お世話になります。
さいたま市の桜区で飛ばしてますが、昨年の暮にクラブの飛行場をフライトコーチに登録しました。
今日、Map確認のついでにFAQを見たら50mが120mになってるようなので、実際確認してみると
「・・・than 120m from the origin」というエラーになりました。
以前はoriginが50m以上離れていると「・・・than 50m from the origin」というエラーが出てたんですが、
50m問題が120mに改善されたんですね。
このBBSも取り上げられていましたね。
I’ve been involved in pattern for quite a while and this is the most powerful tool ever! BE WARNED, your flying is not as good as you think!
「あなたのフライトはあなたが思っているほど良く無い」
まさにその通りで、初めて自分のリボン図を見た時は驚きました。

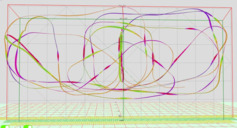
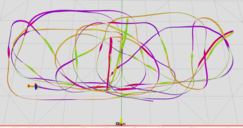
大きさの異なる機体のリボン図を同時に表示してみます。
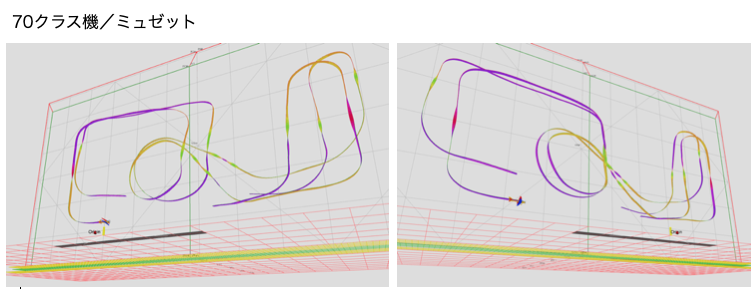
まずは、70クラス機とミュゼット
次は、フルサイズ機とミュゼット
こうする事で練習の課題が見えて来ます。
・パートループ(部分宙返り)を描いている時のRは一定。
・1つの演技内でのRは同一。
・ロールの前後にはラインが必要で、その長さは同一。(インメルマンを除く)
なるほど。やってみたら上手くいきました。
助かりました。
ありがとうございます。
Plotterの(v3.2.2H)は、"version": "1.3"のjsonファイルが「Open JSON」で開けなくなったようですね。
jsonファイルをエディタで開き、一行目の"version": "1.3",を"version": "1.2",に書き換えたら開けました。
