機械学習を行うにあたり、リボン図のジャンプを数値化する必要があります。下図はLOGファイルにおけるGPSの位置データとカルマンフィルターによる位置の推定値を示しています。

ジャンプの前で両者にずれが生じていることが分かります。そこで、このずれをジャンプの指標とすることにしました。
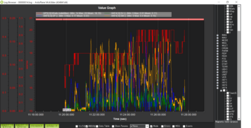
下図は機械学習による解析結果を示しています。横軸は、LOGファイルに記録されているパラメータの中で、特にジャンプに関係すると考えられるパラメータです。それぞれのパラメータの意味については、下記のURLを参照してください。縦軸は、ずれに対する影響度を表しており、正負ともに数値が大きくなるほど影響が大きいことを示しています。
https://ardupilot.org/copter/docs/logmessages.html

この図から、ずれに対してNSatsが特に大きな影響を及ぼしていることが分かります。NSatsはGPS衛星の捕捉数を表しており、衛星の捕捉数が少なくなるとずれが大きくなり、ジャンプが発生することを示しています。
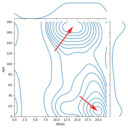
次に、下図は各パラメータ間の相関の強さを表すヒートマップです。白に近いほど正の相関が強く、黒に近いほど負の相関が強いことを表しています。

ずれに大きな影響を与えるGPS衛星の捕捉数を表すNSatsはHDop及びHAccに強い負の相関があることが分かります。HDopとHAccの両者は共にGPSの水平方向の測定精度を表しており、両者とも大きくなるほど測定精度は悪くなります。したがって、衛星の捕捉数が少なくなるほどGPSの測定精度が悪くなり、ジャンプが発生することになります。
また、NSatsと機体の水平方向からの傾きを表すPitch(上向きが正で単位は度)にやや負の相関があることが分かります(白い矢印)。そこで、両者の関係を調べてみました。下図はデータ数の等高線を示しています。

Pitchが+90度および-90度に近くNSatsが0となる領域(赤い矢印)でデータ数がやや多くなっています。つまり、垂直上向きあるいは垂直下向きの機体姿勢では衛星の捕捉数が0になる割合がやや高いことになります。機体の姿勢が垂直の姿勢で衛星の捕捉数が少なくなるのは、GPSのアンテナが横向きになるためと思われます。
以上、機械学習による解析の結果、あらかじめ予想した通りの結果しか得られませんでした。但し、経験的に得られていた関係性を定量的に裏付けすることができた点に本解析を行った意義があるものと考えています。なお、本解析に用いたデータ数は約8,000で、全てP-23のフライトデータです。
本解析を実施するにあたり、いまにゅ氏による下記のYouTubeを参考にさせて頂きました。いまにゅ氏に感謝申し上げます。
https://www.youtube.com/watch?v=MulTGYX5JS0

Flight Coach BBS
機械学習によるジャンプに影響を与えるパラメータの分析
24
コメント
984
views
2
フォロー
履歴通報 ...
前報に引き続き、ロール角のジャンプへの影響を調べてみました。前報で、リボン図のジャンプに対してGPS衛星の捕捉数を表すNSatsの影響が大きいことが分かっていますので、今回はNSatsとRollの関係を機械学習を用いて調べてみました。なお、Roll(機体のロール軸回りの傾きで水平から右回りを正とし、単位は度。-180 <= Roll <= +180)の正負がNSatsに与える影響に違いは無いと考えられますので、今回はRollの絶対値を用いています。PitchのNSatsに与える影響は前報でやや大きいことが分かっていますので、今回はPitchが正のデータ(機体姿勢は水平から上向き)のみ用いています。下図は、各パラメータ間の相関の大きさを表しています。

前報で報告したように、NSatsに関してHDop及びHAccに強い負の相関があることが分かります。また、Pitchにもやや強い負の相関があります。さらに、今回Rollにもやや強い負の相関があることが分かりました(白い矢印)。そこで、NSatsとRoll間の関係をデータ数の等高線図を用いて調べました。下図はその解析結果を表しています。
