練習場が載っていました。 https://f3a.com.au/2023wch/practise-sites/
飛行場のMapはこちら https://goo.gl/maps/JeF2CeBUXBWXfs6h9
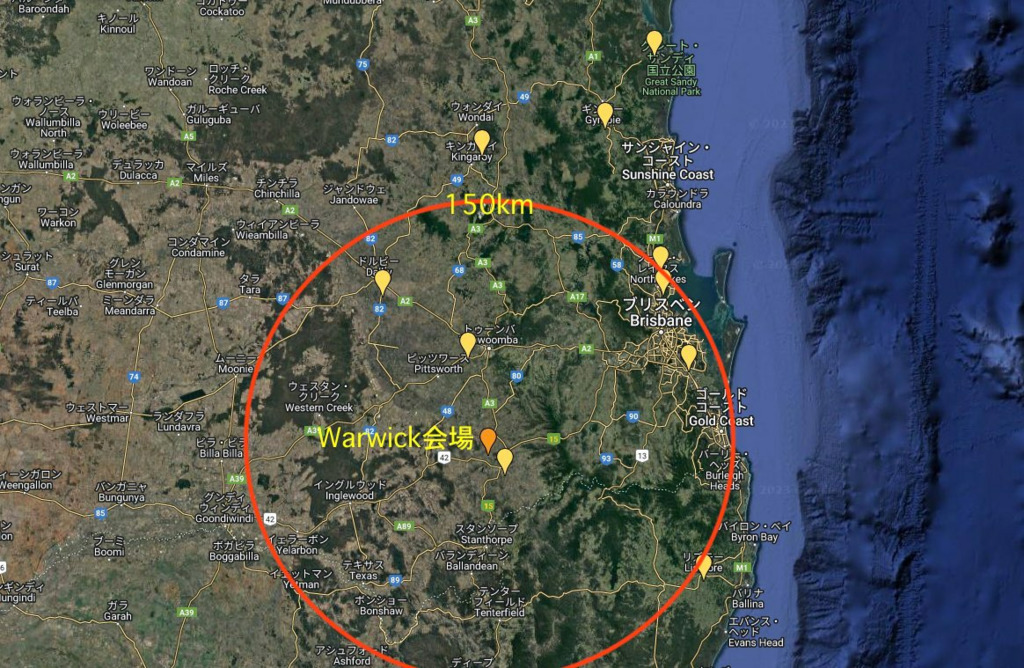
距離感が良く分かりませんが、会場から150kmだとこれくらいです。
仮登録申込締め切りは8月12日だそうです。
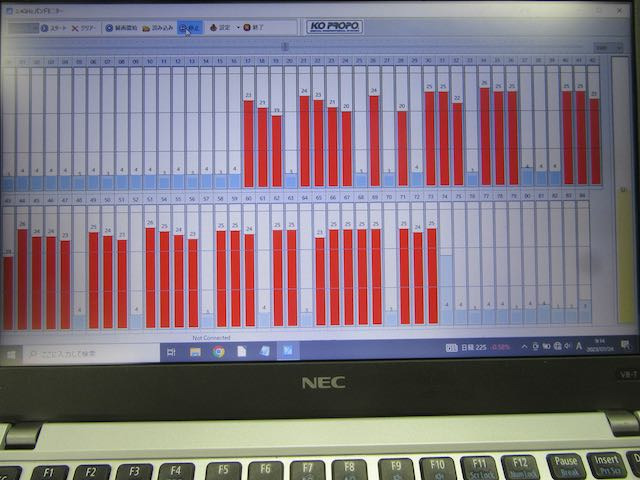
今日の様子。 地上のモニターでこれだけ受信できるということは、上空ではもっと酷い状態になっている事が考えられます。 地域によって違いがあると思うので、是非、各地の状況を知らせていただけると有り難いです。 「何も出ていないよ」という情報でも結構です。
今日のバンドモニターの様子。 ノイズの頻度は少なめでしたが、その中で一番強いのはこんな感じでした。 一瞬だけなので、フライトしていて感じることはありません。 もし、他の地域でのこの様な画像あれば、アップしていただけると有り難いです。
現地では着々と準備が進んでいます。 競技会を開催するのは大変な事です。
F3Aパターン競技で大切な事は、ルールに則っているかどうかになります。 格好良く飛べば良いというものではありません。
パターンフライトの資料 審査員のためのヒント ・採点は減点方式となっています。 ・後からスコアを考えるのは印象判断です。 ・競技中は他の審査員のスコアを無視します。スコアについて会話しないでください。個々の価値で各操縦を採点します。
製品の紹介ありがとうございます。 色々試してみたのですね。
https://morris-hobby.securesite.jp/7_1881.html
モーリスホビーさんでS WAVEというフタバ送信機対応の920Mhzバックアップシステムを売っています。
これの良いところは20フライト位のログデータがスマホですぐに見れるところです。
このログデータを見ると沢山出ているフタバの電波形式でどれが良いかはっきり解ります。
昨年色々試した結果S-FHSSが1番良かったですが、フタバ純正の受信機は危険で使えません。
今のところコロナの受信機が調子が良く墜落が一度も桑都ではありません。
サンプル数は少ないので参考までに。
今日の電波状況です。
個人でできる事としては、今のところそれしか考えられないという事ですね。 対応する製品が限られているこのままだと、RC人口は益々少なくなってしまうでしょうね。
TM-18を使用するためF社の送受信機ともに購入しました。 色々調べてもこれしかないのが現状です。 残り少ない(?)ラジコン人生、安全のためと割り切りました。