その後「Save JSON」で保存し直すと"version": "1.3"に戻りますが、「Open JSON」でも開けました。
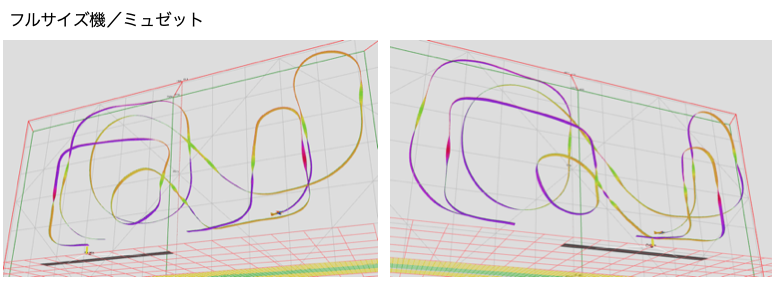
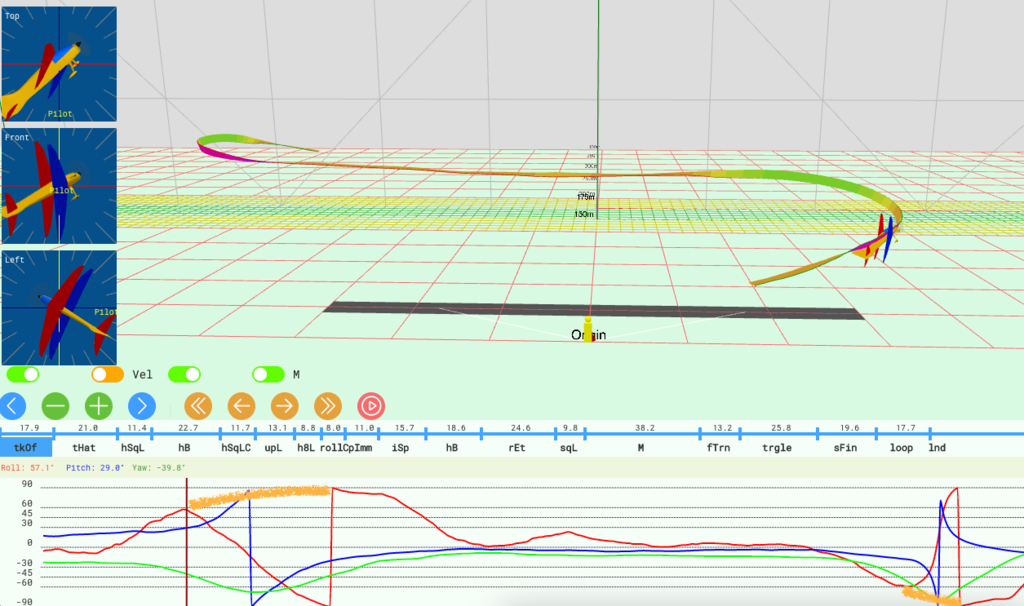
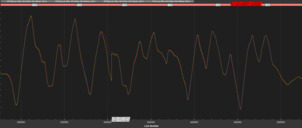
最後は「赤→ロール」についてです。
水平飛行に於いては、Leftビューを見れば、
「水平面に対して左に傾斜が+」
「水平面に対して右に傾斜がー」と、なっている事がわかります。
・
・
ただ、垂直やクロス方向に飛行する時は、Leftビューではロールが見えないので、その時はTopビューやFrontビューを見ることになります。
・
・
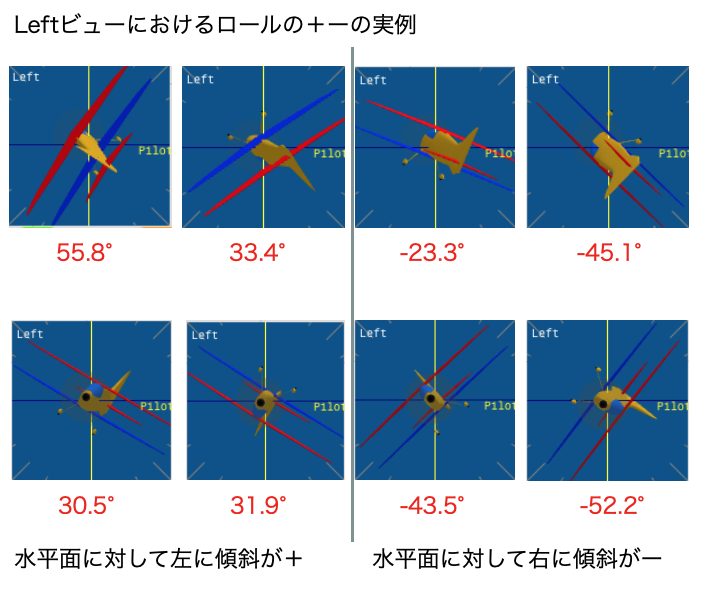
さて、そうこうしているうちに疑問点が出て来てしまいました。
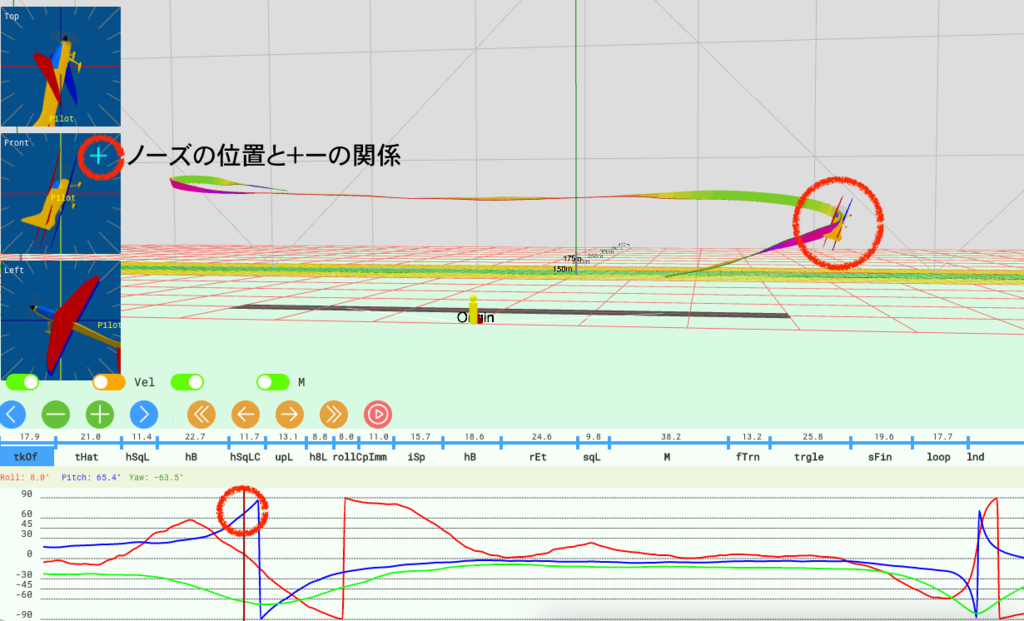
それは水平ターンをしている時の赤線の変化です。
私の今の考えではオレンジ(2カ所)の様なグラフになると思うのですが、
何故か実際は赤線の様になっているのです。
この赤線はなぜ途中から反対側にロールする様になるのでしょう。
他にもファイターターンなどでも見られる現象なので、興味を持たれた方は調べてみてください。
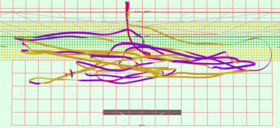
1月22日、トップビュー画像を一枚追加。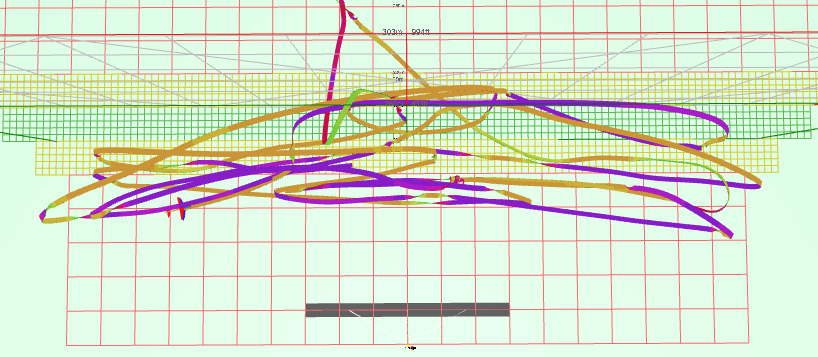
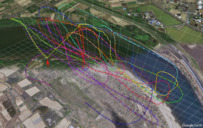
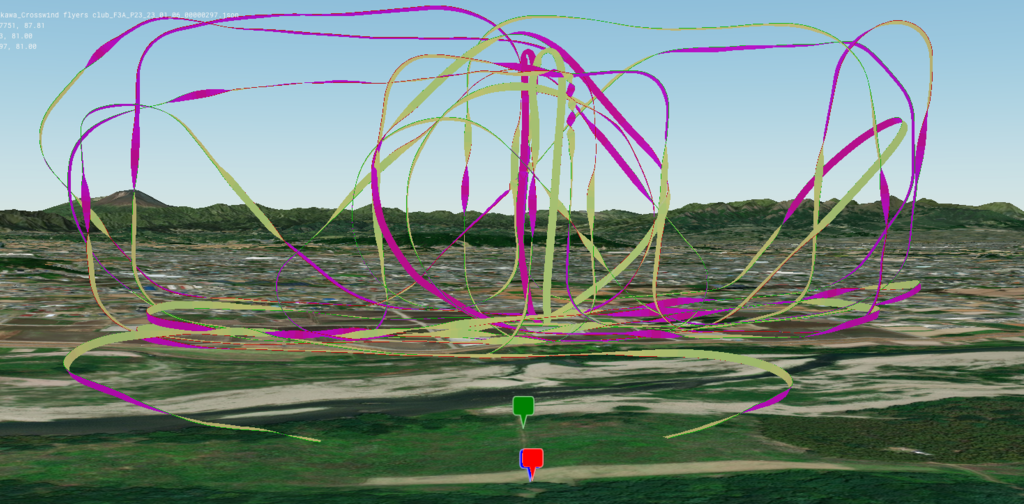
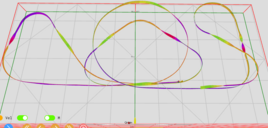
