お世話になります。
さいたま市の桜区で飛ばしてますが、昨年の暮にクラブの飛行場をフライトコーチに登録しました。
今日、Map確認のついでにFAQを見たら50mが120mになってるようなので、実際確認してみると
「・・・than 120m from the origin」というエラーになりました。
以前はoriginが50m以上離れていると「・・・than 50m from the origin」というエラーが出てたんですが、
50m問題が120mに改善されたんですね。
このBBSも取り上げられていましたね。
I’ve been involved in pattern for quite a while and this is the most powerful tool ever! BE WARNED, your flying is not as good as you think!
「あなたのフライトはあなたが思っているほど良く無い」
まさにその通りで、初めて自分のリボン図を見た時は驚きました。

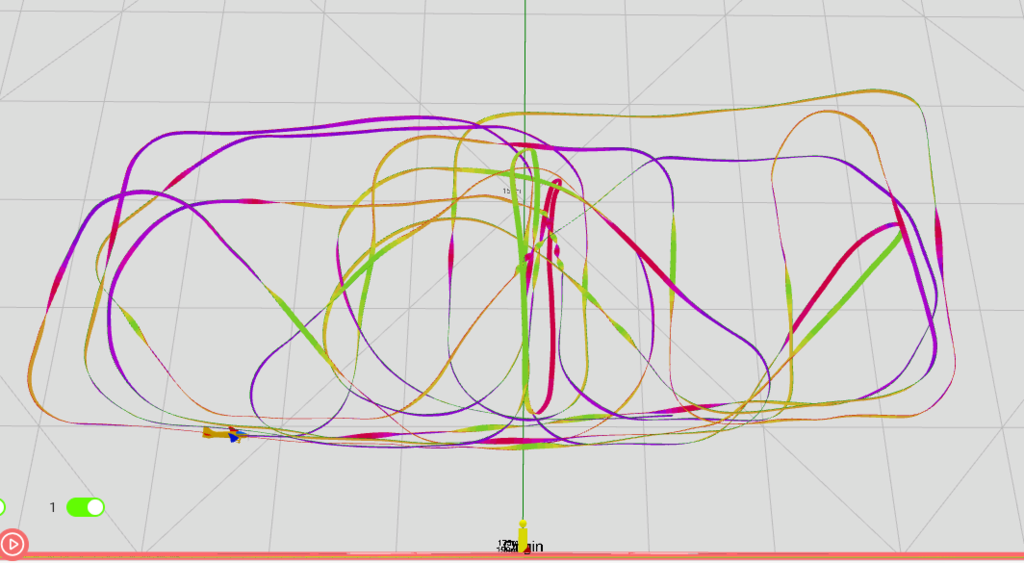
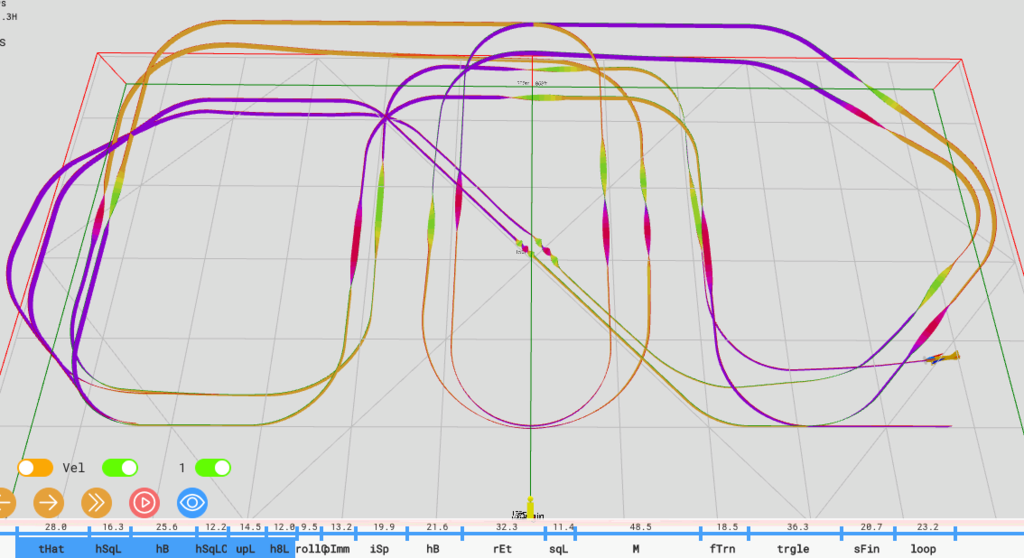
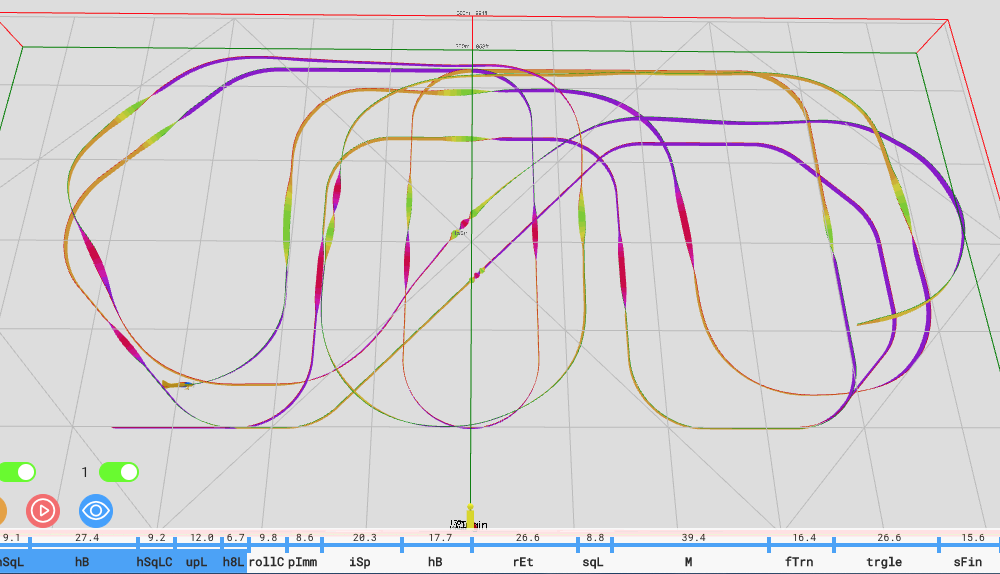
The FCGeo Locatorが公開されました。
上記ページのFCGeo linkをクリックして新しいプロッターへ進み、自分で保存してあるフライトデータ(jsonファイル)を開きます。