ところで前回、 クロスの飛行場から4Kmの所に携帯基地局があるとお伝えしました。 真偽は不明ですが、WiMAX+2は2.5GHz帯を使用しているとの情報もあります。 その電波が飛行場での電波モニターで一瞬モニタされる異常信号なのか また、R/Cの2.4GHz帯に干渉するかは不明です。
私が聞いている身近なノーコン情報では、 桑都:約6Km程度の所に同じ携帯基地局があるようです。 熊谷:約4Km程度の所に同じ携帯基地局があるようです。
偶然の一致かもしれません。 携帯基地局マップで検索すると判ります。
Facebookメンバーのみ視聴可能。 フライトコーチがやって来た サンプル画面
先に紹介した2.4GHz帯ドローン無線運用の落とし穴にもある様に、2.4GHzが「電波のごみ箱」状態になってしまうなら920MHzの利用もRC界の流れだという事ですね。 ただ実際のところRCフライヤーとしては製品が無ければどうしようもありません。 現在手に入るといったら、これだけでしょうか? TM-18
Team Informationのニュージーランドを見ると、Official Helperに見慣れた顔があります。 フライトコーチのMapでフランスの大会の事を紹介しましたが、今回の世界選手権は実力者が揃っていて、決勝に残るだけでも大変な事だと思います。
フランスのMACAP飛行場。 2面ありますが、一方は道路の上です。
7月13日〜16日に、この場所でフランス国内のF3A選手権が行われ、Stephane Carrier選手がCPLR選手を抑えて優勝しました。 https://voltige.sport.ffam.asso.fr/championnat-de-france-f3a-2023-aix-en-provence-macap/
Stephane Carrier選手は世界選手権のフランス代表にもなっています。 https://f3a.com.au/2023wch/team-information/
モーリスホビーさんから聞いた話ですが、業務に使用しているドローンは都心等では2.4GHzは使いものにならないので殆ど920Mhzで運用しているそうです。
ラジコン飛行機も920MHzをメインにして2.4Ghzはバックアップ程度に使うようになるかもしれませんね。
2.4GHzモニターの画像を紹介しておきましょう。 当然赤いグラフが受信した電波を表しています。 実際の画面は1秒毎に更新され、直前のデータが薄青で残っています。
RCプロポの例 薄青のグラフが色々なCHに見えます。
ドローンの例 凄い使用量ですね。 複数台あったら空きCHが無くなってしまいます。
2.4GHzは直進性が強いので、RCプロポの様な弱い電波は地上では遠くまで届きません。 なので、飛行場の様な周りに民家などが無い場所では、基本的に赤いグラフは発生しません。