Rollが0に近いとき(機体姿勢が正面)、データ数のピークはNSatsが20の領域にありますが、Rollが180に近いとき(機体姿勢が背面)は、データ数のピークはNSatsが13, 14の領域になります(赤い矢印)。したがって、機体姿勢が背面になると、衛星の捕捉数が減少することになります。衛星の補足数は12以上あることが推奨されています。また、GPSデータの取得は0.2秒毎に行われていますので、背面のまま数秒間飛行を続けるとジャンプが発生する可能性が高くなると考えられます。なお、今回の解析に用いたデータ数は約6,500で、全てP-23のフライトデータです。
今回は、機械学習を用いてロール角のジャンプへの影響を調べてみました。本解析結果はデータ取得に用いた機体特有の問題かも知れません。皆さんのフライトデータでもご確認頂ければ幸いです。
ジャンプ現象の解析を拝読しました。
素晴らしい解析ありがとうございました。
この頃は私の装置ではジャンプが見られず、ほぼ100% OKです。
下側水平ラインを可能な限り高い位置(50m以上)で飛ばすように心掛けているのみです。
しかしながら、他の方は前とは違う位置、正面での上昇時に発生しやすい、ジャンプ現象は依然として出ます。
新アプリのジャッジでの自身のフライト再現もできるようになりました。
この素晴らしい新アプリを有効利用するためにも、ジャンプ現象を抑制できるようになれば最高です。
TakJP様の解析結果の背面、上昇、降下時の衛星捕捉数がこの現象に影響しているのは何となく感じていました。
データからも実証されたのでスッキリしました。
GPSのアンテナの配置を水平線から45度(垂直尾翼の前縁と平行)傾けて配置すると、水平、背面、上昇、降下時の衛星捕捉数の平均化が図れると思うのですが、単純な考えです。如何でしょうか。
この場合、衛星捕捉数が最も少ないと予想されるのは背面での45度降下と考えます。
明日から実験してみようと思います。
現状ではジャンプ現象の発生がないのでミッションプランナーの解析から違いを見てみます。
moon様
早速、私の稚拙な解析をご検討頂き、ありがとうございました。
私もmoon様同様ジャンプ現象を無くしたいと考えています。特に演技のやり直しができないような状況、例えば競技会などでのFlight Coachの使用を考えると、ジャンプ現象の発生は許されません。私は次の2点を目的に、これまでジャンプの解析を行ってきました。
1.そもそもジャンプが発生しないような方策を考える。
2.もしジャンプが発生してしまった場合でも得られたデータを修正することによって、そのジャンプをリボン図から取り除くことができるような方策を考える。
まだまだ道半ばですが、以前に比べると少しですがジャンプの発生状況やある特定の条件でのJSONファイルにおけるジャンプの修正方法が分かってきました。ジャンプ現象を無くす対策について、もう少しもがいてみようと思います。
さて、今回moon様よりご提案頂きましたジャンプ現象の発生を少なくする対策についてですが、妙案かと思います。確かに、背面での45度降下時は衛星捕捉数が少なくなると予想されますが、GPSからのデータ取得は5Hzですので短時間であれば問題ないように思います。GPSアンテナがもう少し小さくなれば、GPSアンテナを配置を変えて複数個設置するような方法もあるかもしれません。
Ardupilotにとってはそもそも機体姿勢が垂直や背面になることは想定外と思われますので、カルマンフィルターによる推定方法のアルゴリズムを修正する必要があるのかもしれませんが、これらは私にはハードルが高すぎます。
それでは、moon様もし実験結果が得られましたらお知らせ頂ければ幸いです。
今日のフライト結果は惨敗でした。
GPSを5回の全てのフライトで大きなジャンプ出まくり、ミッションプランナー解析ではコンパスエラーが表示されていました。
思慮不足でした。
少し時間は掛かりますが、このコンパスエラーを対策して再度の検討を行う予定です。
GPS内蔵の電子コンパスは向きだけ注意すればよく、傾斜をつけてもOKと考えていましたが、傾斜補正機能付きではないようです。
使用したGPSは、コンパス基板と一体型のためGPSアンテナを45度傾斜するとコンパス基板まで45度傾斜します。
コンパスは水平に置くのがmustのようです。
今回のP23フライト時のデータ比較です。
最初の数字は45度傾斜時のもの、二番目の数値は水平に再度置いた際のジャンプ無しの今日のデータです。
各々一例のみデータです。
45度傾斜の場合、
衛星捕捉数は、やや低下するように見える。
水平方向の精度(捕捉数)は、水平より低下傾向に見える。
衛星捕捉数(NSats) : 7~17 @45度傾斜、 11~18 @ 水平
水平方向の精度(HDop) : 0.6~1.5 @45度傾斜、 0.65~0.95 @ 水平