controlキーとマウス操作で、視点を変えられます。
下のバーにある各演技名を2回クリックすると、全演技が表示されます。
ブログ特別仕様のFCで使った画像をこちらにもアップしておきます。
使用器材によってリボン図が大きく変わってしまう訳ではありませんが、機器の精度による微妙な差はあるかもしれません。
ヨーロッパの現在の登録飛行場。
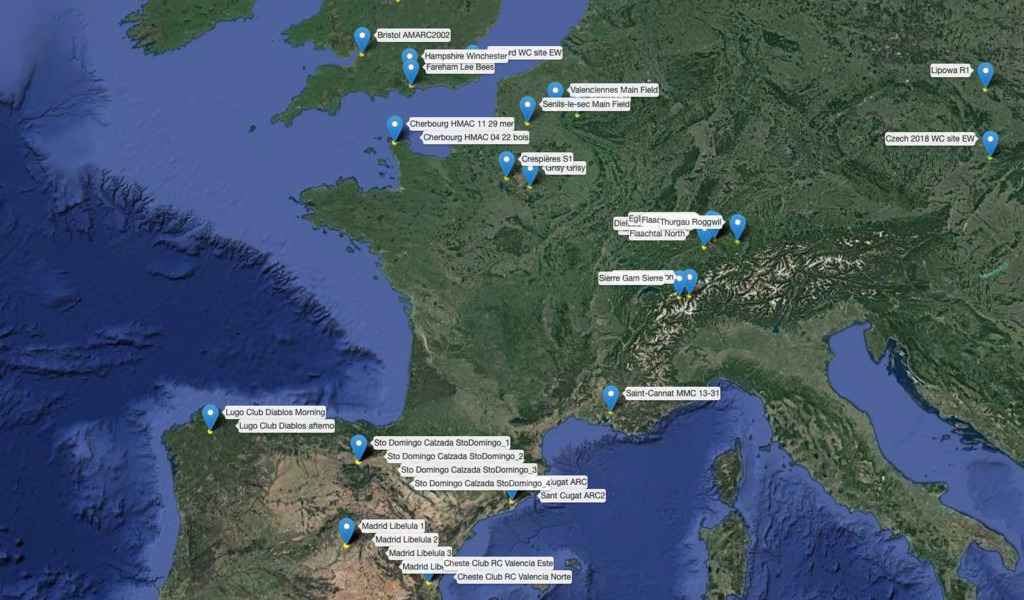
フランスも少ないですが、メインの場所は登録されてます。
オーストラリアとニュージーランド

2023年F3A世界選手権はオーストラリアのWarwick(ウォリック)で開催されます。
2023 WORLD CHAMPIONSHIPS
オーストラリアはフライトコーチ開発者のお膝元でもあるし、アメリカやイギリスなどもフライトコーチ利用が進んでいる様です。
当然、審査員もそれなりの経験者が入って来ることが予想されますが、どうなるでしょうか。
飛行場の登録はしていなくてもフライトコーチのプロッターは使えますが、登録しておいた方が何かと便利ですね。
120mの件は知らなかったのですが、エラー表示が少なくなる筈なので助かります。
自己流のところもあって、それが良いか悪いかは今ではフライトコーチで見えてしまうので、ヒント程度に考えていただければ幸いです。