ところが、1分程度眺めていると、こんな状態↓が一瞬発生したりするのです。 あくまでも瞬間の事で、1秒後の画面では消えてしまいます。 薄青が無い事から、直前まではクリアだったことが判ります。 (この画像は、録画データを再生した時に撮影したものです)
そしてもっと稀にですが、この様な状態↓が見える事もあるのです。 これも一瞬の事で、画面が切り替わると消えてしまいます。
これでも普段と変わらずフライトしていましたが、あまり気持ちの良いものではありませんね。 我々に出来ることは限られているので、引き続きモニターで監視しながらやって行こうと思っているところです。
技術的に色々とお世話になっています。
一昨年、電波モニターと睨めっこしていた時にモニターの端から端へフルスケール近くのとんがった波形を偶に受信していました。
他にはプロポの送信出力以外の受信はありませんでした。
あと、こちらでノーコンになった時は設定したフェイルセーフに入った事はありませんでした。
各サーボが振り切る事が多くてホールドは少なかったです。
因みに28CHは6年位使っていますがノーコンは一度もありません。
また何かあれば連絡します。
フライトコーチを大いに活用頂きご活躍を期待しています。
920MHzのサブシステム付きの件、本当にそうですね。 クラブの複数人がサブシステム付きのプロポに変更中です。 ですが、私個人は28CHプロポへの夢が消えてしまうので思案中です。 何かお気づきの点がございましたら、ご教示をお願いします。
直接的な原因は不明です、解析は難しそうです。 電波モニターで気になる点もあります。 例えば、数分間隔程度(概略です、不定期的?)で、ほぼ全CHに同時に中間レベルの受信を示します。 1~2秒程度の受信時間です。 この信号はドローンでも、違法な2.4GHzトランシーバーでもなさそうです。 2.5GHzを出している某無線基地局が約4㎞の所にあります。 その影響かは不明です。
さすがの機動力ですね。
桑都でも一昨年から小型の2.4G受信機(似てますがボタンは無し)を使用しましたが墜落は防げませんでした。
今ではみんなが集まる時にプロポの出力が少なそうな人に警告するくらいにしか使用していません。
結局920MHzでバックアップするしか無いと思います。
使い始めてみました。 本当は上空の電波を調べなければいけないのですが、実際には無理なので、今のところこんな感じでやって行くしかなさそうです。
Facebookの方で教えてもらったので、リンクを張っておきます。
2.4GHz帯ドローン無線運用の落とし穴「電波のごみ箱」2.4GHzバンド
2.4ghz usb spectrumanalyzer dongle
2.4GHz Portable Spectrum Analyzer USB Dongle
別のタイプのモニターも入荷ですね。
