フルサイズをもう1機紹介しておきます。4例目です。
自然の摂理に反して、スピードグラフが右肩下がりになっています。
最低速、最高速、という呼び方にも合わなくなってしまいましたが、他と合わせた場所に表示しました。
機体 :例1----例2---例3---例4---(BP)
入口 :115----97---129---139---(65) km/h
最低速:108----96---119--<140>--(61) km/h
最高速:156---144---122--<120>--(98) km/h
出口 :150---130---108----88---(84) km/h
増加分:35-----33, 21, 51---(19) km/h
割合 :1.30--1.34--0.84---0.63--(1.3)
時間 :6.2----6.7----8.2---7.5---(6.0) sec
フルサイズ機3例目です。
スピードグラフが平らになっていて、出口では逆に入口よりも遅くなっています。
機体 :例1----例2---例3---(BP)
入口 :115----97---129---(65) km/h
最低速:108----96---119---(61) km/h
最高速:156---144---122---(98) km/h
出口 :150---130---108---(84) km/h
増加分:35-----33-- 21---(19) km/h
割合 :1.30--1.34--0.84---(1.3)
時間 :6.2----6.7----8.2----(6.0) sec
入口 :115---97---(65) km/h
最低速:108---96---(61) km/h
最高速:156---144---(98) km/h
出口 :150---130---(84) km/h
増加分:35----33----(19) km/h
割合 :1.30--1.34--(1.3)
時間 :6.2---6.7---(6.0) sec

感じも大事ですが、数字が出ていれば十分参考になります。
それで、
ループ中のスロットル操作は、両方とも全く無しですか。
参考になるか?ですが、小型機にガバナーESCを積み正宙返りを行った結果を
自分のブログに掲載しました。
https://rcairplane.exblog.jp/241566336/
下降時のブレーキ効果は大型機が有利と漠然と考えていましたが、重量の軽い
小型機の方が効果が出やすいのかもしれないと思いました。
落下スピードは、パワー次第で決まる垂直上昇性能と違って、基本的な機体の特性を知る良い目安になります。
色々な機体の状況も知りたいので、是非、情報を書き込んでみてください。
画像なしで結構です。
「どんな状態のとき何km/hだったか」、せっかく取ったフライトコーチのデータですから、見直すだけでもしてみましょう。
前の方が最後の演技に入ったら、起動して待機するように運用して様子をみてみることにしました
とりあえず
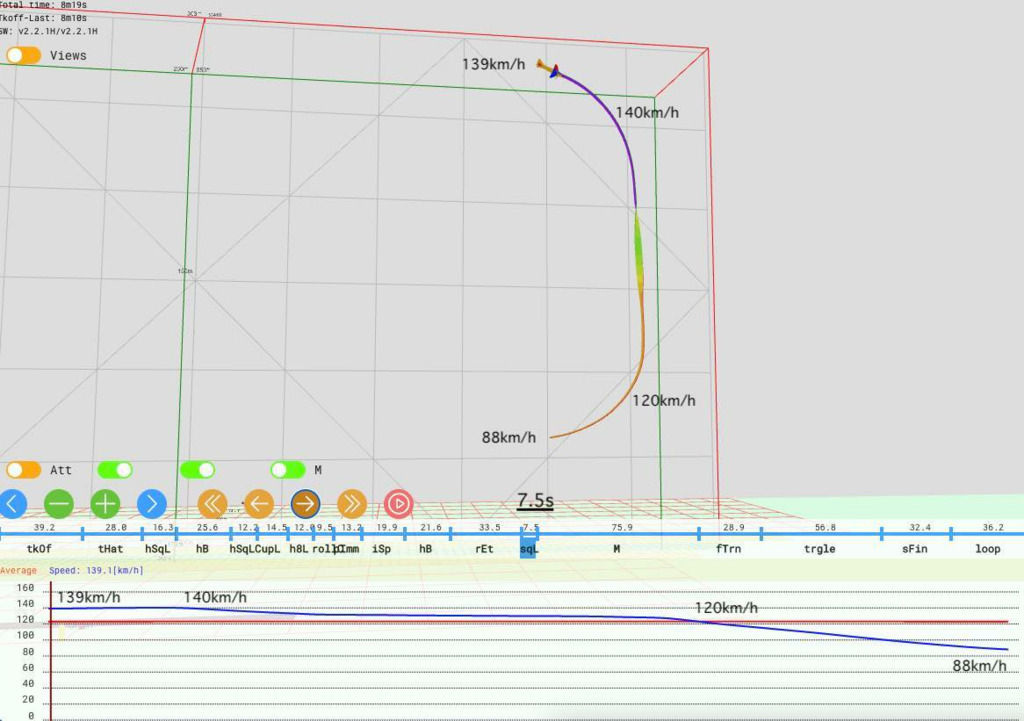
フルサイズをもう1機紹介しておきます。4例目です。
 21,
21,  51---(19) km/h
51---(19) km/h
自然の摂理に反して、スピードグラフが右肩下がりになっています。
最低速、最高速、という呼び方にも合わなくなってしまいましたが、他と合わせた場所に表示しました。
機体 :例1----例2---例3---例4---(BP)
入口 :115----97---129---139---(65) km/h
最低速:108----96---119--<140>--(61) km/h
最高速:156---144---122--<120>--(98) km/h
出口 :150---130---108----88---(84) km/h
増加分:35-----33,
割合 :1.30--1.34--0.84---0.63--(1.3)
時間 :6.2----6.7----8.2---7.5---(6.0) sec
例3はリボンのカット位置が悪かったので、実際は7秒台ですね。
これらはフライトデータだけなので、機材については不明です。
こういったスピードで飛んでいる、といった程度に見てください。
もし実例があれば、公開していただけると有難いです。
モーターとESCの仕様も書き加えて頂けると良いと思います。
最後の例はコントラ+ガバナーESCでしょうか?