曲がってから舵を打つのでは遅いので、曲がらない為にどうするかと考えて色々と取り組んでいるところです。
周りに教えて貰える人がいないので、どのようにすればいいのか手探り状態で飛ばしてます。
舵の打ち方、考え方等、技術的な書込はものすごく参考になります。
これからもよろしくお願いします。
お世話になります。
さいたま市の桜区で飛ばしてますが、昨年の暮にクラブの飛行場をフライトコーチに登録しました。
今日、Map確認のついでにFAQを見たら50mが120mになってるようなので、実際確認してみると
「・・・than 120m from the origin」というエラーになりました。
以前はoriginが50m以上離れていると「・・・than 50m from the origin」というエラーが出てたんですが、
50m問題が120mに改善されたんですね。
今年はもう少しフライトコーチを活用していきたいと思いますのでよろしくお願いします。
IMAC Unlimited 2023 Known
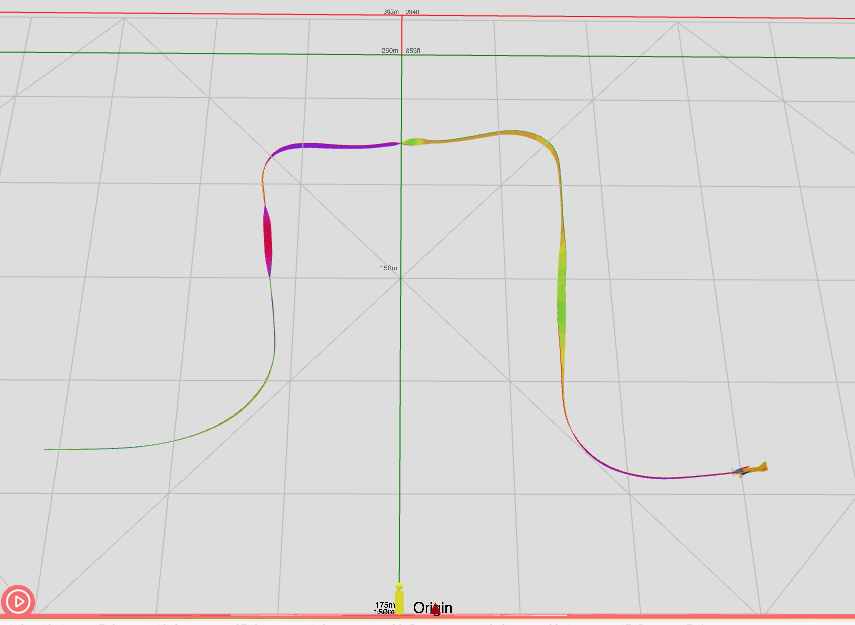
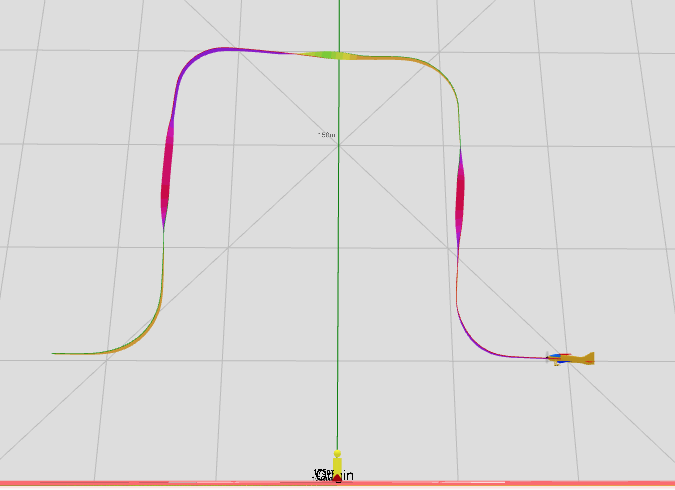
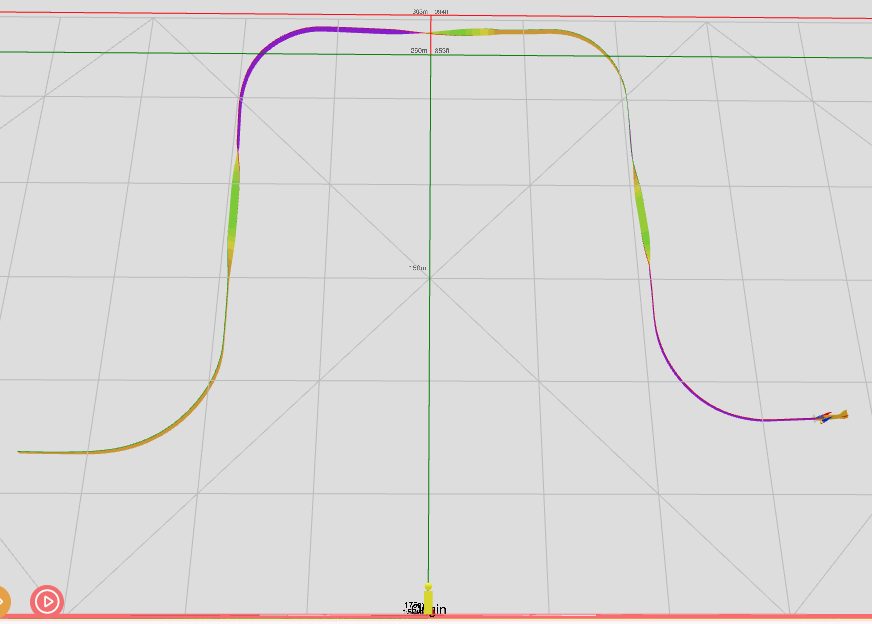
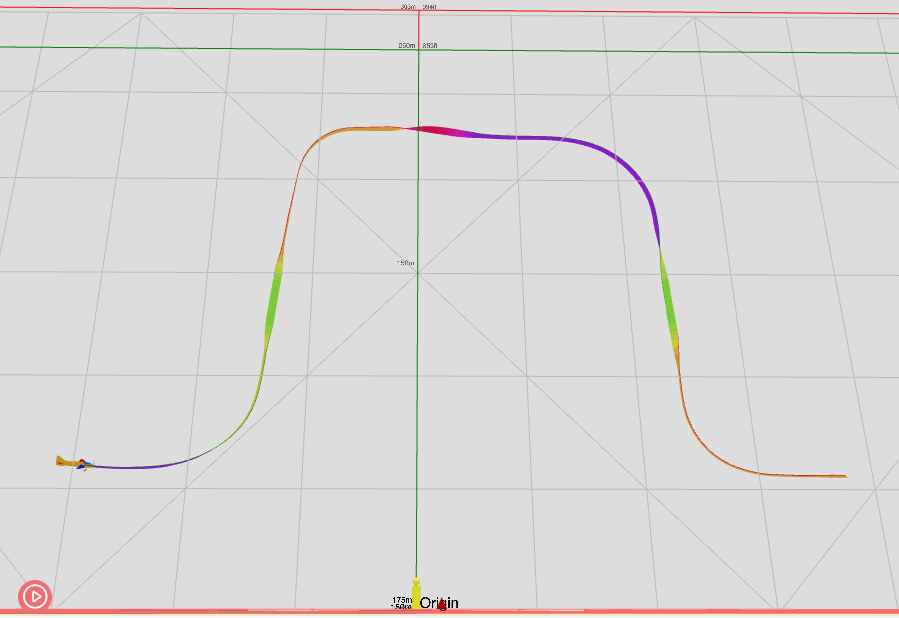
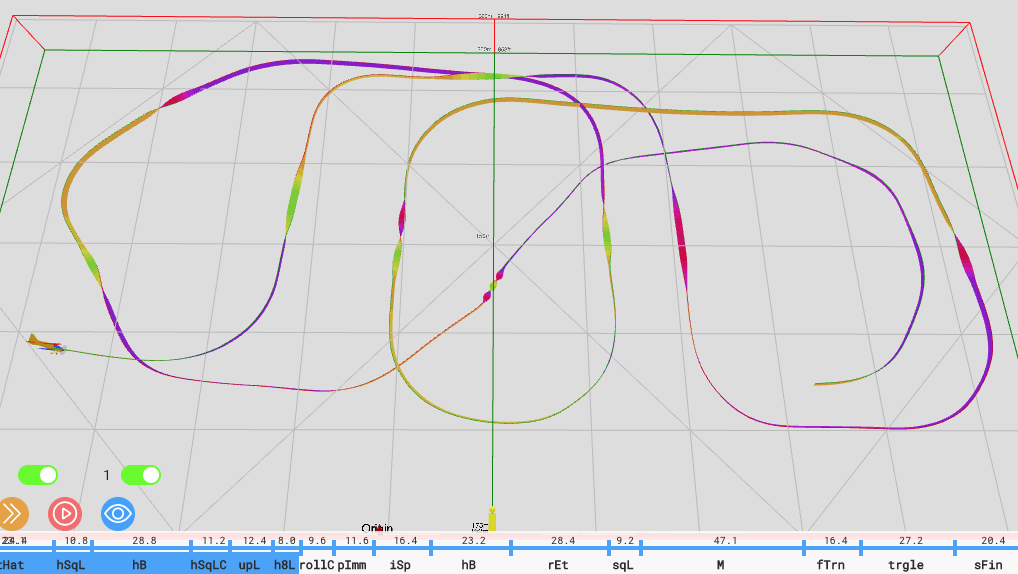