ちょっと話が逸れますが、あさちゃ〜さんのブログの SBD-3の誤動作! には、モーターが暴走した記述がありました。 電波障害のノーコンとは別の様ですが、何にしても怖い話ですね。
電波モニターの紹介ありがとうございます。 このようなツールを使用することで、少しでも安全に飛ばせたらと思います。
クラブ飛行場において3週間での3回のアクシデント(制御不能)。 2.4GHzになってから、混信による制御不能は経験しなかったのが不思議なくらいです。
今週からは電波モニターを常備し、飛行前に必ずモニターすることにしました。
KOプロポの電波モニターの感想です。 優れものです。電波の状況が一目瞭然で非常に判り易いです。 P.Cは必要ですが、操作は簡単、ログとアラーム(警報音)設定もできます。 価格は比較的安く、信頼性も十分、安心して使用できると思います。 安全のために今日も使用しています。 下記の写真は送信機の電源がOFF状態のもの、他の電波も出ていない状態を示しています。
追加です。 P.C不要の2.4GHz電波モニターを購入しました。 まだ家での確認のみです、こちらもそこそこ使えそうな感じがします。 価格は6,000~7,000円です。 充電式電池のため、一度充電すれば10時間程度は持ちそうです。 2時間程度の使用では電池が残量計が100%のままです。 電波状況を見るだけと割り切りが必要です。 警報もログもできません。P.Cが苦手な方には最適と思います。
アマゾンでも販売しています。 <シンプルスペクトラムアナライザ、2.4G周波数スキャン> で検索してください。
下の一番目の写真:2.4GHz Scanner 家の中でのwi-fiの電波をモニター (緑ボタンがON、赤がOFFのボタン) 二番目の写真:DJIドローン (mini2)の送受信機の両電源をONし相互通信時をモニター 三番目の写真:内部構成です。品質は良い感じです。
小型のDC-ACインバーターを新たに購入。 ミュゼット用の3セルバッテリーが使える様に、コネクタを取り換えておきます。
これで、車から離れた所でも100Vを使ってノートパソコンを長い時間使えます。 LiPoの消費電流は変化しますが、2~3Aといった所でした。
東海地区。 使用数に比べ飛行場登録が少ない感じです。
岩手で1件の登録がありました。
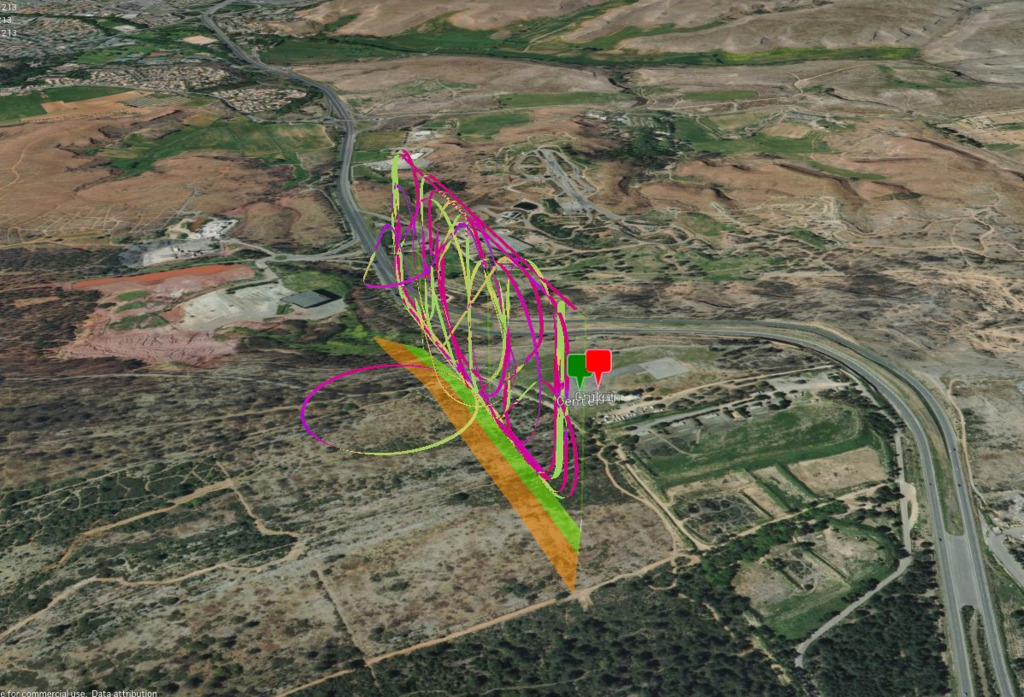
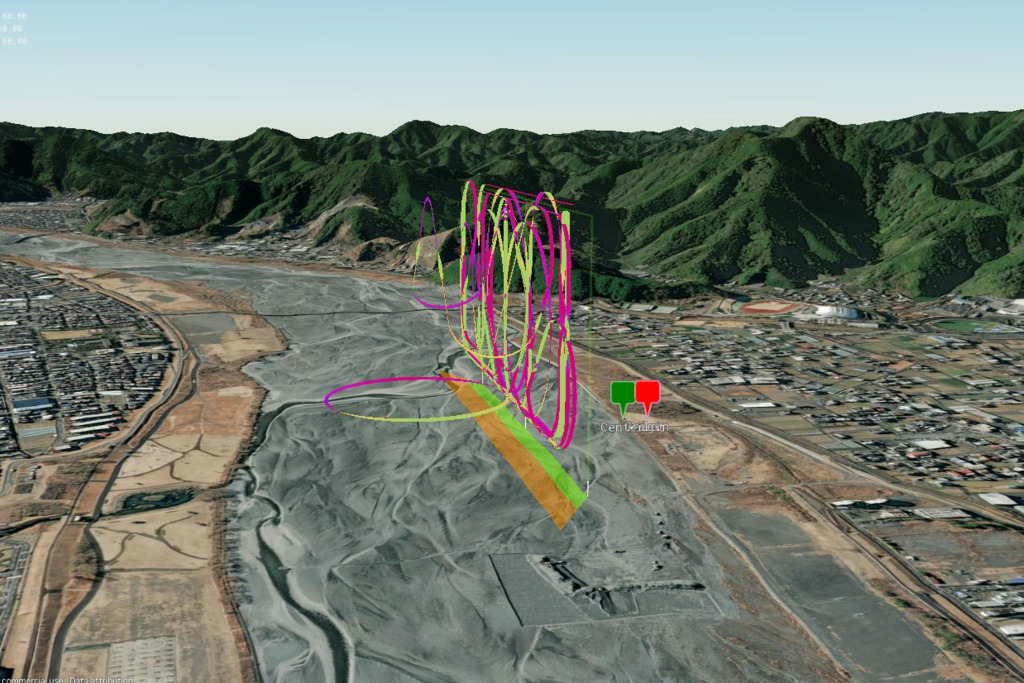
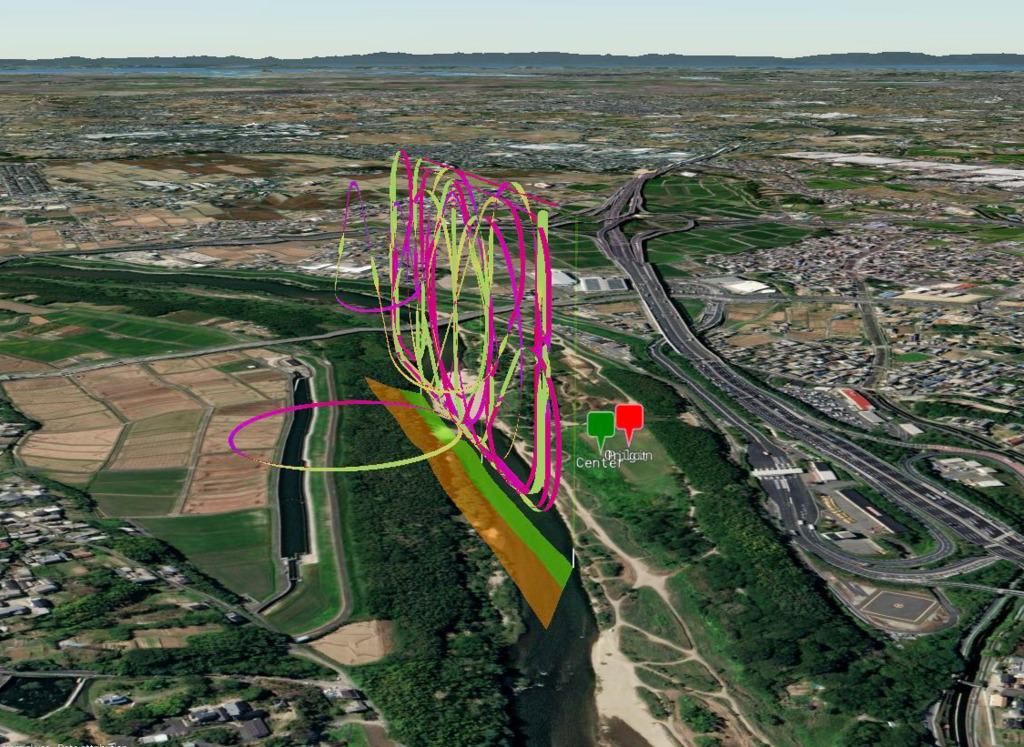
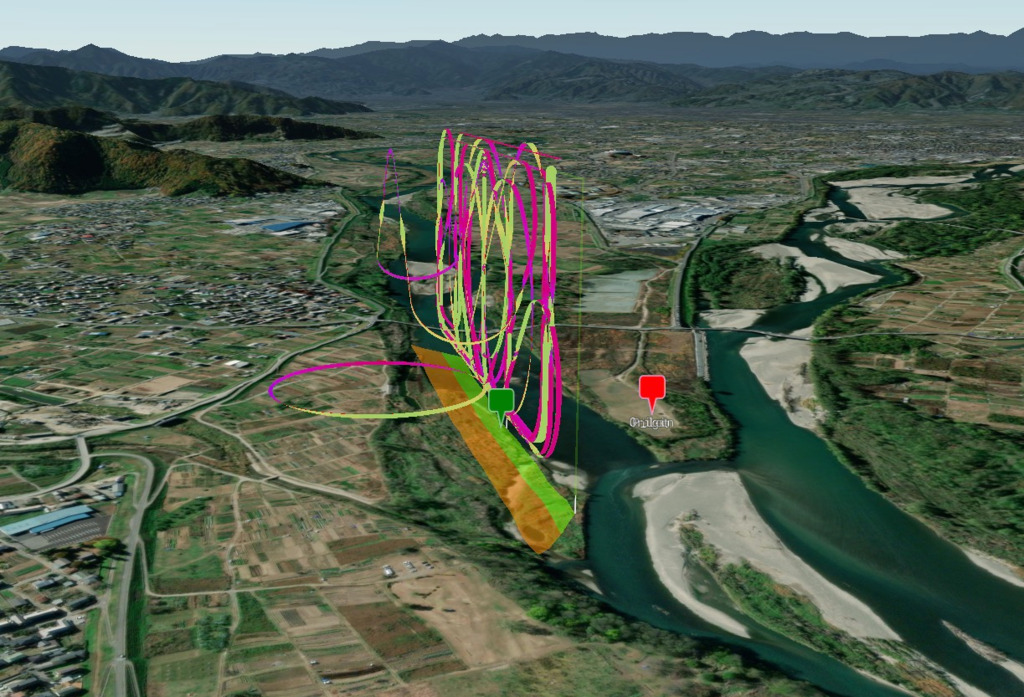
こちらは、ミュゼット単葉によるF3A F-25パターン
ミュゼット単葉によるF3A P-25パターン
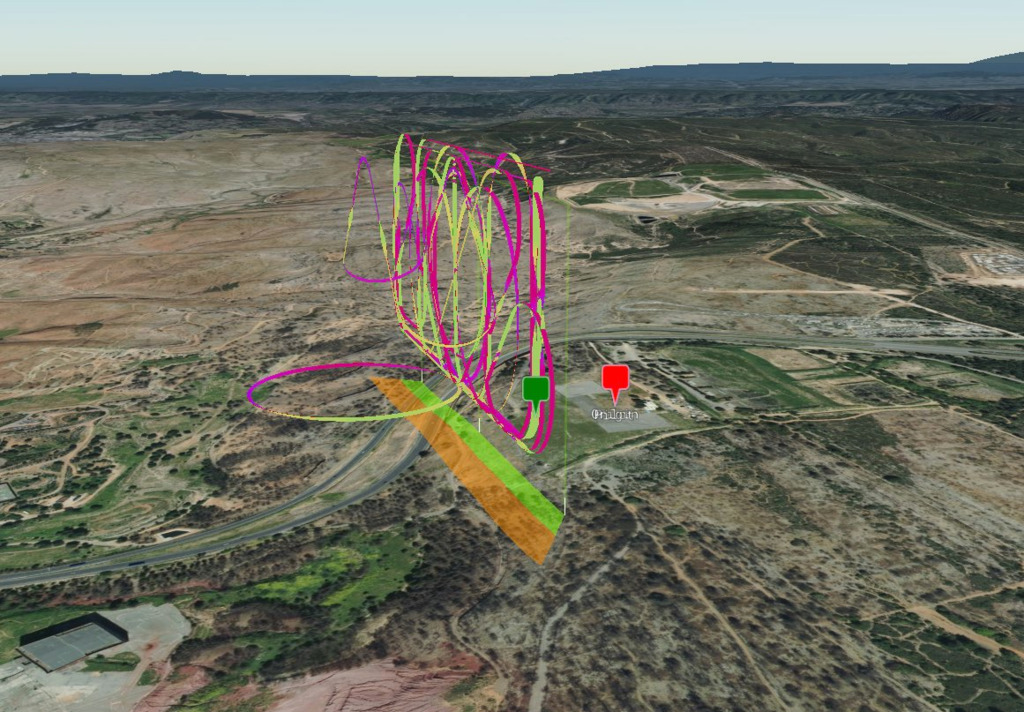