ベルトダウン+ESCのブレーキ設定?
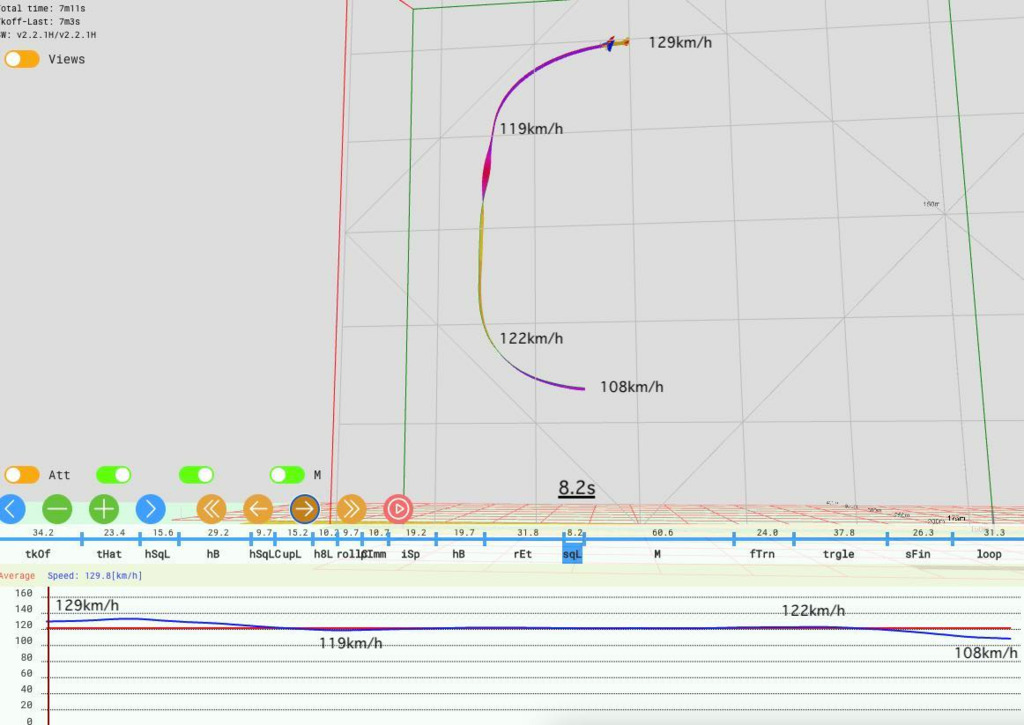
フルサイズ機3例目です。
 21---(19) km/h
21---(19) km/h
スピードグラフが平らになっていて、出口では逆に入口よりも遅くなっています。
機体 :例1----例2---例3---(BP)
入口 :115----97---129---(65) km/h
最低速:108----96---119---(61) km/h
最高速:156---144---122---(98) km/h
出口 :150---130---108---(84) km/h
増加分:35-----33--
割合 :1.30--1.34--0.84---(1.3)
時間 :6.2----6.7----8.2----(6.0) sec
こちらはフルサイズ機の2例です。
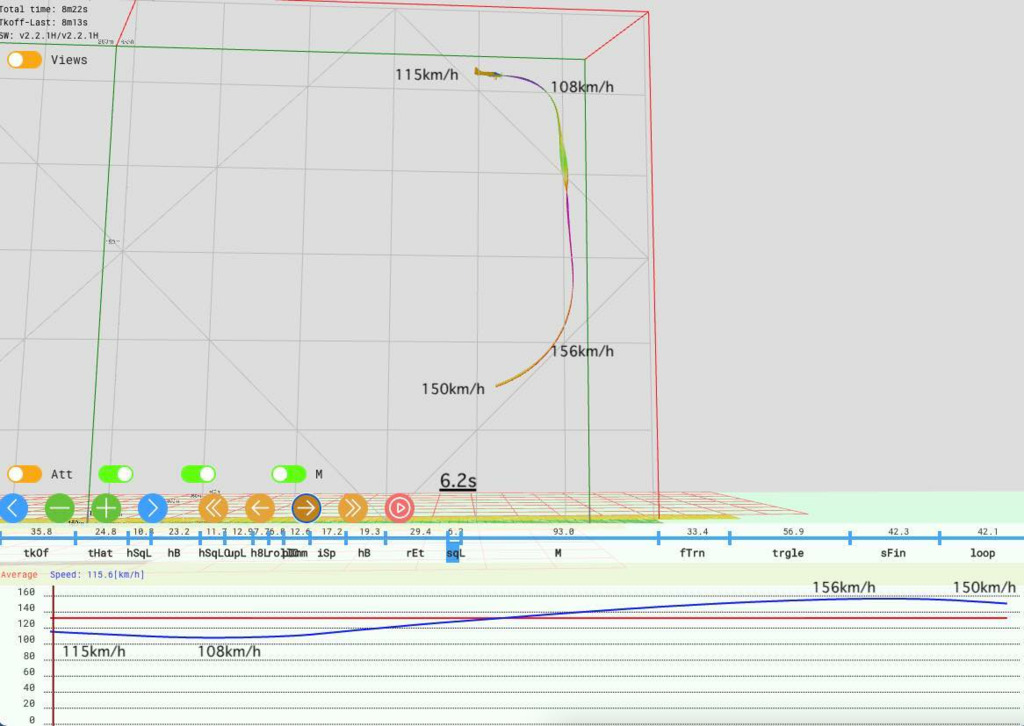
分かりやすい様に、両方のスピードや所要時間などを書き出しておきましょう。
割合=出口/入口で、3番目はミュゼットBPの補正値です。
入口 :115---97---(65) km/h
最低速:108---96---(61) km/h
最高速:156---144---(98) km/h
出口 :150---130---(84) km/h
増加分:35----33----(19) km/h
割合 :1.30--1.34--(1.3)
時間 :6.2---6.7---(6.0) sec
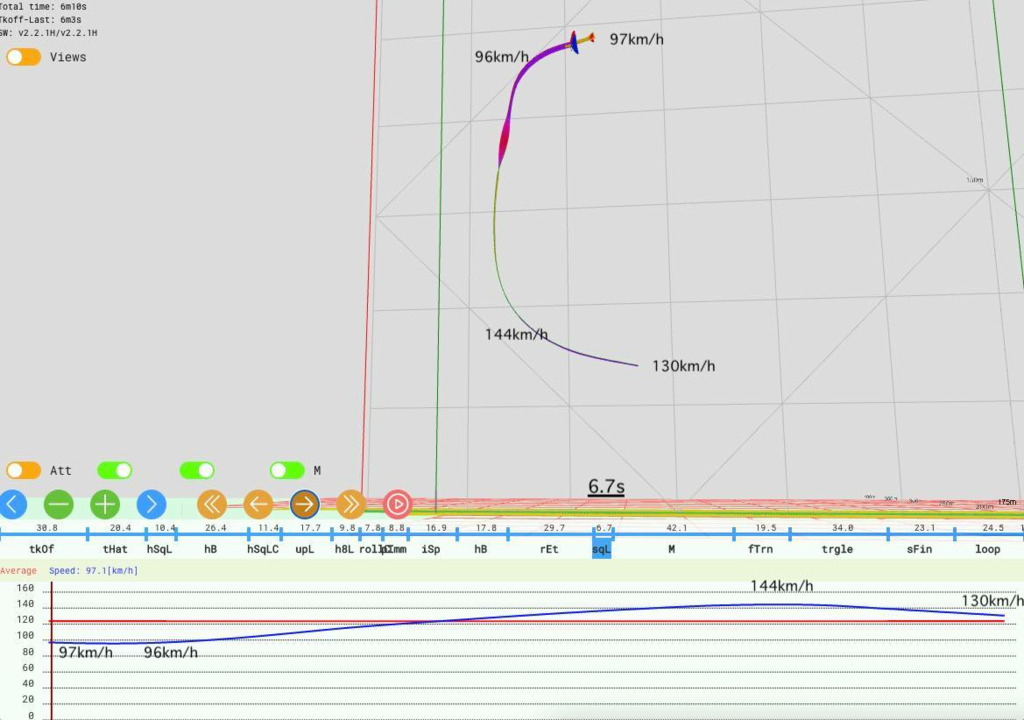
いくつか調べていると、中にはこんなフライトもありました。
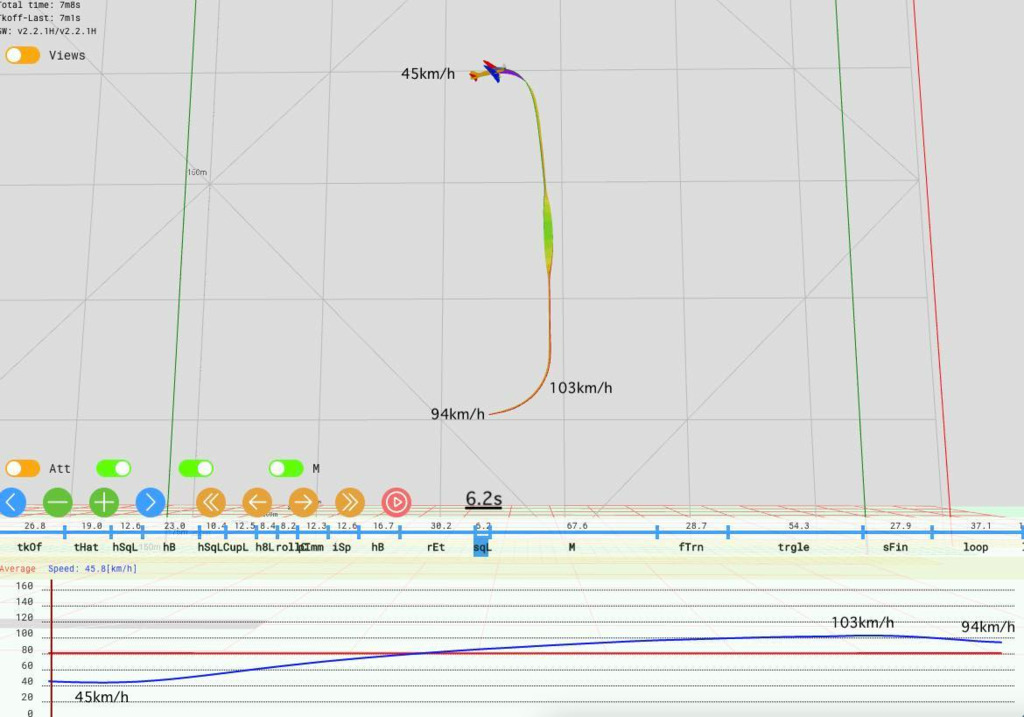
開始が45km/hと、かなり遅いです。
風でもあったのでしょうか。
上が遅い割に、下では速くなっています。