Originは電源投入をした位置ですが、プロッターでの表示が実際と違う事が良くあります。
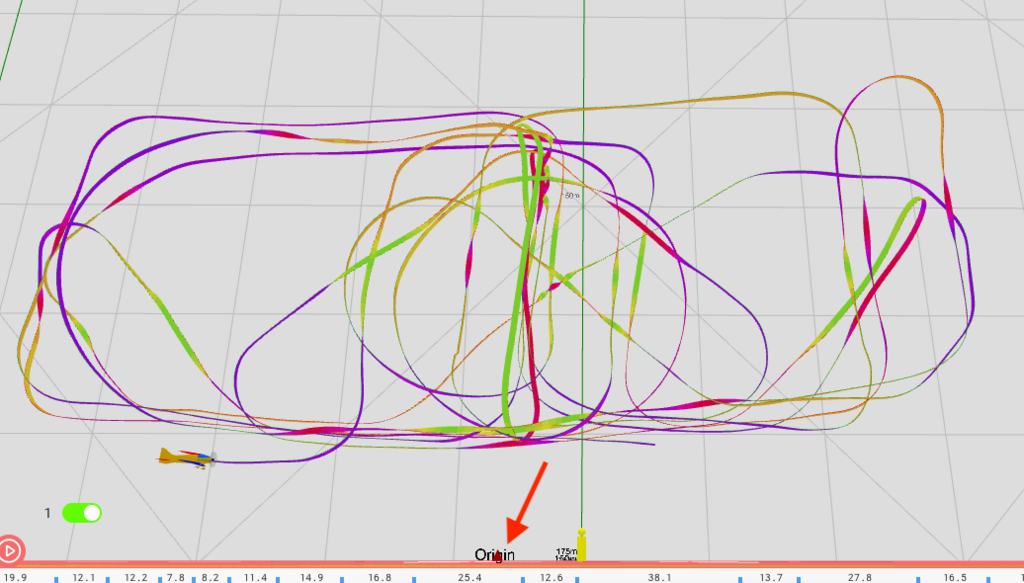
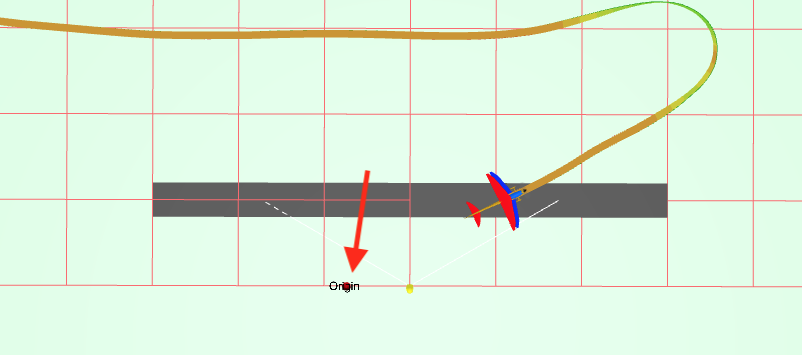
毎回違う場所で電源ONしたのではこの事に気付き難いので、私はパイロット位置近くで電源ONをする様にしているのです。
今日のフライトでもこんな事がありました。
パイロット近くで電源ONにしたのに、Originが20m近くズレています。
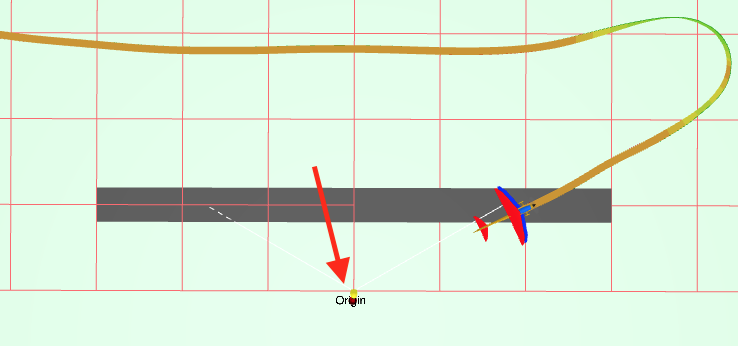
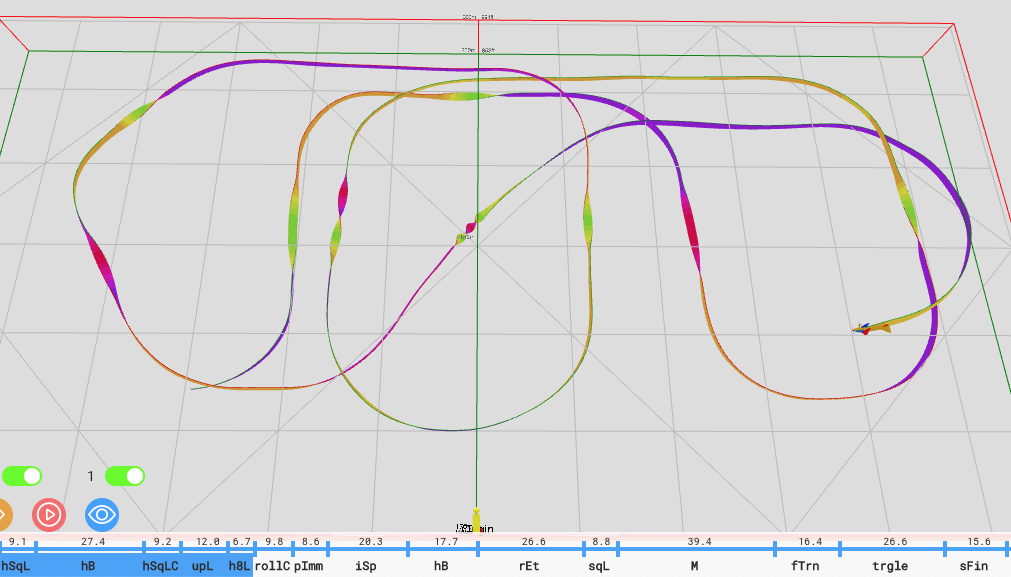
こんな時はプロッターのSettingsから座標の修正を行う事ができます。
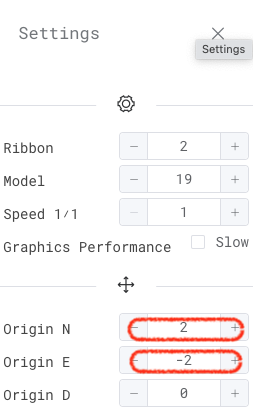
その結果がこちら。
多かれ少なかれズレは発生しているので、毎回気を付けていた方が良いでしょう。
早々と知らせていただいてありがとうございます。
トピックのトップに加えておきました。
このBBSも取り上げられていましたね。
I’ve been involved in pattern for quite a while and this is the most powerful tool ever! BE WARNED, your flying is not as good as you think!