今回もGPSアンテナを2つ上向きで並べて配置し、"GPS Blending"機能を使用してGPSエラー発生の有無を調べました。下図はLogファイルのPOSデータをGoogle Earth上に表示させたもので、各マヌーバを色分けして表示してあります。飛行機のアイコンはその位置における機体の姿勢を示しており、赤は機体の上面を、青は下面を表しています。フライトパス上の白い四角マークはPrimary GPSユニットにより補足された衛星の数が12未満となる位置を表しています。前回の同様の配置でフライトしたときと比べて大きなジャンプは無くなりましたが、下図の矢印で示すような小さなジャンプは未だ残っています。今回大きなジャンプが無くなったのは、GPSユニットの学習機能が働いたせいでしょうか。

各GPSユニットから出力された緯度データを比較すると、下図のようになります。前回と同様、赤がPrimary、緑がSecondary、青がBlended GPSを表しており、ベージュがPOSデータであり、カルマンフィルターを通して最終的に出力される緯度データで、Plotterで描画するときに用いられるデータです。黄色い縦線はPrimary GPSのNSatsが0となり、HDopが99.99となる位置を示しています。
Primary GPSの測定精度が大きく悪化し、Blendする際のPrimaryとSecondaryの出力データの重みが変化したときの前後でジャンプが発生する様子が分かります。赤い矢印のジャンプの幅は距離に換算すると9.61mです。
カーボン製キャノピーやモーター周りにカーボン部材を使用しているにもかかわらず、GPSアンテナが1つの場合に見られた大きなジャンプは、2つのGPSユニットを用いた"GPS Blending"機能を用いることによってほとんど見られなくなりました。ただし、小さなジャンプは未だ残っており、"GPS Blending"機能について更なる調査が必要です。
次は2段目のFrontビューと「青→ピッチ」の関係を見てみます。
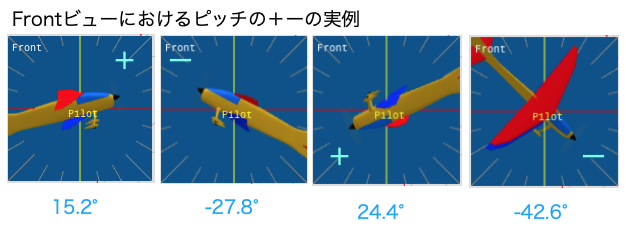
Frontビューは、 機体をパイロット側の面から見たもので、視点は機体と同位置・同高度です。
ピッチと言っても機体のエレベーター方向の話ではありません。