演技では風や操縦の影響が大きくなるので、データを比較する場合は注意が必要になります。
リボンの切り取りはRの接点から接点までを狙っているのですが、今回のは上手く合っていました。
所要時間は6.2秒です。
実際のP23.12演技で、降下スピードを調べてみます。
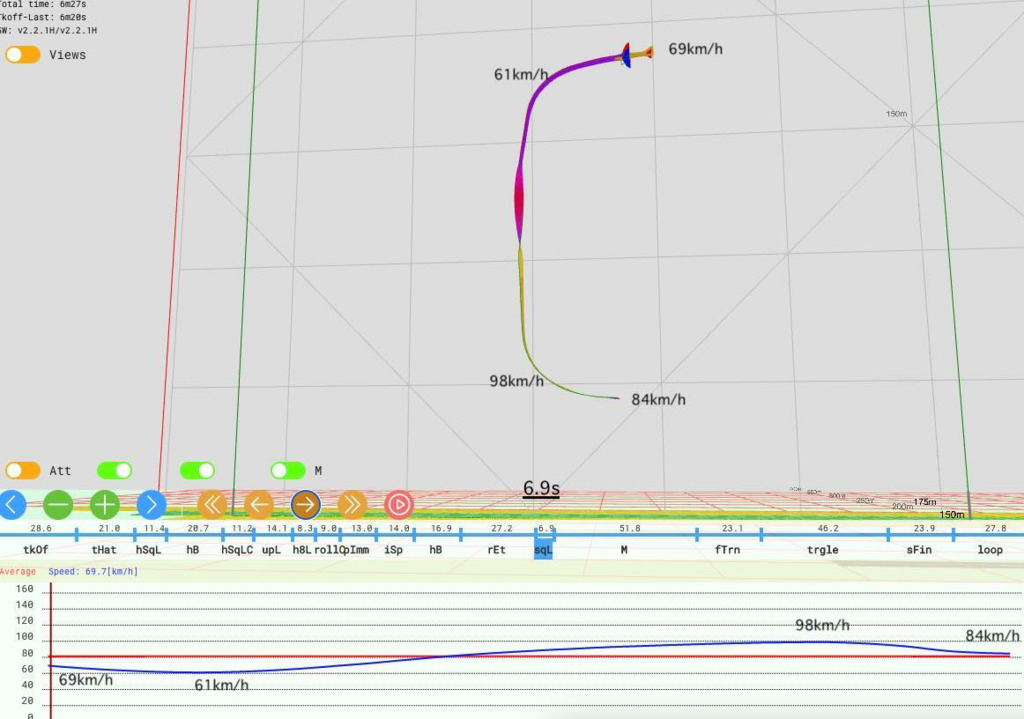
機体は今飛ばしているミュゼットBPです。
細かく見てみると‥
減速しながら69km/hでコーナーに進入し、Rの途中まで減速が続きます。
最低スピード61km/hになると、次は自然落下による加速です。
下のRの途中まで加速が続きますが、98km/hに到達する頃にはヘッドアップによる抵抗増加が勝ってきます。
そこからは減速し84km/hで終了、となっています。
所要時間は6.9秒となっていますが、リボン図をカットする位置がRの接点と合わなかったので、正確には6秒以下となるでしょう。
全く同感です。
MSG,のEKF3 IMU0 origin setを検知して外部への信号化ができればと考えます。
移動可能な信号となるはずです。
Origin位置がオール0でプロッタ表示NGでのLogを見ると、上記のメッセージが存在しません。
F.Cのプログラム変更をできる方がいたら可能性は高いです。
もしくは、他の方法があれば、、例えば、F.C電源投入後に最低2分のタイマーを用意するか、、等です。
貴重な情報をありがとうございます
とても参考になります
移動可能時間を知る有効で簡単な方法を見出したいです。どのくらいで妥協できるのかも。
追記
画像内記載の数字、 0,60,120秒はGPS捕捉後の時間経過を示します。
ご意見のとおりだと思います。
GPS捕捉のLED点灯後に少なくてもある程度の時間が必要と思います。
フライトコーチ電源投入後のミッションプランナでのLog(画像)を添付します。