外国選手の中には当然、フライトコーチを使って練習している人もいます。
2023 FAI F3A WORLD CHAMPIONSHIP 開催が近づいて最新情報がアップされてます。 Team Informationでは参加選手の紹介がされています。
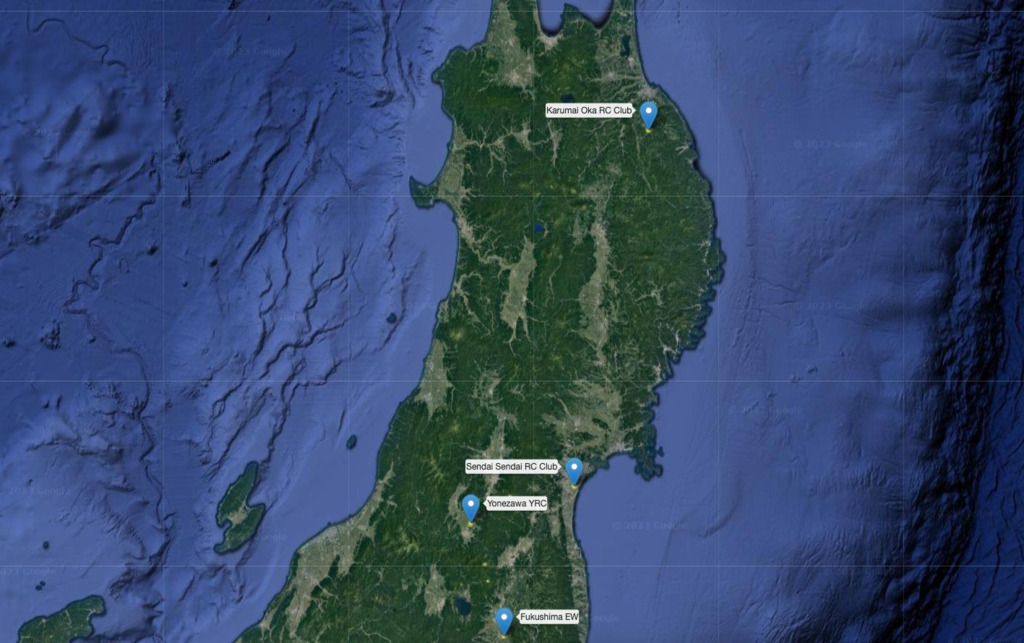
長野で2件の登録がありました。
カスタムサイトの設定はとっても簡単なので、長野と飯山の飛行場もついでにやってみました。 飛行環境が良く分かります。
自分で使ってみると、登録飛行場の便利さが分かりますね。
福知山鬼の里ラジコンクラブのきよっさん(いつまでもアドバンスド)です。 マップ登録頂いた方に感謝いたします。 修正後で問題なく利用できています。 みなさんありがとうございました。
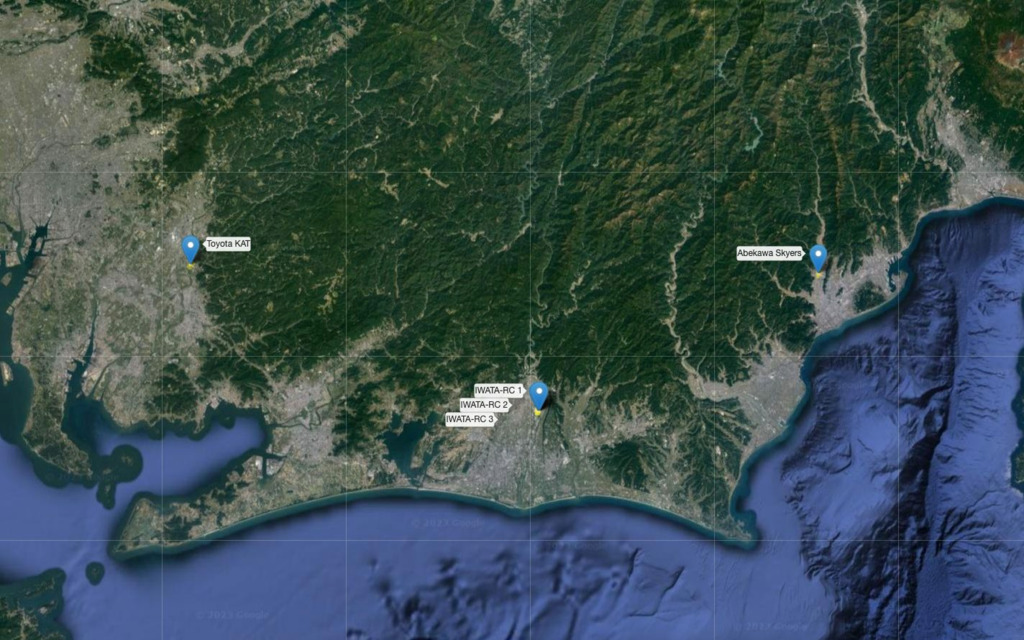
カスタムサイトの一例として、フライトコーチのMapで取り上げた「浜松ラジコン飛行場」を設定してみました。 上流にある「いわたラジコン飛行場」と同時に表示してみると、こんな感じになります。
7月30日に行われる「中部日本RC曲技エキスパート夏季東海地区大会」では、グレートフライヤークラスにF-23があります。
会場となる「浜松ラジコン飛行場」はフライトコーチに登録されていませんが、上流にある「いわたラジコン飛行場」を見ると、Fパターンも問題無く行える環境にある様です。
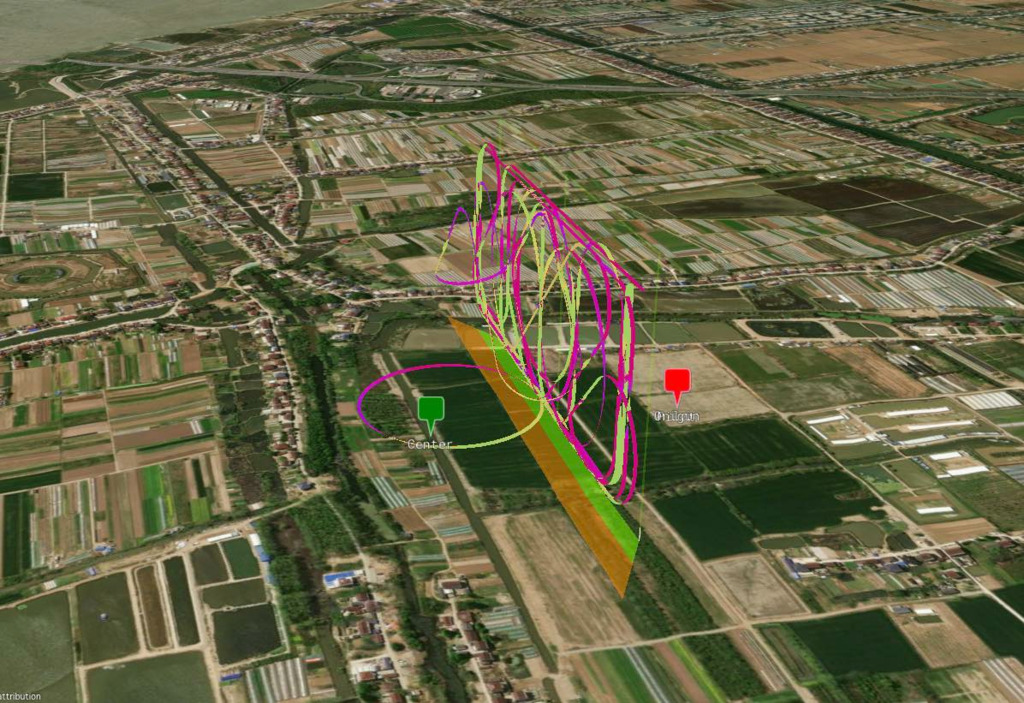
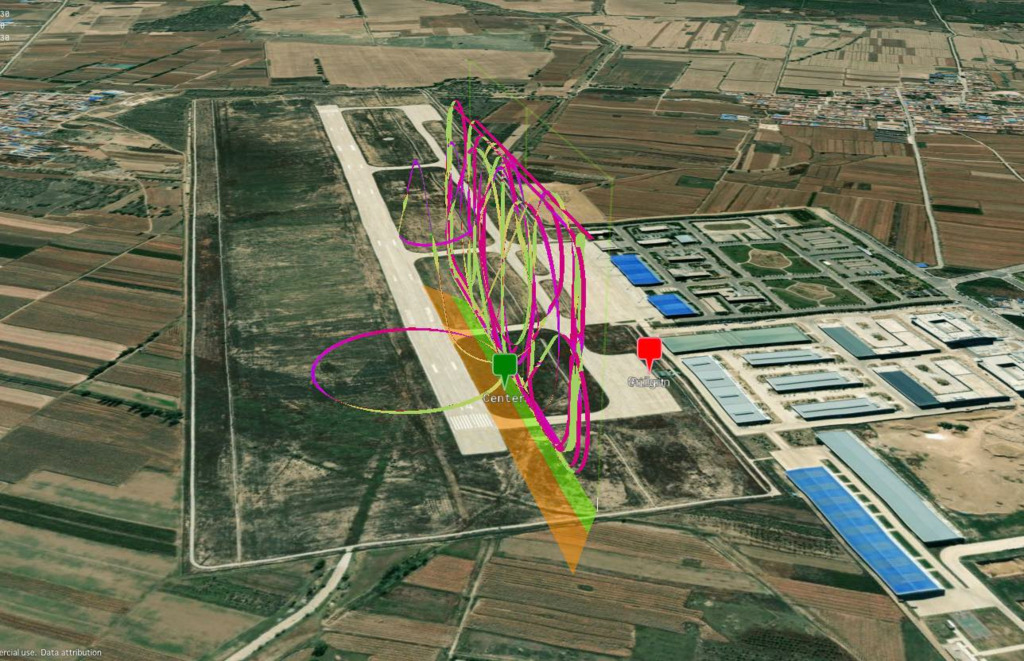
中国で追加の登録がありました。
ネットにアップされていた外国のRKさんのP-23パターン
Rombaut RC FAI-F3A F23

練習場が載っていました。
https://f3a.com.au/2023wch/practise-sites/
飛行場のMapはこちら
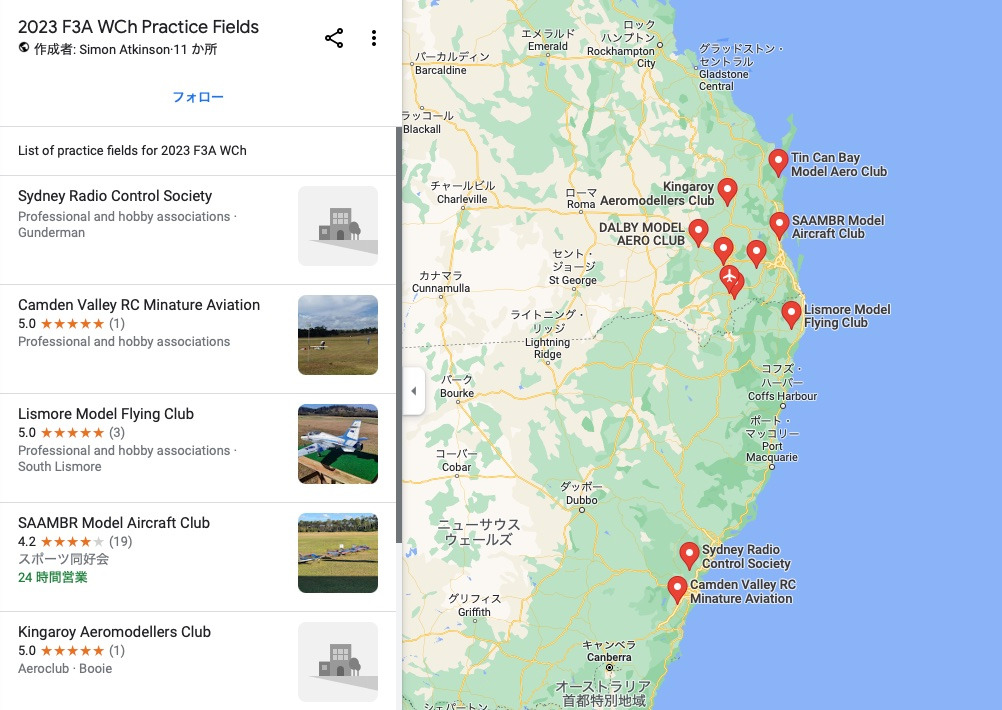
https://goo.gl/maps/JeF2CeBUXBWXfs6h9
距離感が良く分かりませんが、会場から150kmだとこれくらいです。
仮登録申込締め切りは8月12日だそうです。
今日の様子。
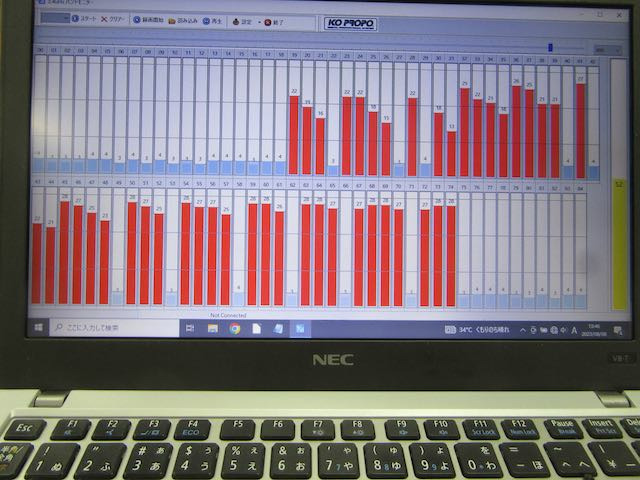
地上のモニターでこれだけ受信できるということは、上空ではもっと酷い状態になっている事が考えられます。
地域によって違いがあると思うので、是非、各地の状況を知らせていただけると有り難いです。
「何も出ていないよ」という情報でも結構です。
今日のバンドモニターの様子。
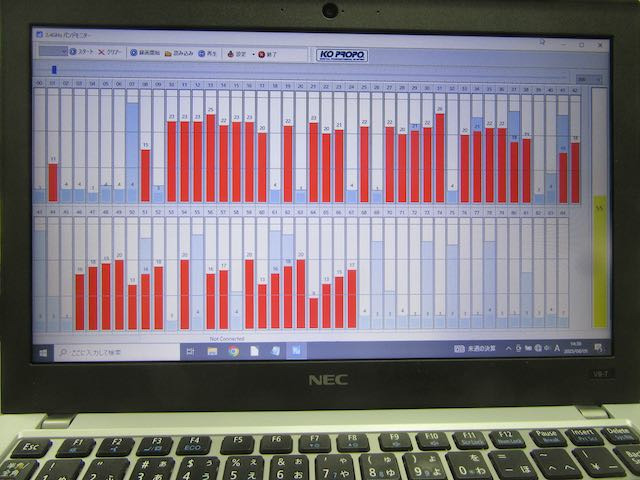
ノイズの頻度は少なめでしたが、その中で一番強いのはこんな感じでした。