上記「ヨー」と同じく飛行演技面における機体の見え方の話です。
要は、ノーズが画面上で上下方向のどこを向いているかということです。
ここでのピッチは水平線に対する上下だけでなく、垂直線に対しての左右も関係するので、+ーは画像の様に90度毎に区分けされています。
例えば、次の画像にあるターンですが、ノーズが向こう正面を向く前後で、+ーが反転しています。
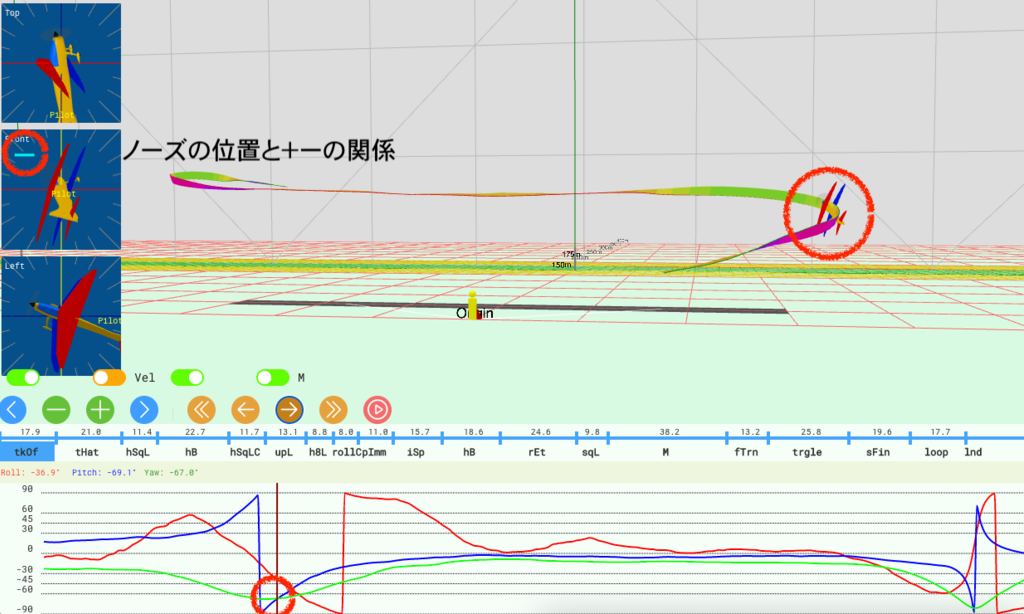
これは、ヘッドアップしている状態で旋回している為、Frontビューからすれば角度が変化して見えるということです。
ターン時のピッチグラフはヨーと組み合わせてこういう形になるので、これを覚えておくと、グラフの右端にも別のターンがあるのがすぐに分かる様になります。
姿勢の数値を元にして作られているのが、プロッター画面左側にある3つの小さな画面です。
一番上の「トップビュー」は機体を真上(ヨー軸)から見た姿で、グラフの「緑→ヨー」に関連しているので分かり易いと思います。
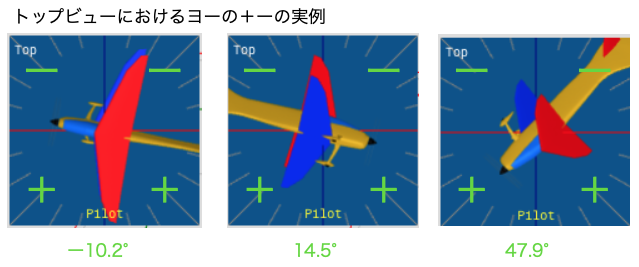
ただ、ヨーといっても、ここでは機体のラダーに関する話ではありません。
演技面に対して胴体がどちらを向いているかという話です。
ピッチやロールは関係ありません。
単純に、「翼の無い胴体がどちらを向いているか」と考えると分かり易くなります。
翼は関係ないので、正面も背面もナイフエッジもありません。
演技面に対するノーズの方向(位置)によって+ーが決められています。
その+ーは、実例を見ると、手前方向が+ 奥方向がーとなっているのが分かります。
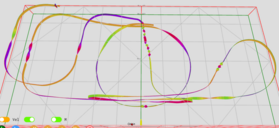
ネット上にあったFTさんのP23パターン。
了解を得てアップします。
(つづき)
2つのGPSアンテナを共に上向きで並べて配置したときの、GPSの測定精度を示す各パラメータは下記の通りとなりました。
【GPS Blending】
[Primary]
NSats: 0(min.)~19.91(average)~23(max.)