また、Logをメモ帳のメッセージのMSGで検索すると、
MSG, 112139739, EKF3 IMU0 origin set
が出ます。
MSG,の後の数字で示す、112秒後(下6桁は秒以下のため無視)にOrigin位置を確定していると思われます。
但し、これは一例のデータです。
早ければ、数十秒~60秒以内で上記のメッセージが出る場合もあります。
一概には言えませんが、GPSが安定した状態においては、ある程度の時間経過後に飛行機を移動するのがベストと思います。
貴重な情報、ありがとうございます。
これまで、それほど待たずに飛行開始する事が多かったので、今後その辺の事も意識して結果を見る様にしてみます。
時の流れを感じますね。
F3Aは今ではほぼ電動です。
ヨーロッパの最終結果が出ました。
Final Classiffication (NEW)
日本の結果はこちら。
2022年度 F3A日本選手権 決勝
何人ものジャッジがそれぞれの目で見ているんですが、それが毎回僅差で同じ様な結果となるのが不思議なところでもあります。
特に、自分が関わったりすると、その絶妙な差に驚いたりします。
競技会はこの様な形で継続して行くかもしれませんが、そこに参加できない多くの人にとっては、機械の目が役に立つ存在になる事でしょう。
1995年のF3A世界選手権の写真を見て記憶が蘇りました。私は前年のプレ世界戦大会を遠路はるばる一泊三日の強行軍で見に行きました。
笠岡の場所の広大さ、また沢山の関係者と観客に非常に驚きました。選手たちのレンタカーはベンツ高級ワンボックスカー。日本の国力も頂点でしたが、日本国中からこの台数を集めたのかと驚きました。約28年前の懐かしい思い出です。
更新してV2.2.1Hになりました。
私のMacの場合、Chromeだと動いています。
決勝進出者10名とアンノウンパターン2つが発表されてます。
2022 FAI F3A EUROPEAN CHAMPIONSHIP