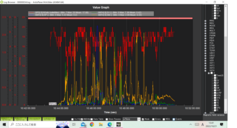
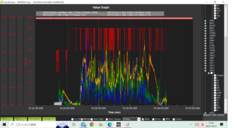
<ご参考まで>
下記数値は、推定値とセンサーからの算出値を比較し誤差を示したものと考えます。
GPS 45度傾斜したデータは、コンパスエラーのため各数値が大きく頻度も多く出ています。
閾値は0.6以上、閾値オーバーが継続するとジャンプするようです。
45度傾斜の場合、
当然ながらコンパスエラーは大きい。
位置エラーは、GPS捕捉数が低下したため、各演技ごとに大きめに出ている。
速度エラーも、GPS捕捉数が低下したため、各演技ごとに大きめに出ている。
位置エラー(XKF4_SP) : 0~0.9 @45度傾斜、 0~0.3 @ 水平
コンパスエラー(XKF4_SM) : 0~2.0 @45度傾斜、 0~0.5 @ 水平
速度エラー(XKF4_SV) : 0~7.0 @45度傾斜、 0~2.4 @ 水平
GPSを45度傾斜し取りつけた際の写真です。
moon様
早速実験して頂き、ありがとうございました。ご指摘の通り一体型の場合難しそうですね。
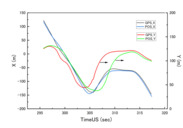
ところで、LOGファイルを眺めていたところ、下図のようにジャンプが発生しなくても衛星捕捉数が少なくなるとGPSの位置情報とカルマンフィルターによる位置の推定値POS( = JSONファイルの位置情報)にずれが生じています。
これらをPlotterで用いているPilot座標(原点がPilot位置)に変換してみますと、下図のようになります。
X軸がPilotから見て右方向、Y軸が前方です。X方向は両者に違いは無いのですが、Y方向は大きく異なっています。つまり、同じ時刻では前後方向に大きいところで数十mずれています。実際のところ、カルマンフィルターによる推定値、つまりリボン図の方がGPSの値よりも正しいと思われますが、いずれにしてもジャンプが無い場合でも衛星の捕捉数が少ない場合には注意した方が良さそうですね。
TakJP様 多岐にわたる情報ありがとうございます。
GPSアンテナとコンパス付き基板を分離(最下段に詳細記述)し、再チャレンジしました。
結論から、
母体数が少ないため、45度傾斜での衛星捕捉数の平均化の効果は継続調査します。
良い感じです、まずは最初の比較結果です。
以下の感想は、私見を含みますのでご容赦ください。
5フライトしました、すべてジャンプは無くOKです。
GPSアンテナを45度傾斜と水平に配置したP23フライトの各5例の比較です。
水平は前日データ取得、45度傾斜は今日のデータです。
両日ともにスマホによる衛星チェック結果は42~45程度の衛星捕捉数、ほぼ同条件と思います。
45度傾斜したものは、
衛星捕捉数(NSats)は水平時と同等、最低値が少し高い感じがする。
水平方向の精度(HDop)は同等か数値が大き目にでるので精度は少し低下するように見えます。
カルマンフィルタによる推定値とセンサーからの算出値を比較した誤差について、
45度傾斜したものは、
位置エラー(XKF4_SP)は水平時とほぼ同等です。
コンパスエラー(XKF4_SM)は平均値、最大値が小さ目に出ます。
速度エラー(XKF4_SV)に大きな差が出ます。平均値、最大値共に小さく、水平に比べて最大値は1/2~1/15の値です。、5フライト全て最大値0.5以下です。
比較の一例です。
データを添付します。上が45度傾斜のもの、下が水平時のものです。
衛星捕捉数(NSats) : 14~18.71~20 @45度傾斜、14~18.15~20 @ 水平
水平方向の精度(HDop) : 0.65~0.68~0.8 @45度傾斜、0.59~0.64~0.74 @ 水平
下記の閾値は0.6です。
位置エラー(XKF4_SP) : 0~0.03~0.24 @45度傾斜、 0~0.03 ~0.17@ 水平
コンパスエラー(XKF4_SM) : 0~0.12~0.34 @45度傾斜、 0~0.15~0.40@ 水平
速度エラー(XKF4_SV) : 0~0.08~0.47 @45度傾斜、 0~0.11~0.91 @ 水平
<手持ちGPSの改造>
使用GPSはケース入りGPSをケースを外し使用していたものです。
GPSアンテナ(セラミックの四角い茶色)はコンパス基板と一体型のため、アンテナと基板との半田付けと接着部を剥がして分離型に変えました。