HDop: 0.54~0.64~99.99
[Secondary]
NSats: 12~19.87~23
HDop: 0.54~0.58~0.83
[Blended]
NSats: 13~20.50~23
HDop: 0.54~0.57~0.81
XKF4_SV: 0~0.24~3.63
XKF4_SP: 0~0.19~3.92
XKF4_SM: 0~0.25~0.57
2つのGPSアンテナを上向きと下向きに分けた場合と比較すると、今回の共に上向きで並べて配置した場合の方がGPSの測定精度は、一部のパラメータを除き明らかに良くなっています。
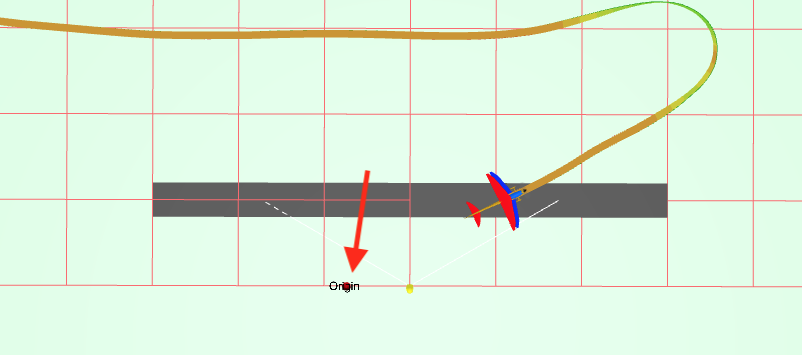
GPSアンテナを2つ用いたフライトについて、前回は2つのGPSアンテナを上向きと下向きに配置しましたが、今回は共に上向きで両者並べて配置しました。まず、前回と同様緯度データは下図のようになりました。
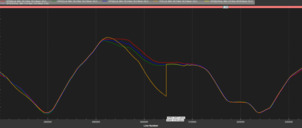
前回の、2つのGPSアンテナを上向きと下向きに分けた場合に比較して、今回はほとんどのデータがPrimary(赤)とSecondry(緑)及びBlended(青)で一致しており、POS(ベージュ)のデータも当然ながらそれらと一致しています。但し、一カ所Primary,Secondary及びBlendedの緯度データがばらついている箇所があります。この部分を拡大したのが下図です。
カルマンフィルターを通した最終的な出力であるPOSの値(Flight Coachで使用)もこれら3つの値から大きく異なっています。その後POSの値はステップ状に上昇し、3つの値に近づきます。何故POSの値がこのような変化をするのかは不明です。フライトパスにもこの症状がはっきりと現れています。下図で示すように、背面になった辺りから機体の姿勢が示す方向とフライトパスがずれ始め、最終的に赤矢印のところでステップ状に大きく変化して元のフライトパスに戻っています。
"GPS Blending"機能を用いた場合のPOSデータの変化の挙動については、今後更に詳細に検討する必要がありそうです。
さすが本場。使用してますね。
Dual GPSによるGPSエラー低減の試み(つづき)
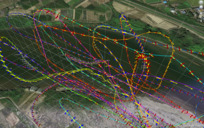

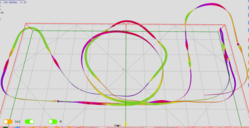
下の2つの図はLogファイルのPOSデータをGoogle Earth上に表示させたもので、各マヌーバを色分けして表示してあります。飛行機のアイコンはその位置における機体の姿勢を示しており、赤は機体の上面を、青は下面を表しています。フライトパス上の白い四角マークは補足されたGPS衛星の数が12未満(Ardupilotでは12以上を推奨)となる位置を表しており、最初の数値は衛星捕捉数NSatsを、次の数値はGPSによる水平方向の測定精度を示すHDop(Ardupilotでは2未満を推奨)を表しています。