THOMASさんは14位で決勝には進めませんでした。
それにしてもアンノウンは難しいですね。
難しいパターンを2つ覚えて、それぞれ一発勝負ですから。
ーーーーーーーーーー
日本でも予選結果が発表になってました。
2022年度 F3A日本選手権 予選
ーーーーーーーーーーー
大会が重なっていたので余計に昔の事を思い出しました。
選手で参加した訳ではありませんが、色んな人の思いと力があって大会は開催されているのです。
日本では今後この様な事ができるでしょうか。
1995年F3A世界選手権の写真
iPhone8でのChromeです。V2.2.1Hに自動更新され、それ以降はNGです。
画面がストップしたまま、本当にどうしたんでしょうか。
対策版を待つしかないですね。
どうしたんでしょうね。
また、変化があったら知らせてください。
情報ありがとうございます。
iPhone8でのChromeはOKです。クラブ員のiPadは本日最初はOKでした。しかし、V2.2.0Hに自動更新され画面がストップしてそれ以降はNGです。その後にChromeをインストール、でも、結果はNGでした。全部見られることを期待ですね。
カルマンフィルタを通して導き出しているのですね、きっと。
仕組みの事は分からないので気にした事も無いですが、多分、GPSや気圧センサーも共に誤差があるので、それぞれを補いながら計算しているのではないでしょうか。
素朴な疑問です。速度計測はGPSを使って移動距離と時間から割り出していると
思っていましたが、垂直降下の時などはどのようにして計測されているのでしょう?
高度は気圧センサーですか?
機能追加と言うことではないのですね。
ありがとうございます。
4ラウンド終了して、予選の結果が発表されました。
Final Preliminary (NEW)
次は上位20名で準決勝になります。
ーーーーーーーー