BN-880であれば、両面テープによりアンテナと基板が接着されているのみです。
半田を外す必要はなく簡単にできると思います。自己責任でお願いします。
moon様


詳細な実験データをご報告頂き、ありがとうございました。画像を拝見しますと、45度傾斜の方がNSatsの値も全体的に大きいようですし、それぞれの誤差の値も小さく見えます。moon様のご賢察の通り結果が出ているように思えますが、如何でしょうか。45度傾斜の効果が期待されます。
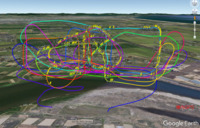
私の方でも衛星の捕捉数が少なくなる原因を更に探ってみました。下図は、以前別のトピックで報告致しましたKMZファイル作成プログラムを用いて、P-23のLOGファイルのPOS位置データをKMZ形式に変換し、Google Earth上に表示させたものです。図中には、NSatsが12以下となる位置(ArduPilotでは12以上が推奨値)も黄色いピンで表示させました。
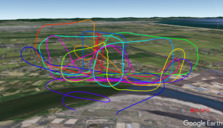
この図ですと、込み入っていて分かり難いので、トライアングルのみ抜き出して表示させたものが下図です。
この図を見ますと、機体姿勢が背面の時にNSatsが12以下になる割合が多いように思います。他のマヌーバも調べた結果、機体姿勢が垂直あるいは背面の場合にNSatsの値が小さくなるように思われます。機械学習で得られた結果と同様な結果となりました。もう少し他のフライトデータも調べてみたいと思います。
前報のGoogle Earthの画面ではNSatsが12以下になるときの機体の姿勢が良くは分かりませんでしたので、画面中に機体姿勢のロール角Roll(機体のロール軸回りの傾きで水平から右回りを正とし、単位は度。-180 <= Roll <= +180)を表示させました。トライアングル・ループのマヌーバを下図に示します。


図中のピンのラベルで、最初の数字がマヌーバの種類を、2番目の数値がRollを表します。前報で報告したとおり、背面に近い姿勢のときにNSatsが12以下になる割合が多いように見えます。
下図はハーフ・スクエアー・ループの場合です。
この場合は、ロール角に関係なくNSatsが12以下になっているように見えます。
このように、垂直姿勢ではロール角に関係なく、また垂直姿勢以外では背面に近い姿勢のときにGPSの衛星捕捉数が12以下になる割合が多いようです。
TakJP様
分かり易いビジュアルな画像、情報をありがとうございます。
場所的なものか、他条件が違うのか、衛星捕捉数12以下の再現ができません。
フライトコーチを2台搭載し、45 度傾斜したものの衛星捕捉数を調査しました。
比較対象のフライトコーチはGPSアンテナが水平配置の従来のものです。
条件:
P23を6回フライト、ミュゼット単葉のキャノピー内にフライトコーチを縦列配置とし、3回は45度傾斜のものを後側の定位置とし、前側には比較対象の水平のものを配置。残りの3回は前後を入れ替え配置。
フライトコーチを横列配置での比較が理想ですが、物理的制約から断念しました。
注意:
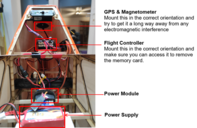
前側への配置はモータ、ESCに近い(5cm程度の距離)ため、電磁波等による各センサへの干渉度が大きく、特にコンパスのエラーは倍以上になっています。
機体搭載時の写真(前後入れ替えたもの)を参照ください。


本日は晴天、スマホ衛星状況は45~47程度で良好です。
結果は、
45度傾斜したものは、
水平のものに比べて悪化データはありません。
前回同様に衛星捕捉数は高めに出ます。
各エラーも少ない傾向にありジャンプ現象抑制に効果があるようにも思います。
衛星捕捉数(NSats):
前後側の配置にかかわらず最低値、平均値が高めに出る傾向にあり優位。
エクセルに簡単に纏めましたのでデータ参照ください。
位置エラー(XKF4_SP):
優位です。45度傾斜は最大値が0.6オーバーが3フライト、水平のものは0.6オーバーしたものが5フライト、最大値も高めに出る傾向がある。
コンパスエラー(XKF4_SM):
優位です。45度傾斜のものを後側に配置した場合は全フライトで0.36以下、前側に配置した場合は0.75,1.04,1.86が最高値であるが平均値は最大でも0.29と小さい。
水平のものは、配置に関わらず全フライトでの最大値は1.21~4.31と高く、平均値も0.33~0.93と高めに出る。
速度エラー(XKF4_SV):