上段の図は、GPSアンテナが1つの場合、下段の図はGPSアンテナが2つでGPS Blending機能を用いた場合を示しています。GPS Blending機能を用いた方が、エラーの起こる可能性を示す白い四角の数は少なく、エラーとなる確率が小さくなることが分かります。なお、NSatsが12未満となる回数は、GPSアンテナが1つの場合69回、2つの場合45回でした。また、GPSアンテナを2つ使用した下段の図で、NSatsの値が小さくなるのは垂直上昇の場合です。垂直上昇時は、Primary(上向き)及びSecondary(下向き) GPS共にカーボン製キャノピー並びにモーター周りのカーボン部材の直下にくるため、GPS衛星からの電波が遮断されるためと思われます。
オーストラリアでは2023年度の競技会が始まりますが、その練習風景との事です。
10:35には、フライトコーチも映っています。
サウジアラビア・リヤドの飛行場。

日本とはスケールが違い過ぎです。
Extreme Flight Extra 300 91" V1 Low and Slow 3D Flight
First Record of 2023 IMAC Unlimited 2023 Known
http://planes.be-steam.com/home
インメルマンターンでのバンピング
ミュゼットでのインメルマンターンです。
ピッチとロールのグラフを見ると、どんな操作をしているのかが分かってきます。
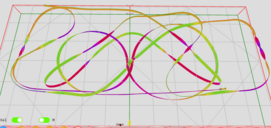
こちらはTUさんのP23パターン
GFTOさんのミュゼットでのP23
125mコースの大きな演技なので、滑らかさがあります。
The FCGeo Locatorが公開されました。
上記ページのFCGeo linkをクリックして新しいプロッターへ進み、自分で保存してあるフライトデータ(jsonファイル)を開きます。
controlキーとマウス操作で、視点を変えられます。
下のバーにある各演技名を2回クリックすると、全演技が表示されます。
ブログ特別仕様のFCで使った画像をこちらにもアップしておきます。
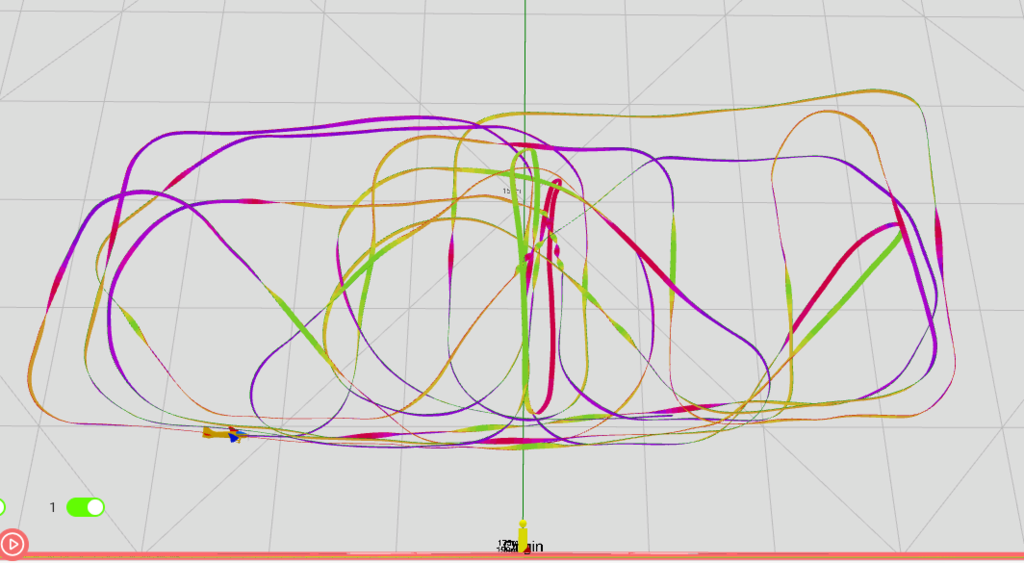
使用器材によってリボン図が大きく変わってしまう訳ではありませんが、機器の精度による微妙な差はあるかもしれません。
ヨーロッパの現在の登録飛行場。
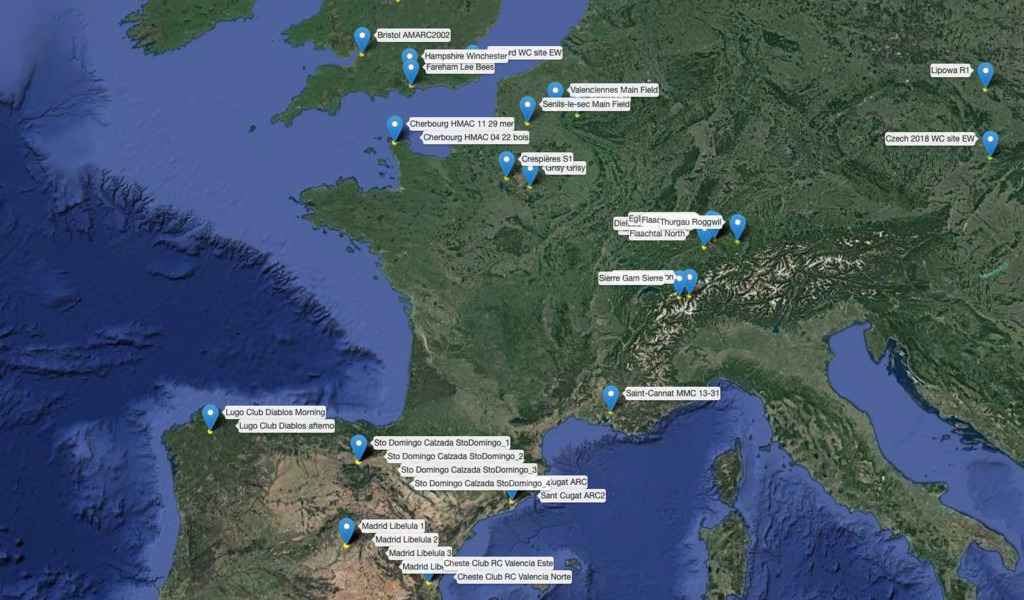
フランスも少ないですが、メインの場所は登録されてます。
オーストラリアとニュージーランド

2023年F3A世界選手権はオーストラリアのWarwick(ウォリック)で開催されます。
2023 WORLD CHAMPIONSHIPS