それと、日本では今、2022年度 F3A曲技日本選手権(8月24日~28日)が開催されてます。
結果は日本模型航空連盟のサイトで発表されます。
最初β版として発表したものが、V2.2.0Hとなって正式に公開されました。
一見大きな変化が無い様な感じですが、プロッターの3D画面操作がスムーズになり、歪みも改善されました。
それと、以前はボタン操作で色々と不都合な点があったのですが、その辺りも改善されてます。
β版は機能的に何が変わったのですか?
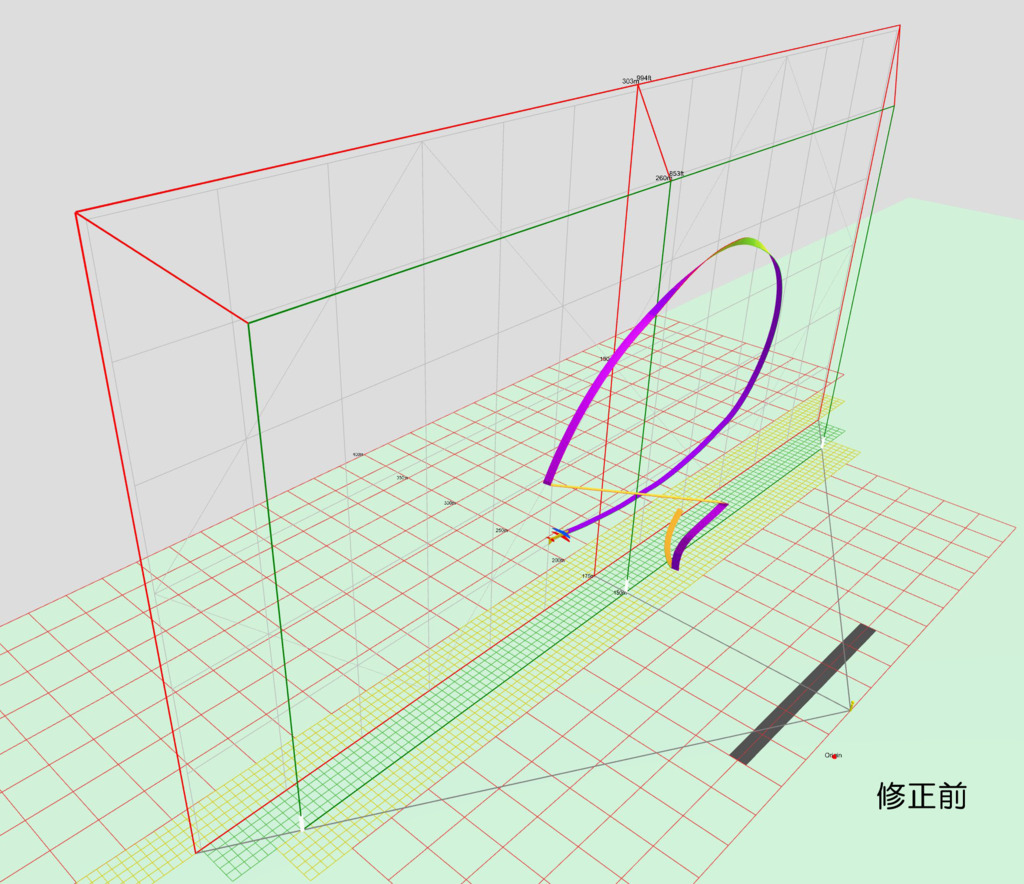
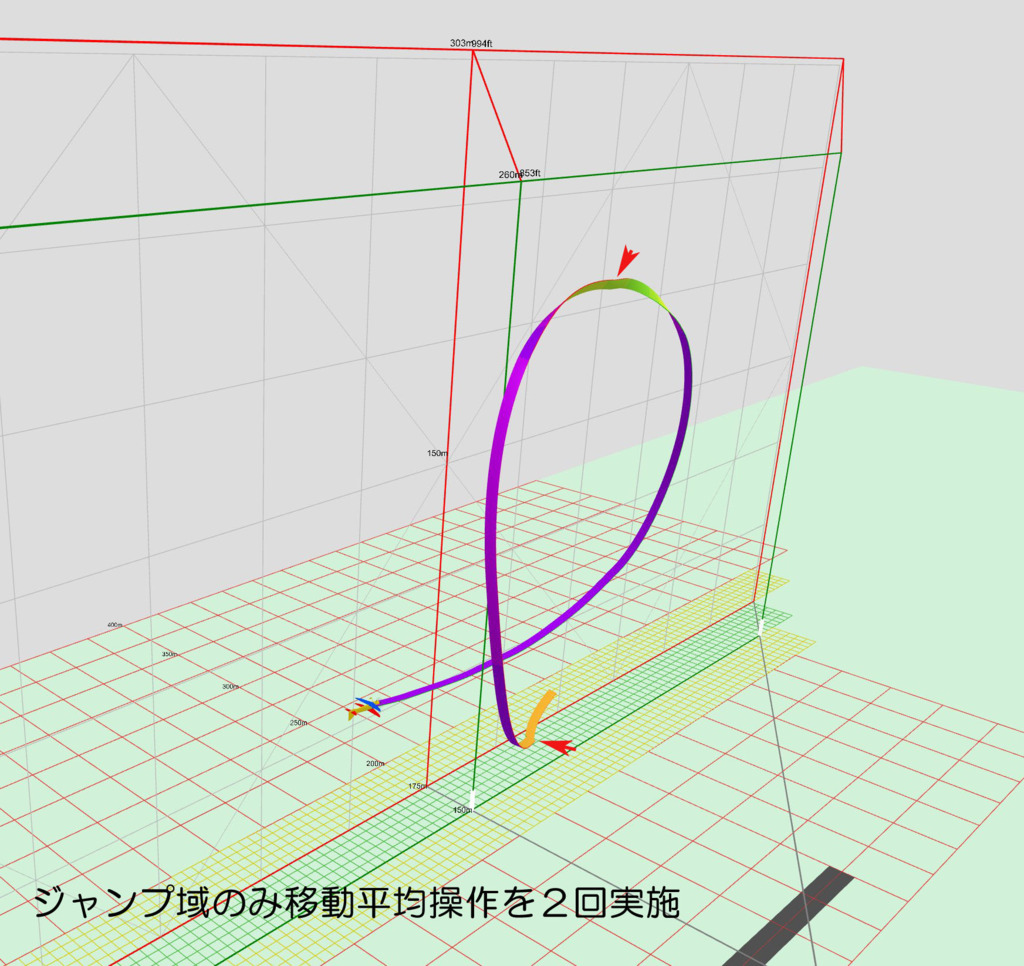
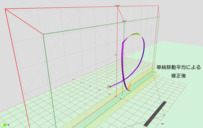
下図に、修正前とジャンプ域のみ単純移動平均操作を2回実施した修正後のリボン図を示します。ループの中程(修正操作の入口,赤矢印)とループの出口(修正操作の出口,赤矢印)に多少不自然さが残りますが、修正前と比較すると、修正精度は抜きにしてある程度見た目上ジャンプの修正ができたのではないかと思います。
TakJP様
再試行ありがとうございました。
soramon様
フライト全域で移動平均した結果を下図に示します。
これは1回移動平均操作をした結果で、前回の投稿でお示しした結果とほぼ同等です。ジャンプの入口でリボン図が折れ曲がっています。また、フライト全体を見ますと、全体的に飛行軌跡が滑らかとなっています。
次にこの図は全域での移動平均操作を2回実施した結果で、今度はリボン図の折れ曲がりは見られず滑らかなループになっています。全体を見ますと、更に飛行軌跡は滑らかとなっており、曲技の角は取れてRのようになっています。例えば、トライアングルの三角形は角が取れてループのようになります。
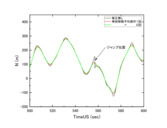
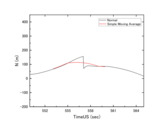