優位です。45度傾斜のものを後側に配置した場合は全フライトで0.35以下、前側に配置した場合の最高値0.25,0.24,6.36であるが0.6オーバーは1フライトのみ、平均値は最大でも0.1以下と小さい。
水平のものは、配置に関わらず0.6オーバーは3フライト、平均値も0.11~0.14と高めに出る。
moon様
詳細な検討結果を報告頂き、ありがとうございました。衛星捕捉数に関してですが、私のフライトデータで捕捉数12以下が多いのは私の搭載機体特有の問題かもしれません。私が使用している機体のキャノピーはカーボン製です。GPSアンテナは重心のやや後ろに搭載してありますので、特に正面で45度上昇の時、GPSアンテナの真上にカーボン製キャノピーがくる姿勢になりますので電波が届きにくくなるのかもしれません。カーボン製キャノピーを使用している機体では注意する必要がありますね。機会がありましたらカーボン製以外のキャノピーを使用している機体で試してみます。
さて、moon様の実験結果ですが、NSatsの値、XKF4の値のいずれも45度傾斜の優位性を示しています。moon様のご賢察の通り、GPSアンテナとIMUを分離できるFCの場合は、GPSアンテナを45度傾斜させた方が良さそうですね。ところで、45度傾斜は前向きの方が良いのか、あるいは後ろ向きの方が良いのか、どちらでしょうか。私の予想では、演技構成によりそうですね。P-23の場合、垂直下降より垂直上昇の演技時間の方が長いので、P-23の場合は前向きに45度傾斜させた方が良さそうに思えますが。
TakJP様
45度傾斜の優位性、各エラーが低減できることが一番です。
前傾、後傾かは今後検討する予定ですので調査後にお知らせします。
45度傾斜程度では対策不可能なことが、、。
本日、Top Stage70が来ていたので45度傾斜のフライトコーチを重心位置の胴体のバッテリー上部に搭載させて頂きデータを確認しました。仰るとおりカーボンキャノピー内での衛星捕捉が著しく低下することを実感しました。経験したことのない低い衛星捕捉数、カーボン多用のF3Aフルサイズ機では共通の弱点なのかも知れません。GPSアンテナの位置にまで対策が必要とも思えます。
Flight Coach orgの製作記事の搭載位置です。
この例では、キャノピー部を避けて後方の胴体上部のバルサ材部にGPSを取り付けています。
本日飛ばしたミュゼット単葉はジャンプは皆無でしたが、Top Stage70のフライトではジャンプが2カ所で発生しました。垂直降下時と上昇時のロール後に発生しています。
大きいジャンプはハーフ8の垂直降下後からおかしくなり始めロール切返しまで、
小さいジャンプ(ズレ)はETの垂直上昇時のロール後から水平に遷移する時に発生しました。写真を参照ください。
比較データを添付します。
上がTop Stage70(TS)のもの、
衛星捕捉数は最低7まで低下、精度、エラーは2~20倍程度に悪化します。
下がミュゼット単葉(Mu)です。
衛星捕捉数(NSats) : 7~17.08~20 @TS、 17~19.68~20 @ Mu
水平方向の精度(HDop) : 0.56~0.65~1.93 @ TS、 0.56~0.59~0.72@ Mu
下記閾値は0.6です。
位置エラー(XKF4_SP) : 0~0.2~5.43 @ TS、 0~0.03 ~0.21@ Mu
コンパスエラー(XKF4_SM) : 0~0.33~2.09 @ TS、 0~0.13~0.37@ Mu
速度エラー(XKF4_SV) : 0~0.42~7.36 @ TS、 0~0.09~0.38 @ Mu
moon様
詳細なご報告、ありがとうございます。データを拝見しますと、衛星捕捉数、GPS精度共にTop Stage70の方が悪いですね。やはり、カーボンの影響が大きいのでしょうか。F3Aフルサイズ機ではキャノピー以外にもカーボンが使用されていますので、それらの影響も気になります。一番の解決法はGPSアンテナを機外に出す方法かと思いますが、現状のGPSアンテナの大きさではそれも現実的ではないですね。もう少し小さくなれば可能かもしれませんが。
一方、自作の機体であれば、GPSアンテナを入れるスペースを機体表面に予め設けることが可能かもしれませんが、既製品では工作が難しいですね。Flight Coachがもっと普及すれば、GPSアンテナを入れるスペースが予め設けてあるF3Aフルサイズ機が発売されるかもしれませんね。
TakJP様
置き場所は難しそうですね。