「あなたのフライトはあなたが思っているほど良く無い」
まさにその通りで、初めて自分のリボン図を見た時は驚きました。
https://www.ckaero.net/blogs/articles/an-introduction-to-flight-coach-for-f3a-pattern-a-new-and-brutally-honest-coach
フライトコーチの紹介記事がありました
このスレッドで大丈夫でしょうか
フライトコーチ/タイプ2の製品供給については、このトピック15と24に書きましたが、その後追加した物も売り切れとなってしまいました。
今後の入手方法としては、リンク集にあるような海外製品を、各自それぞれが直接注文というかたちになってしまうと思われます。
動画の説明欄に書いた事ですが、書き加えた事もあるので、こちらにも載せておきます。
ーーーーーーーーーーーーーー
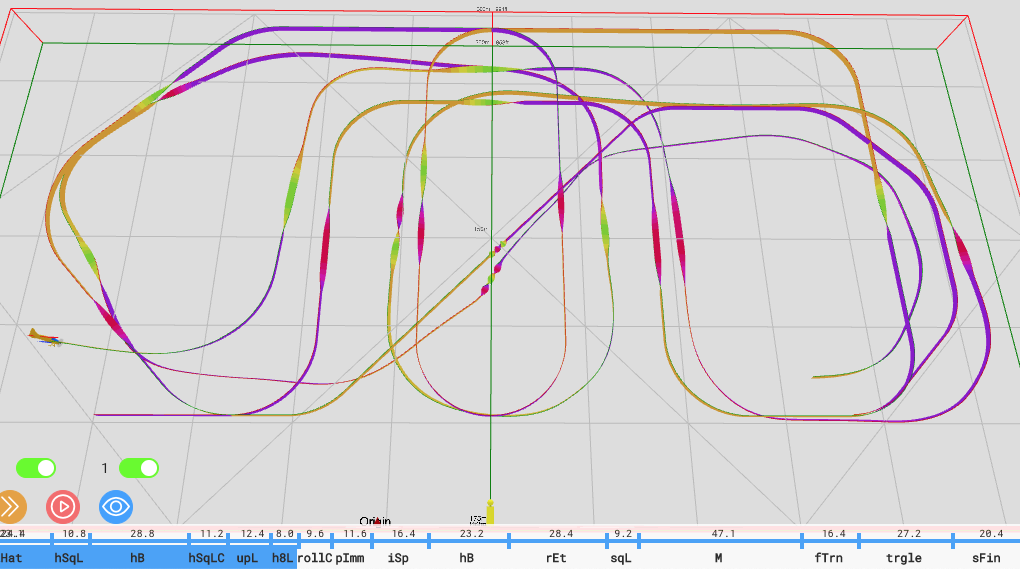
フライトコーチの魅力の1つは、飛行中の機体を色々な角度から見られる事です。
ロールの軸を通すのは本当に難しい事ですが、今回はP-23の中でのロールに的を絞って見てみましょう。
このフライトのjsonファイルはこちらにアップしてあります。
P23_2245.json
https://1drv.ms/u/s!Au8FOaiacU40giRzbt5q56tJmdwf?e=1NhuT7
動画では、0:56にロール直前のバンピングや、
スピンのエントリー1:03では、サージングと呼んで良いのか、ドライビングテクニックのソーイングの様なエレベーター操作も見られます。
また、後からこの瞬間をスロー再生してみると、右ロール方向に失速しかかっているのも分かり、(もちろんこんな事は地上からは見えないのですが)、飛行機の動きを知る良い資料にもなります。
操縦に関連のあるブログ記事
バンピング
https://denkado1.jimdofree.com/2020/11/23/バンピング/
操縦テクニック
https://denkado1.jimdofree.com/2020/12/28/操縦テクニック/
前出の動画にもありますが、「ロールの軸を通すのはとっても難しい」事です。
実際にどんな感じでロールが行われているのか、動画にまとめてみました。
素晴らしいです。
アップありがとうございます。
綺麗なラインですね。
とある日、とある人のP-23です
と、F-23です
0:44の姿勢の見極め方についてですが、
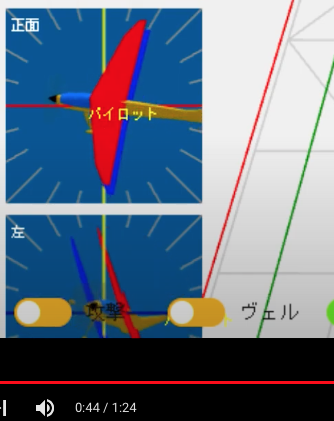
プロッタ画面左にある拡大画像と、パイロット位置から見た機影には、違いがある事に気を付けなければなりません。
パイロットの目には、かなり奥へ倒れている感じになります。
なお当然の事ながら、ロールの当て舵は単純にラダーを当てれば良いという様なものでは無く、この場合なら、
背面直線→ポンとダウンを打って機首上げと同時にロール開始→ナイフエッジ付近での右ラダー→180°ロール終了間際にアップ→正面飛行
といった操作が必要になる訳です。
「そんな事分かっている」と思われるかもしれませんが、
舵をどこで入れて、どこで抜くか、そしてその量は、といった事は、演技フライトには最も大切な所でもあります。
エルロン・ロールについて、動画を参考にじっくり考えてみてください。
11:12辺り、「とっても難しい」
実感がこもっています。
上辺でのロールについて、練習方法を考えてみました。
「右ロールの場合」0:44で右ラダーをポンと短く打つのがコツです。
練習方法としてはまず、0:44の姿勢を左側の拡大画面も参考にしながら覚えましょう。
0:43ではありません。
翼端がやや右上を向いている0:44です。
この姿勢を覚えたら、動画を再生してここと思う所でストップしてみます。
0:44で止められましたか。
この練習を何十回と繰り返してタイミングを自分のものにするのです。
再生スピードを色々と変えてみる必要もあります。
動画でタイミングが掴める様になってから、実際にフライトしてみます。
ロール中のここぞと思うところで「右ラダーをポン」です。
右と思っても指が左へ動いてしまうのかもしれませんが、そこは練習するしかありません。
最終的には打つ量や長さが問題になりますが、最初はまずラダーのタイミングと方向を間違えない様にする事が大切です。
打ちっぱなしではダメなので、最初はとにかく思い切ってポンとパルス状に右ラダーを打ってみましょう。
コメントで、フライトの怪しいところに触れておきました。
本当にそうなのか。
それができるのか。
試してみてください。
https://youtu.be/LpWlMwlQJeY
221217のフライトです。
4例目
パートループ、直線、ロールなど、それらがどれだけ正確にフライト出来ているか、何度も見直してみます。
例えば、このフライトだと、
ロール前後の直線はありますか? その長さは等しいですか?