これは、NED座標のNの時間変化を修正のあるなしで比較したもので、修正無しより1回目の修正、更に2回目の修正で角が取れて変化が滑らかになる様子が分かります。
以上の解析から、もしリボン図のジャンプを、JSONファイル上のNED座標値の移動平均で修正する場合は、修正はジャンプの前後に限る方が良いと思います。
以上、ご報告でした。
プロッターが更新されて、V2.2.0Hになりました。
私のMacの場合、Chromeだと動きますが、Safariではキャッシュを空にしても相変わらずダメでした。
飛行場で直ぐにフライトチェックできるのが良いですね。
周りの人も気にしてくれるかもしれません。
スマホやタブレットで再生するの、まるで意識していませんでした。
さっそく8000円で入手したBlackview tab6(カーナビ用に購入)で
試したらバッチリ動きました。アニメーションも味のある速度で動き
バッチリです。飛行場にPCを持ち込むのが面倒と思っていたので
助かります(^^)
TakJP様
変換ありがとうございます。ジャンプ地点の前後のみではなくジャンプ位置を特定せずにフライト全域で移動平均するイメージでした。この場合、正常なリボン図も鈍るので滑らかさの妥協点を探すことになります
(機速や旋回半径と関係ありそうです)。
当方もpythonをかじり始めましたが未だ辞書型って何?といったところで停滞中です。
ご無理を言って恐縮ですが全域移動平均のリボン図を試して頂けると嬉しいです。
また、TakJP様が以前仰っていたようにEKF_パラメータでフィルタの調整ができそうですが、カルマンフィルターの知識が無い上に翻訳機の問題なのかパラメータの意味と効果が良く分かりません。ジャンプの再現性もほぼ無いのでこちらは手がついていません。
トップビューを羅列してみます。
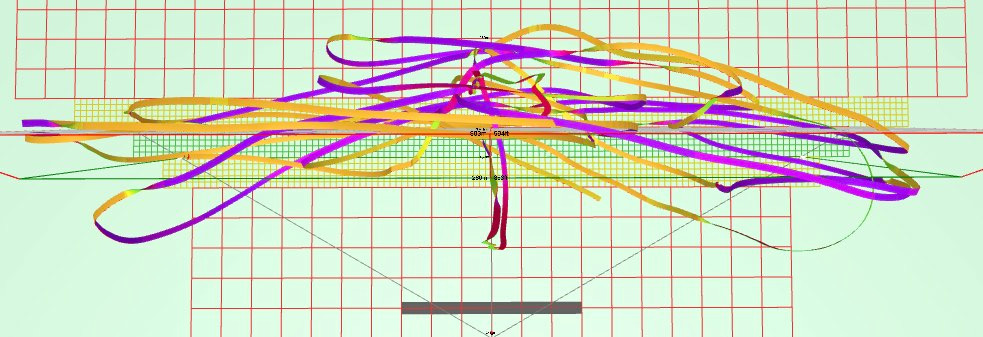

