下ロールとなっています。
高性能パターン機でもそうですから、小型で反応の速い機体を水平に飛ばすのは更に難しいですが、その分、練習になるかもしれません。
230205本日の切り替えしロールです
(https://youtu.be/at8TWi9FzT8)
舵を戻す事が重要ポイントです。
動画の9:03や9:06を見てください。
エレベーターを引いたまま、エルロンを打つのではありません。
5度ヘッドアップさせた瞬間にはエレベーターはニュートラルです。
10度というのは初級トレーニング用です。
そして、この5度というのはフライトコーチの姿勢グラフでは確認できるのですが、肉眼では恐らく見えない量です。
また、「ヘッドアップなど要らないよ」と言われる場合の飛行は、単に降下ロールを行なっているだけに過ぎないのです。
昨年9月以降に作って保存しておいたjsonファイルが、v3.2.2Hのプロッターで開けなくなってしまいましたが、
その開示方法を教えていただきました。
https://zawazawa.jp/flightcoach/topic/5/3