オーストラリアはフライトコーチ開発者のお膝元でもあるし、アメリカやイギリスなどもフライトコーチ利用が進んでいる様です。
当然、審査員もそれなりの経験者が入って来ることが予想されますが、どうなるでしょうか。
飛行場の登録はしていなくてもフライトコーチのプロッターは使えますが、登録しておいた方が何かと便利ですね。
120mの件は知らなかったのですが、エラー表示が少なくなる筈なので助かります。
自己流のところもあって、それが良いか悪いかは今ではフライトコーチで見えてしまうので、ヒント程度に考えていただければ幸いです。
曲がってから舵を打つのでは遅いので、曲がらない為にどうするかと考えて色々と取り組んでいるところです。
周りに教えて貰える人がいないので、どのようにすればいいのか手探り状態で飛ばしてます。
舵の打ち方、考え方等、技術的な書込はものすごく参考になります。
これからもよろしくお願いします。
お世話になります。
さいたま市の桜区で飛ばしてますが、昨年の暮にクラブの飛行場をフライトコーチに登録しました。
今日、Map確認のついでにFAQを見たら50mが120mになってるようなので、実際確認してみると
「・・・than 120m from the origin」というエラーになりました。
以前はoriginが50m以上離れていると「・・・than 50m from the origin」というエラーが出てたんですが、
50m問題が120mに改善されたんですね。
今年はもう少しフライトコーチを活用していきたいと思いますのでよろしくお願いします。
IMAC Unlimited 2023 Known
Originは電源投入をした位置ですが、プロッターでの表示が実際と違う事が良くあります。
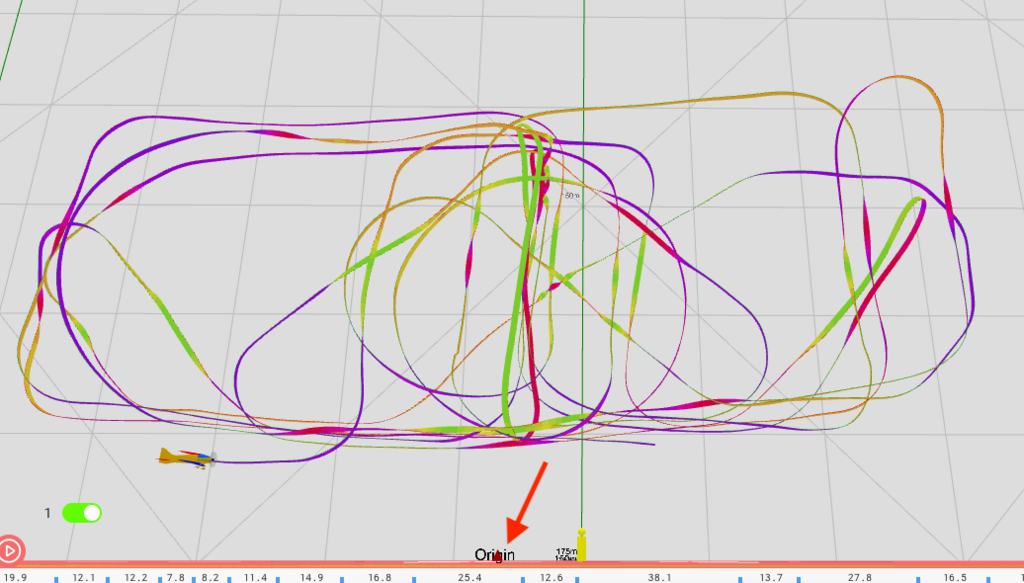
毎回違う場所で電源ONしたのではこの事に気付き難いので、私はパイロット位置近くで電源ONをする様にしているのです。
今日のフライトでもこんな事がありました。
パイロット近くで電源ONにしたのに、Originが20m近くズレています。
こんな時はプロッターのSettingsから座標の修正を行う事ができます。
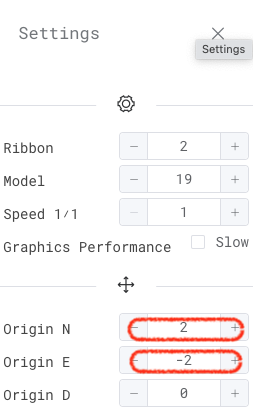
その結果がこちら。
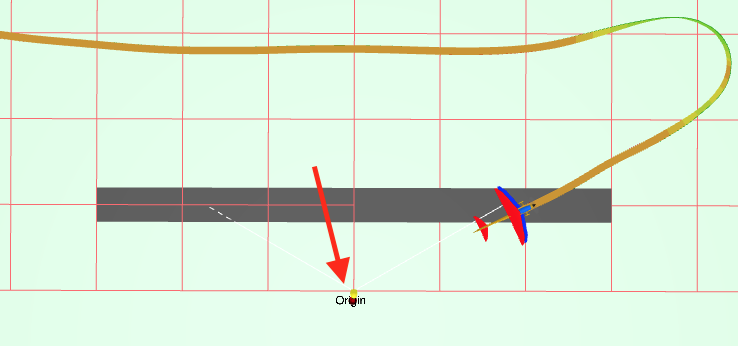
多かれ少なかれズレは発生しているので、毎回気を付けていた方が良いでしょう。
早々と知らせていただいてありがとうございます。
トピックのトップに加えておきました。
このBBSも取り上げられていましたね。
I’ve been involved in pattern for quite a while and this is the most powerful tool ever! BE WARNED, your flying is not as good as you think!