一瞬だけなので、フライトしていて感じることはありません。
もし、他の地域でのこの様な画像あれば、アップしていただけると有り難いです。
現地では着々と準備が進んでいます。



競技会を開催するのは大変な事です。
F3Aパターン競技で大切な事は、ルールに則っているかどうかになります。
格好良く飛べば良いというものではありません。
パターンフライトの資料
審査員のためのヒント
・採点は減点方式となっています。
・後からスコアを考えるのは印象判断です。
・競技中は他の審査員のスコアを無視します。スコアについて会話しないでください。個々の価値で各操縦を採点します。
製品の紹介ありがとうございます。
色々試してみたのですね。
https://morris-hobby.securesite.jp/7_1881.html
モーリスホビーさんでS WAVEというフタバ送信機対応の920Mhzバックアップシステムを売っています。
これの良いところは20フライト位のログデータがスマホですぐに見れるところです。
このログデータを見ると沢山出ているフタバの電波形式でどれが良いかはっきり解ります。
昨年色々試した結果S-FHSSが1番良かったですが、フタバ純正の受信機は危険で使えません。
今のところコロナの受信機が調子が良く墜落が一度も桑都ではありません。
サンプル数は少ないので参考までに。
今日の電波状況です。

個人でできる事としては、今のところそれしか考えられないという事ですね。
対応する製品が限られているこのままだと、RC人口は益々少なくなってしまうでしょうね。
TM-18を使用するためF社の送受信機ともに購入しました。
色々調べてもこれしかないのが現状です。
残り少ない(?)ラジコン人生、安全のためと割り切りました。
ところで前回、
クロスの飛行場から4Kmの所に携帯基地局があるとお伝えしました。
真偽は不明ですが、WiMAX+2は2.5GHz帯を使用しているとの情報もあります。
その電波が飛行場での電波モニターで一瞬モニタされる異常信号なのか
また、R/Cの2.4GHz帯に干渉するかは不明です。
私が聞いている身近なノーコン情報では、
桑都:約6Km程度の所に同じ携帯基地局があるようです。
熊谷:約4Km程度の所に同じ携帯基地局があるようです。
偶然の一致かもしれません。
携帯基地局マップで検索すると判ります。
Facebookメンバーのみ視聴可能。
フライトコーチがやって来た
サンプル画面
先に紹介した2.4GHz帯ドローン無線運用の落とし穴にもある様に、2.4GHzが「電波のごみ箱」状態になってしまうなら920MHzの利用もRC界の流れだという事ですね。
ただ実際のところRCフライヤーとしては製品が無ければどうしようもありません。
現在手に入るといったら、これだけでしょうか?