現状でのジャンプは物理的な解決方法のみと思います、フライトコーチはカーボンによる電波遮断が発生しないような所に置くのがMUSTとしか言えません。
本日はフライトコーチから離れました。
遠方からミュゼットを持参された方のダイレクトモータ+大口径ぺらの組合せでの全回転域ガバナーESCの設定と飛行確認を行いました。スロットル操作等を加味しパラメータを設定、初回設定値で気に入られフルサイズ並みの落ち着いた大きな演技をこなしていました。風切り音のみの驚きの清音です。ギアーダウン、ベルトダウンに比べるとなんとも心地良く
ダイレクトモータに戻してみる予定です。
さて、キャノピー等のカーボン繊維を樹脂で固めたものは導電性があります。
電波を強力に遮断します。
代表メーカーの東レのページです。
釈迦に説法ですが、
GPS衛星電波はほぼ1~1.5GHz帯と思いますので90%以上の電波遮蔽率です。
https://www.plastics.toray/ja/technical/torayca/tec_001.html
2.4GHz帯受信機もカーボンに電波遮断され障害を受けることは周知と思います。
グラスファイバー製であれば問題ないと思いますが、カーボンに遮断された状態でのフライトのログデータは概略は合っているように見えても品質の面では疑問に感じます。
フライトコーチのGPSで万が一受信ができても、品質は低下した電波と思います。
私感ですが、エラーの多いときの再現フライトは少しづつズレが発生、程度が悪い場合はスライド、ジャンプに繋がることが何度もありました。
moon様
カーボン樹脂の情報を頂き、ありがとうございました。カーボン樹脂の電波遮断率は90%以上とのこと、ほとんどの電波が遮断されてしまいますね。F3Aフルサイズ機では、多くの機体はキャノピーのみならずモーター周りやスピナー、プロペラに至るまでカーボン樹脂が使用されていますので、特に垂直に近い上向き姿勢の際は注意が必要ですね。スライドやジャンプが無い場合でも、GPSの衛星捕捉数が12以下になる場合は、HDop, VDop, XKF4などのGPSの測定精度やカルマンフィルターの推定精度を示す数値に注意する必要があります。
TakJP様
スマートキーの電波遮断用盗難防止ケースにも使用されています。
カーボンはある意味では要注意です。
例えば 1面でも4面でもカーボンで囲まれた場合の全方位での電波障害の懸念は絶大です。
さらに指向性の強い2.4GHz帯の受信機でも同様と考えます。
皆様どのように対応しているのでしょうか。
moon様
以前、舵を切ったときの挙動に違和感を感じることが何回かありました。その原因につきましては、ネットでもいろいろと言われていますように、良く分かっておりません。現在は、フタバ製のデュアルRXリンクシステムを使用しています。このシステムを使用してからは、特に違和感を感じることはございません。
TakJP様
将来のリモートIDも同様ですね。
2.4GHz帯ですので受信できない場合は某筋からのお咎めも、発信者責任にならなければ良いのですが。
閑話休題
フライトコーチでのデータの品質確保のため、自己責任において少しずつ電波環境を改善していくしか無いですね。
多くの方が努力すれば、デュアルGPS、デュアル型フライトコーチが将来はできるかも知れません。
これまでの分析から、GPSによるデータ取得エラーにカーボン樹脂製のキャノピーが関与しているのでは、と推測しました。そこで、下記の写真のようにFlight Coachを機外に出してフライトしてみました。

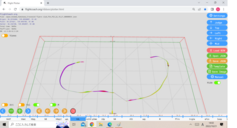
下図は、従来通りFlight Coachを機内に設置したときのP-23の飛行軌跡をGoogle Earth上に表示したものです。
図中の黄色いピンはGPS衛星の捕捉数NSatsが12未満(ArduPilotは12以上を推奨)となる位置を表しており、ピンのラベルの最初の数字はマヌーバの種類を、2番目の数値は機体姿勢のロール角を示しています。前報で報告しましたように、NSatsが12未満となる回数がかなり多いことが分かります。
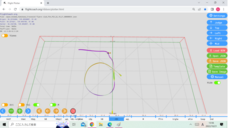
下図は、本日Flight Coachを機外に出してフライトした結果です。
曲技内ではNSatsが12未満になることは一度もありませんでした。次に、GPSの測定精度並びにカルマンフィルターの推定精度を表す各パラメータを調べてみました。結果は下記の通りとなっています。
【機内GPS】
NSats: 0(min.)~15.54(average)~19(max.)