上辺のロールでエレベーターの使い方は? ダウンのままではありませんか?
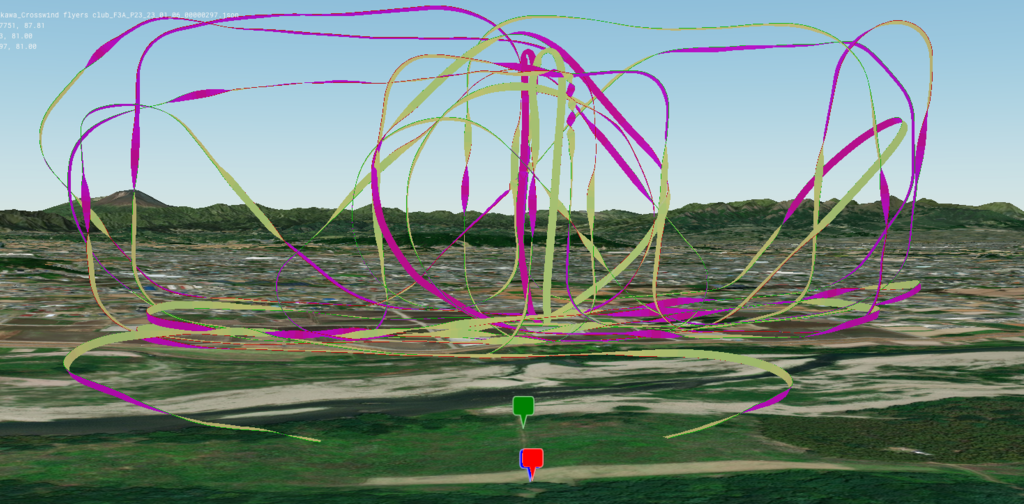
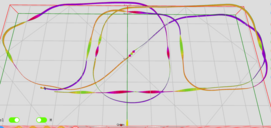
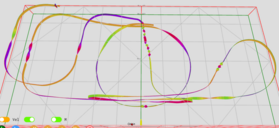
Gernot BruckmannさんのP-23パターン
セシウム3Dマップの上にリボンの静止画を表示したところだそうです。

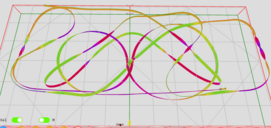
3例目
ラインとRの描き方以外にも機体の細かな動きが手に取る様に分かって、怖いくらいですね。
実際のフライトでは、この様な微妙な動きが100~200m離れた所で行われているのです。
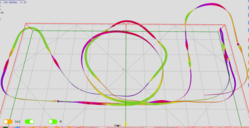
2例目
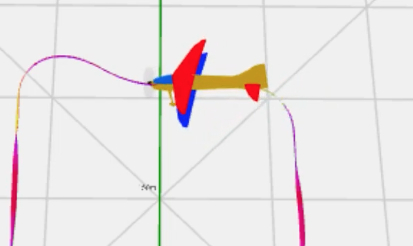
フロントビューの拡大画面で、機体の動きを確認してみます。
この時注意しなければならないのは、風への対処です。
無風時なら問題無いですが、風がある時は機軸をズラして飛ぶ必要があるので、機軸が曲がっている方が正解の場合もあります。
風速はスピンの落下具合で判断しておく必要があります。
これは実機ならではのものかもしれませんが、ピッチ方向の「けじめ」をしっかりつけている様子が良く分かる動画です。
直線とRの接点を境に、一瞬で画像がピッチ方向に流れ始め、また静止しています。
例えば0:43〜辺り
採点表も公開されています。
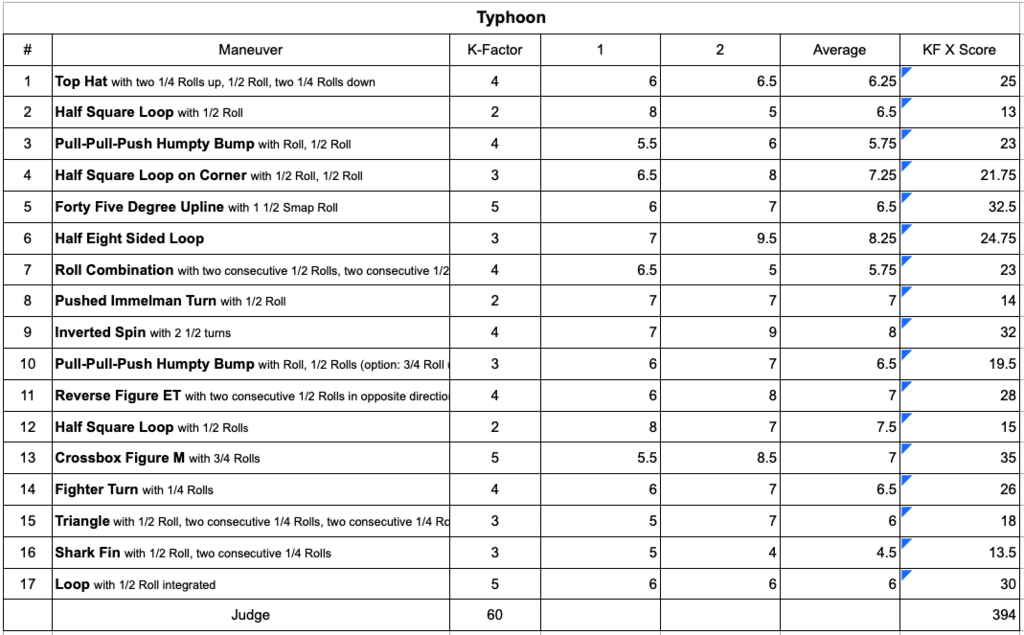
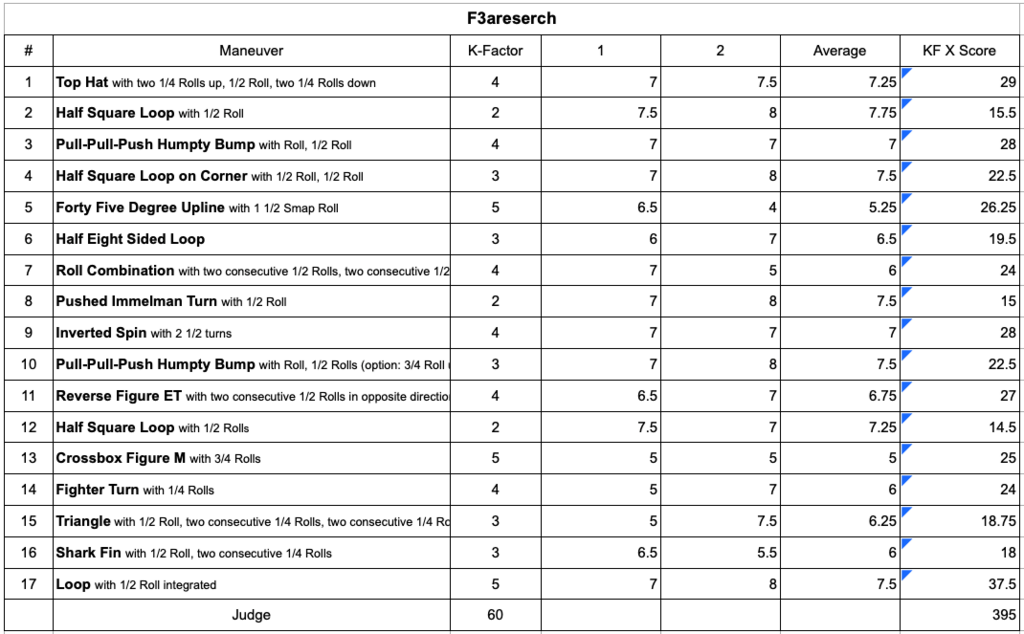
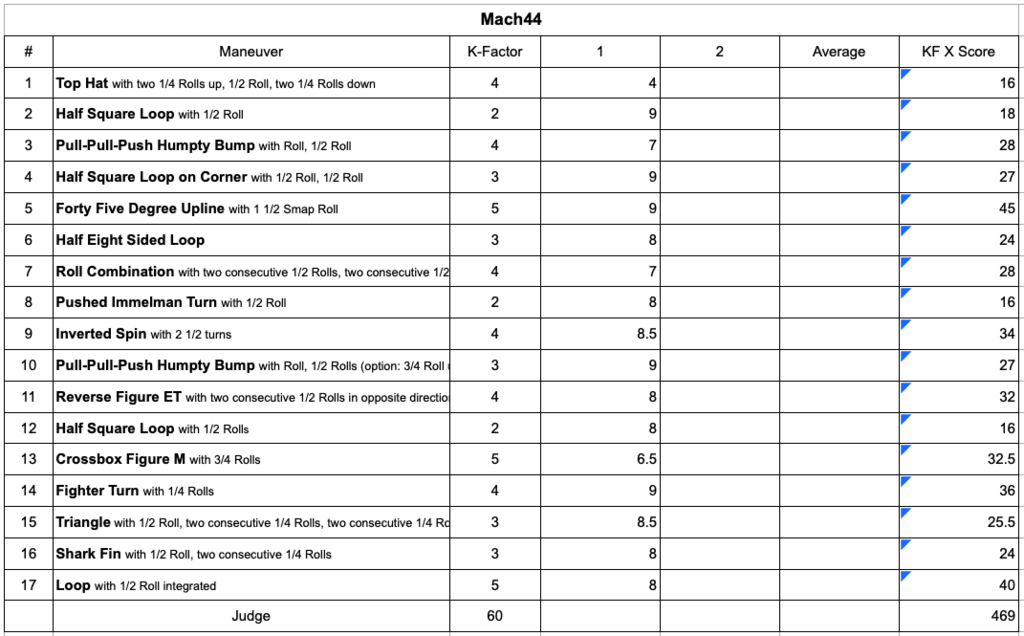
参加者はお互いに採点し合う事になっているので、採点のやり方も勉強しておかなければなりません。
実際に肉眼で見るのと画面で見るのは勝手が違うので、慣れが必要です。