TM-18
Team Informationのニュージーランドを見ると、Official Helperに見慣れた顔があります。
フライトコーチのMapでフランスの大会の事を紹介しましたが、今回の世界選手権は実力者が揃っていて、決勝に残るだけでも大変な事だと思います。
フランスのMACAP飛行場。
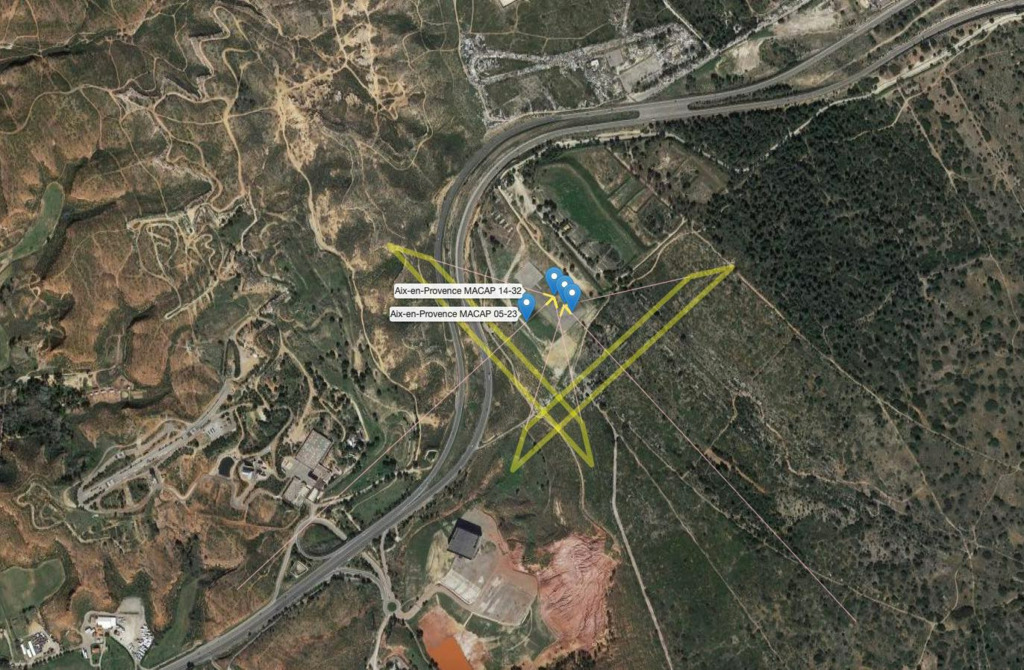
2面ありますが、一方は道路の上です。
7月13日〜16日に、この場所でフランス国内のF3A選手権が行われ、Stephane Carrier選手がCPLR選手を抑えて優勝しました。

https://voltige.sport.ffam.asso.fr/championnat-de-france-f3a-2023-aix-en-provence-macap/
Stephane Carrier選手は世界選手権のフランス代表にもなっています。
https://f3a.com.au/2023wch/team-information/
モーリスホビーさんから聞いた話ですが、業務に使用しているドローンは都心等では2.4GHzは使いものにならないので殆ど920Mhzで運用しているそうです。
ラジコン飛行機も920MHzをメインにして2.4Ghzはバックアップ程度に使うようになるかもしれませんね。
2.4GHzモニターの画像を紹介しておきましょう。
当然赤いグラフが受信した電波を表しています。
実際の画面は1秒毎に更新され、直前のデータが薄青で残っています。
RCプロポの例
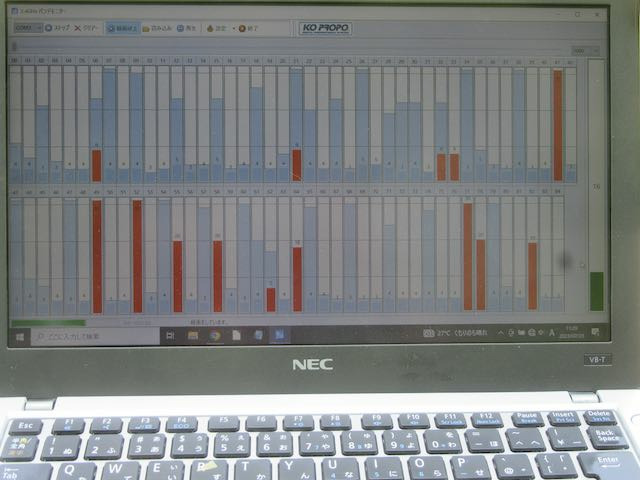
薄青のグラフが色々なCHに見えます。
ドローンの例
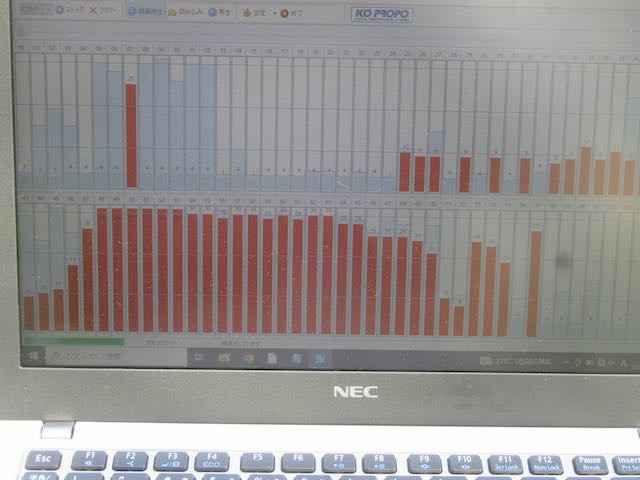
凄い使用量ですね。
複数台あったら空きCHが無くなってしまいます。
2.4GHzは直進性が強いので、RCプロポの様な弱い電波は地上では遠くまで届きません。
なので、飛行場の様な周りに民家などが無い場所では、基本的に赤いグラフは発生しません。
ところが、1分程度眺めていると、こんな状態↓が一瞬発生したりするのです。
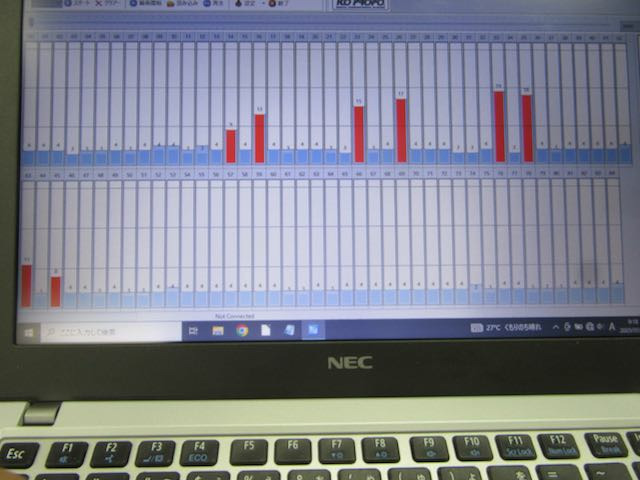
あくまでも瞬間の事で、1秒後の画面では消えてしまいます。
薄青が無い事から、直前まではクリアだったことが判ります。
(この画像は、録画データを再生した時に撮影したものです)
そしてもっと稀にですが、この様な状態↓が見える事もあるのです。
これも一瞬の事で、画面が切り替わると消えてしまいます。
これでも普段と変わらずフライトしていましたが、あまり気持ちの良いものではありませんね。
我々に出来ることは限られているので、引き続きモニターで監視しながらやって行こうと思っているところです。
技術的に色々とお世話になっています。
一昨年、電波モニターと睨めっこしていた時にモニターの端から端へフルスケール近くのとんがった波形を偶に受信していました。
他にはプロポの送信出力以外の受信はありませんでした。
あと、こちらでノーコンになった時は設定したフェイルセーフに入った事はありませんでした。
各サーボが振り切る事が多くてホールドは少なかったです。
因みに28CHは6年位使っていますがノーコンは一度もありません。
また何かあれば連絡します。
フライトコーチを大いに活用頂きご活躍を期待しています。
920MHzのサブシステム付きの件、本当にそうですね。
クラブの複数人がサブシステム付きのプロポに変更中です。
ですが、私個人は28CHプロポへの夢が消えてしまうので思案中です。
何かお気づきの点がございましたら、ご教示をお願いします。
直接的な原因は不明です、解析は難しそうです。
電波モニターで気になる点もあります。
例えば、数分間隔程度(概略です、不定期的?)で、ほぼ全CHに同時に中間レベルの受信を示します。
1~2秒程度の受信時間です。
この信号はドローンでも、違法な2.4GHzトランシーバーでもなさそうです。
2.5GHzを出している某無線基地局が約4㎞の所にあります。
その影響かは不明です。
さすがの機動力ですね。
桑都でも一昨年から小型の2.4G受信機(似てますがボタンは無し)を使用しましたが墜落は防げませんでした。
今ではみんなが集まる時にプロポの出力が少なそうな人に警告するくらいにしか使用していません。
結局920MHzでバックアップするしか無いと思います。
使い始めてみました。

本当は上空の電波を調べなければいけないのですが、実際には無理なので、今のところこんな感じでやって行くしかなさそうです。
Facebookの方で教えてもらったので、リンクを張っておきます。
2.4GHz帯ドローン無線運用の落とし穴「電波のごみ箱」2.4GHzバンド
2.4ghz usb spectrumanalyzer dongle
2.4GHz Portable Spectrum Analyzer USB Dongle
別のタイプのモニターも入荷ですね。
ちょっと話が逸れますが、あさちゃ〜さんのブログの
SBD-3の誤動作!