HDop: 0.59~1.44~99.99
XKF4_SV: 0.01~1.05~15.63
XKF4_SP: 0~0.14~1.45
XKF4_SM: 0~0.21~0.46
【機外GPS】
NSats: 12(min.)~19.99(average)~23(max.)
HDop: 0.51~0.57~0.80
XKF4_SV: 0.01~0.13~2.70
XKF4_SP: 0~0.06~0.57
XKF4_SM: 0~0.24~0.43
このように、Flight Coachを機外に出した場合、NSatsが12未満、並びにHDopが2以上(ArduPilotは2未満を推奨)になることは一度もありませんでした。このデータを見る限り、Flight Coachを機外に出すことにより、GPSのデータ取得状況がかなり改善されたことが分かりました。その理由として、
1.Flight Coachがモーターやバッテリーから離れたことによりノイズが低減された。
2.Flight Coachを機外に出すことにより、キャノピーやその他カーボン樹脂による電波遮断の影響が低減された。
などが挙げられます。このどちらが、あるいはこの両者がGPS状況の改善に寄与したかは現状では不明ですが、いずれにしてもFlight Coachを機外に出すことによりGPSのデータ取得状況が大きく改善されることが分かりました。
Flight Coachを機外に出す方策として写真のままですとフライトに影響しそうですので、できれば機体表面に埋め込みたいのですが、既存の機体ですと工作が難しそうです。機体を製作できる方はフライトに影響が出ないように初めからGPSアンテナを入れるスペースを機体表面に設けておくと良いかもしれません。
TakJP様
確認試験ありがとうございました。
捕捉数、精度、およびエラーの違いに驚きました。
紛失、機体へのダメージが無いようで良かったです。フライトコーチのPixhawk4 mini+M8N GPSはフライトコーチ製作のお手本となっているものです。非常に高価ですが、CPUはじめ、各種センサ、当然GPSも一級品を使用していますので性能は群を抜いています。大事な機体と入手困難なフライトコーチ機材ですので無理をしないようにお願いします。
moon様
コメントを頂き、ありがとうございました。
Flight Coachを機外に出した効果については、私も驚きました。やはり、GPSの測定エラーに対してカーボン樹脂の電波遮断の影響が大きいと推測しています。
私には機体の工作技術がありませんので、Flight Coachをどのように搭載するか、は悩ましいところです。
なお、以前の投稿の中で、GPS衛星の捕捉数NSatsを"12以下"と記述したのは"12未満"の誤りですので、訂正させて頂きます。
TakJP様
別トピックの[ebayからのPathFinder名称のフライトコーチ]にTakJP様の本トピックの情報を使用させて頂きました。
衛星捕捉不足はプロッタ上においてスライド現象を生じさせていました。
その解析です。
https://zawazawa.jp/flightcoach/topic/22
moon様
情報をご教示頂き、ありがとうございました。
衛星捕捉数が少なくなると、例えジャンプがなくリボン図が正常に見えても、スライドなどのエラーが生じることがあるのですね。私も本トピックの以前の投稿(10/16付け)で、ジャンプが発生しなくても衛星捕捉数が少なくなるとGPSの位置情報とカルマンフィルターによる位置の推定値POS( = JSONファイルの位置情報)にずれが生じることを報告させて頂きました。リボン図が正常に見えても、衛星の捕捉数やGPSの測定精度、カルマンフィルターの推定精度を細かくチェックする必要がありそうですね。
TakJP様
頂いた情報は私には非常に役に立ちます、いつもありがとうございます。
詳細に入るほど手間が掛かります。フライトコーチ使い始めは動作すればOKでしたが、目が肥えてくると色んなバグが出てきます。3次元+3次元の解析、難しい技術の集合体での解析は解っているのですが、ユーザー側でなんとか対応するしかないと思います。今後も有益な情報提供をお願いいたします。