「あなたのフライトはあなたが思っているほど良く無い」
まさにその通りで、初めて自分のリボン図を見た時は驚きました。
https://www.ckaero.net/blogs/articles/an-introduction-to-flight-coach-for-f3a-pattern-a-new-and-brutally-honest-coach
フライトコーチの紹介記事がありました
このスレッドで大丈夫でしょうか
フライトコーチ/タイプ2の製品供給については、このトピック15と24に書きましたが、その後追加した物も売り切れとなってしまいました。
今後の入手方法としては、リンク集にあるような海外製品を、各自それぞれが直接注文というかたちになってしまうと思われます。
動画の説明欄に書いた事ですが、書き加えた事もあるので、こちらにも載せておきます。
ーーーーーーーーーーーーーー
フライトコーチの魅力の1つは、飛行中の機体を色々な角度から見られる事です。
ロールの軸を通すのは本当に難しい事ですが、今回はP-23の中でのロールに的を絞って見てみましょう。
このフライトのjsonファイルはこちらにアップしてあります。
P23_2245.json
https://1drv.ms/u/s!Au8FOaiacU40giRzbt5q56tJmdwf?e=1NhuT7
動画では、0:56にロール直前のバンピングや、
スピンのエントリー1:03では、サージングと呼んで良いのか、ドライビングテクニックのソーイングの様なエレベーター操作も見られます。
また、後からこの瞬間をスロー再生してみると、右ロール方向に失速しかかっているのも分かり、(もちろんこんな事は地上からは見えないのですが)、飛行機の動きを知る良い資料にもなります。
操縦に関連のあるブログ記事
バンピング
https://denkado1.jimdofree.com/2020/11/23/バンピング/
操縦テクニック
https://denkado1.jimdofree.com/2020/12/28/操縦テクニック/
前出の動画にもありますが、「ロールの軸を通すのはとっても難しい」事です。
実際にどんな感じでロールが行われているのか、動画にまとめてみました。
素晴らしいです。
アップありがとうございます。
綺麗なラインですね。
とある日、とある人のP-23です
と、F-23です
0:44の姿勢の見極め方についてですが、
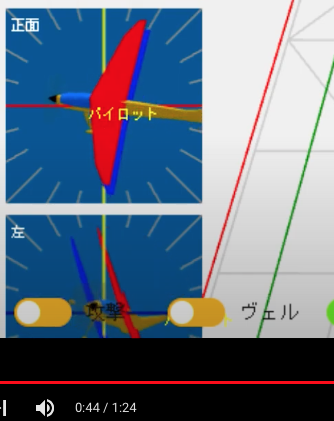
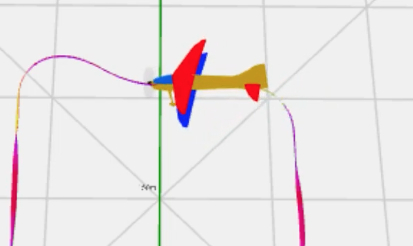
プロッタ画面左にある拡大画像と、パイロット位置から見た機影には、違いがある事に気を付けなければなりません。
パイロットの目には、かなり奥へ倒れている感じになります。
なお当然の事ながら、ロールの当て舵は単純にラダーを当てれば良いという様なものでは無く、この場合なら、
背面直線→ポンとダウンを打って機首上げと同時にロール開始→ナイフエッジ付近での右ラダー→180°ロール終了間際にアップ→正面飛行
といった操作が必要になる訳です。
「そんな事分かっている」と思われるかもしれませんが、
舵をどこで入れて、どこで抜くか、そしてその量は、といった事は、演技フライトには最も大切な所でもあります。
エルロン・ロールについて、動画を参考にじっくり考えてみてください。
11:12辺り、「とっても難しい」
実感がこもっています。
上辺でのロールについて、練習方法を考えてみました。
「右ロールの場合」0:44で右ラダーをポンと短く打つのがコツです。
練習方法としてはまず、0:44の姿勢を左側の拡大画面も参考にしながら覚えましょう。
0:43ではありません。
翼端がやや右上を向いている0:44です。
この姿勢を覚えたら、動画を再生してここと思う所でストップしてみます。
0:44で止められましたか。
この練習を何十回と繰り返してタイミングを自分のものにするのです。
再生スピードを色々と変えてみる必要もあります。
動画でタイミングが掴める様になってから、実際にフライトしてみます。
ロール中のここぞと思うところで「右ラダーをポン」です。
右と思っても指が左へ動いてしまうのかもしれませんが、そこは練習するしかありません。
最終的には打つ量や長さが問題になりますが、最初はまずラダーのタイミングと方向を間違えない様にする事が大切です。
打ちっぱなしではダメなので、最初はとにかく思い切ってポンとパルス状に右ラダーを打ってみましょう。
コメントで、フライトの怪しいところに触れておきました。
本当にそうなのか。
それができるのか。
試してみてください。
https://youtu.be/LpWlMwlQJeY
221217のフライトです。