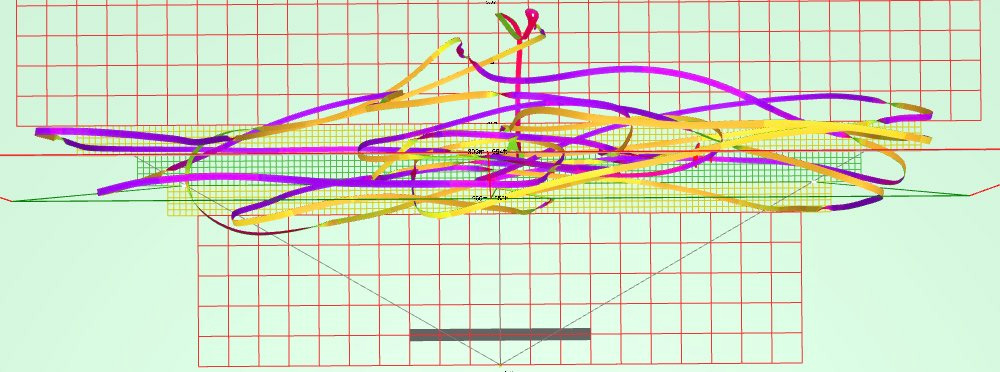
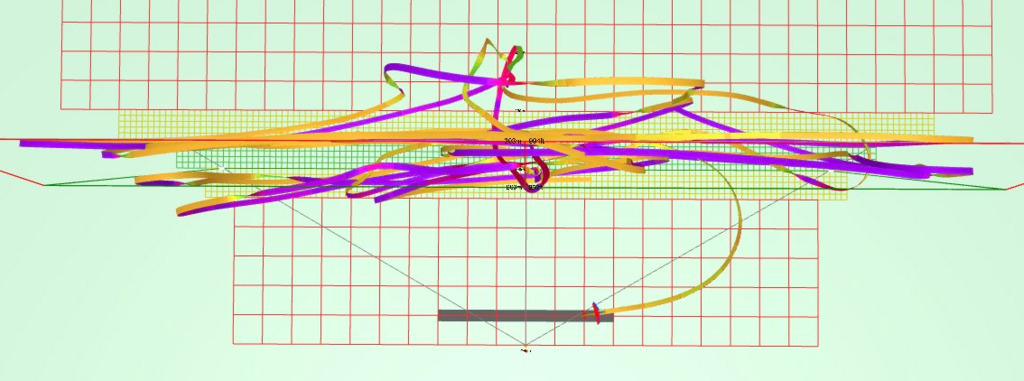
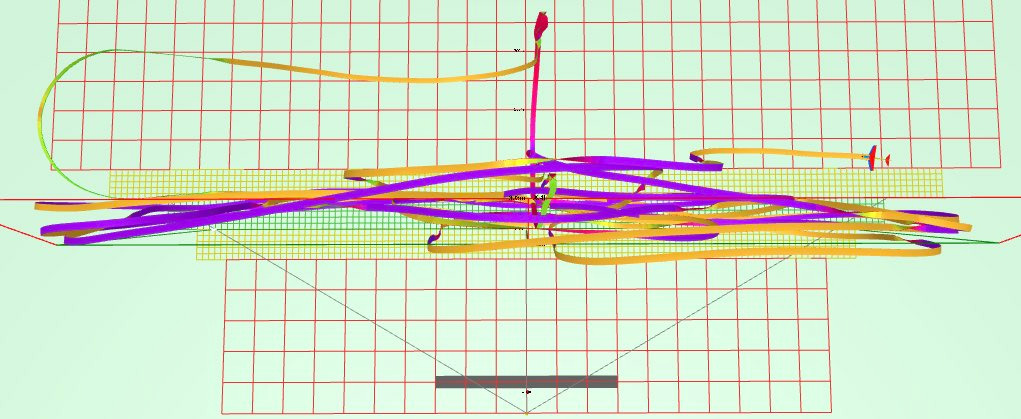
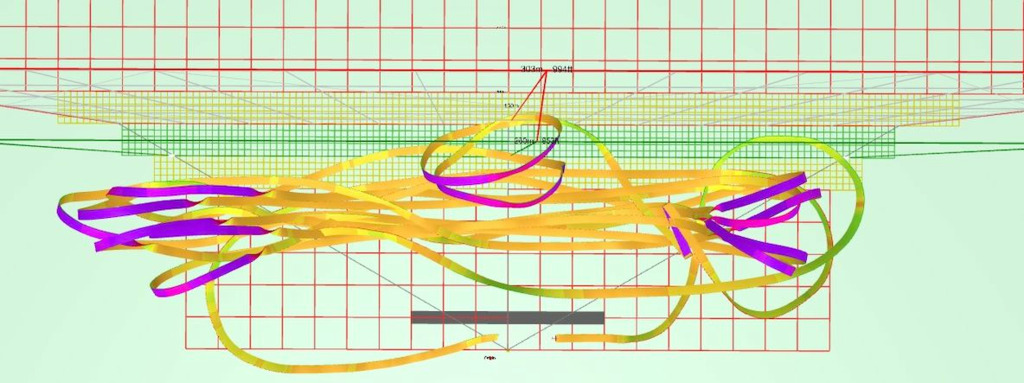
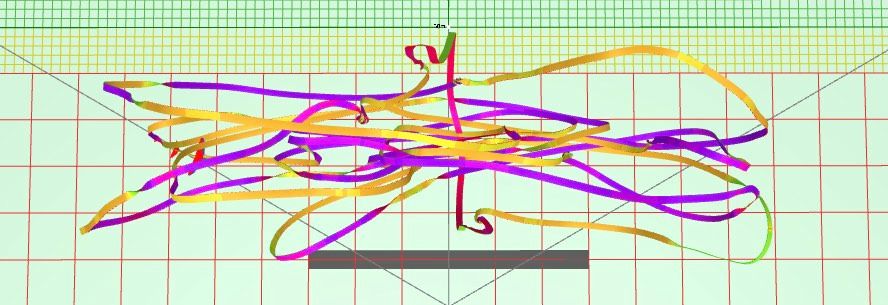
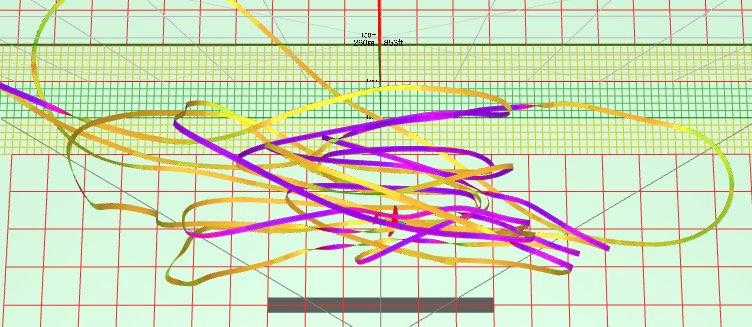
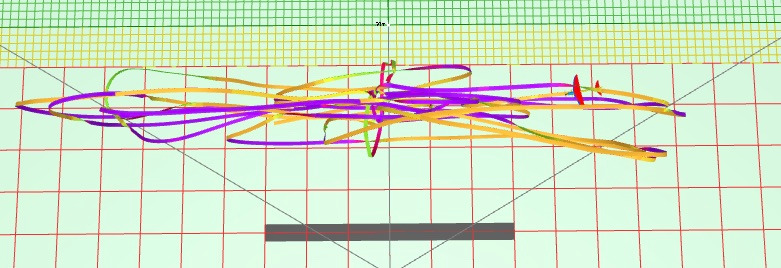
こうしてみると、何をしたら良いのかが分かってきますね。
soramon様
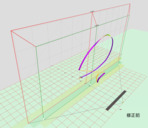
貴殿のご提案による単純移動平均を用いたJSONファイルの修正ができましたので、ご報告致します。下図に、修正前のリボントレースと単純移動平均による修正後のそれを示します。
以前のGPSの値を用いた修正の場合と比較して、ジャンプ前後の飛行軌跡は少し滑らかになりました。しかし、データの修正開始位置において飛行軌跡が折れ曲がっています。また、ジャンプの状況によって、データ修正の開始及び終了位置や単純移動平均するデータ数を適切に選ぶ必要があり、少し厄介です。今回、単純移動平均したデータ数は前後2秒(データ数50個)で、ジャンプ前の4秒からジャンプ後の2.8秒間を補正しています。
また、下図は修正したデータを示しており、縦軸はJSONファイルにおけるNED座標のN(m)です。黒線が修正する前で赤線が修正後の値を示しています。データ修正の入口のところで赤線が折れ曲がっており、リボントレースもこの位置で折れ曲がっています。
今後はカルマンフィルターによる補正なども考えてみたいと思います。以上、ご検討頂ければ幸いです。