まぁ、将来は機械による自動判定となるのでしょうが、ただ飛ばす練習だけでなく、ジャッジの立場に立って演技を見るというのも、パターンフライトを知る上では大事な事です。
どんな所をどれくらい減点するかは個人の判断によるし、少数意見の方が正しい事もあるので多数決で決めればいいというものでもありません。
どこで減点して良いか分からなければ全員が高得点になってしまうし、逆に減点ばかりしていたら点数はなくなってしまいます。
公平性とバランス感覚が大切で、採点作業は本当に難しいです。
因みに、私がやってみたら、TyphoonさんとF3areserchさんは似た様な点数となり、Mach44さんはもっと高得点となりました。
F3A競技会に小型機で参加する事も出来ない事は無いですが、大人の中に子供が混じって競争している様な違和感はあるので、参加は考えていませんでした。
審査する側になったとしても、スケール感に慣れていないと、プロッターの設定などで戸惑ってしまうと思うので。
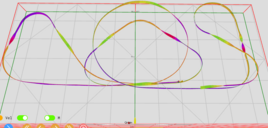
例えばミュゼットならこんな感じになります。
ちなみに、今回の参加者ではありませんが、以前紹介したTDさんのフライトデータでは、こんな感じになります。
それぞれ全く別の環境でフライトしている訳ですが、それがこうして一目で見られるのですから、良い時代になったものです。
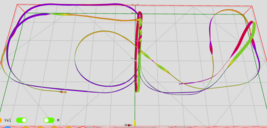
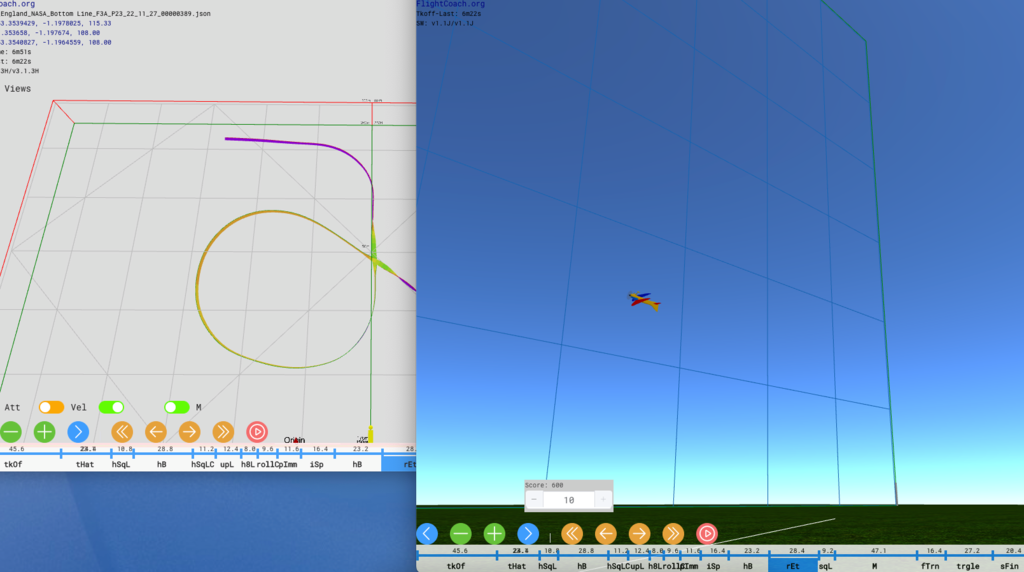
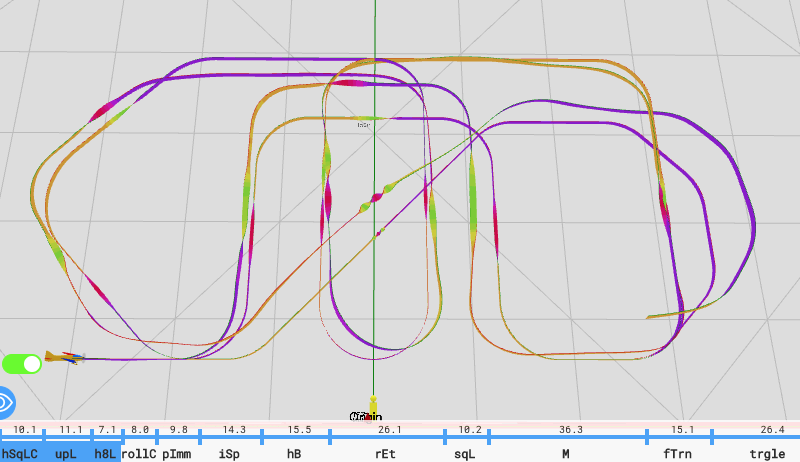
参加機のフライトを紹介しておきます。
テンプレートと比べてみましょう。
面白くなって来ましたね。
参加してくれた人に感謝です。
参加者は、フライトデータの提出だけでなく、ジャッジもしなければならないので、大変です。
素晴らしいです。海外のパイロットの航跡が自分のところでみられるとは。
3名の参加があって、その結果が発表されました。
https://github.com/protoncontrolsystems/onlinef3a22winter
選手のjsonを選択してからDownloadボタンを押すと、ブラウザでファイルが開きます。
そこで「ページを別名で保存」すると、jsonファイルとして自分のPCに保存できます。
後は通常通りプロッタで開くとリボン図が見られます。
色々なフライトを見るのも、とても参考になります。
リボン図を見られる様になった事で一区切りとし、その先へ進まれない方が意外に多い様なので、是非次のステップへ進んでみてください。
ブログの方にも書きましたが、やり方はフライトコーチの始め方 / 34にあります。
Denkadoさん、Moonさん
アドバイスありがとうございます。
月に1回程度の飛行なので、だいぶ返信が遅れてしまい申し訳ございません。
最新の結果としては、だいぶ改善されました。
飛行前に早めに電源を入れ、車などから離して待機していたところ、ジャンプの事象が発生しませんでした。
やはり、その時のコンディションに左右されるのですね。
プロッターで見ると楽しいですね。自宅に帰ってからの楽しみです。
勉強がてら、Moonさんの言われるログもチェックしてみたいと思います。
引き続きよろしくお願いいたします。
こういった物を有効活用して、公平なジャッジが実現できれば理想ですね。
スキル向上にもつながるでしょう。
どなたかの意見で見たのですが、ジャッジ 5割 + フライトコーチ 5割 などで採点してもいいかと思います。
フライトコーチが無い時は、地域や人によってそれぞれの思いでパターンを描いていました。
例えば45度ラインなどです。
それが、フライトコーチで見れば一発で分かります。
世界中どこにいても共通の認識を持てるという事が素晴らしい事なのです。
時代が変わりつつ有るのですね。先が楽しみです。
そうなんです。
日本の方が正確さを求めていると思っていたのですが、現状は逆で、海外の方がフライトコーチの必要性を感じている事が分かります。
これまでの様なやり方が変わりつつあることを理解していないと、何年か先には大きな差となってしまうでしょう。