には、モーターが暴走した記述がありました。
電波障害のノーコンとは別の様ですが、何にしても怖い話ですね。
電波モニターの紹介ありがとうございます。
このようなツールを使用することで、少しでも安全に飛ばせたらと思います。
クラブ飛行場において3週間での3回のアクシデント(制御不能)。
2.4GHzになってから、混信による制御不能は経験しなかったのが不思議なくらいです。
今週からは電波モニターを常備し、飛行前に必ずモニターすることにしました。
KOプロポの電波モニターの感想です。
優れものです。電波の状況が一目瞭然で非常に判り易いです。
P.Cは必要ですが、操作は簡単、ログとアラーム(警報音)設定もできます。
価格は比較的安く、信頼性も十分、安心して使用できると思います。
安全のために今日も使用しています。
下記の写真は送信機の電源がOFF状態のもの、他の電波も出ていない状態を示しています。
追加です。
P.C不要の2.4GHz電波モニターを購入しました。
まだ家での確認のみです、こちらもそこそこ使えそうな感じがします。
価格は6,000~7,000円です。
充電式電池のため、一度充電すれば10時間程度は持ちそうです。
2時間程度の使用では電池が残量計が100%のままです。
電波状況を見るだけと割り切りが必要です。
警報もログもできません。P.Cが苦手な方には最適と思います。
アマゾンでも販売しています。
<シンプルスペクトラムアナライザ、2.4G周波数スキャン>
で検索してください。
下の一番目の写真:2.4GHz Scanner 家の中でのwi-fiの電波をモニター
(緑ボタンがON、赤がOFFのボタン)
二番目の写真:DJIドローン (mini2)の送受信機の両電源をONし相互通信時をモニター
三番目の写真:内部構成です。品質は良い感じです。
小型のDC-ACインバーターを新たに購入。

ミュゼット用の3セルバッテリーが使える様に、コネクタを取り換えておきます。
これで、車から離れた所でも100Vを使ってノートパソコンを長い時間使えます。

LiPoの消費電流は変化しますが、2~3Aといった所でした。
東海地区。
使用数に比べ飛行場登録が少ない感じです。
岩手で1件の登録がありました。
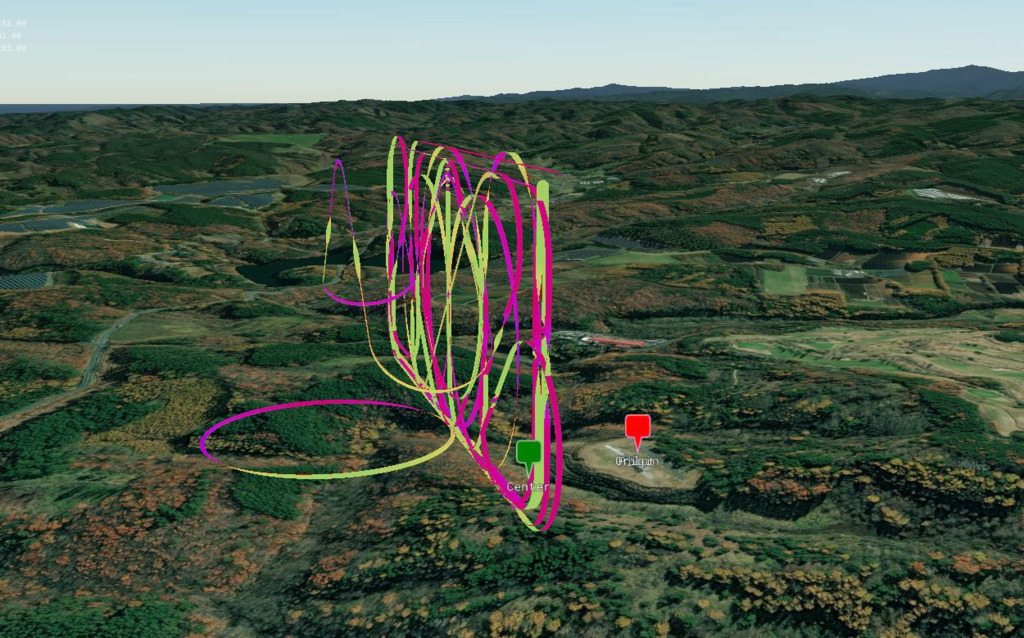
こちらは、ミュゼット単葉によるF3A F-25パターン
ミュゼット単葉によるF3A P-25パターン
外国選手の中には当然、フライトコーチを使って練習している人もいます。
2023 FAI F3A WORLD CHAMPIONSHIP 開催が近づいて最新情報がアップされてます。
Team Informationでは参加選手の紹介がされています。
長野で2件の登録がありました。

カスタムサイトの設定はとっても簡単なので、長野と飯山の飛行場もついでにやってみました。


飛行環境が良く分かります。
自分で使ってみると、登録飛行場の便利さが分かりますね。
福知山鬼の里ラジコンクラブのきよっさん(いつまでもアドバンスド)です。
マップ登録頂いた方に感謝いたします。
修正後で問題なく利用できています。
みなさんありがとうございました。
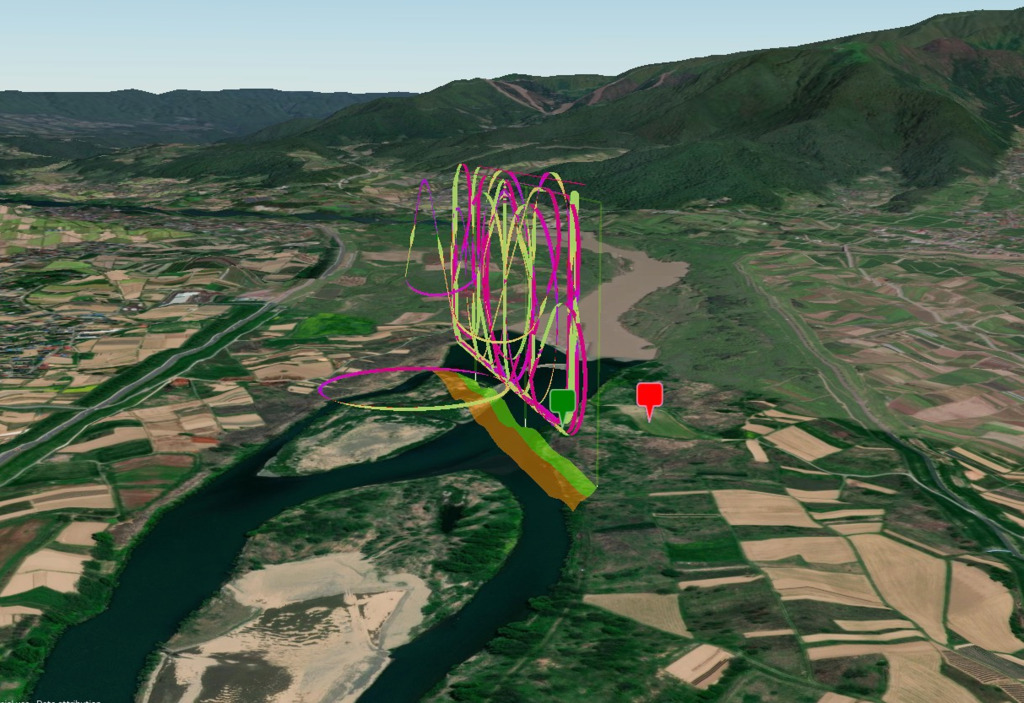
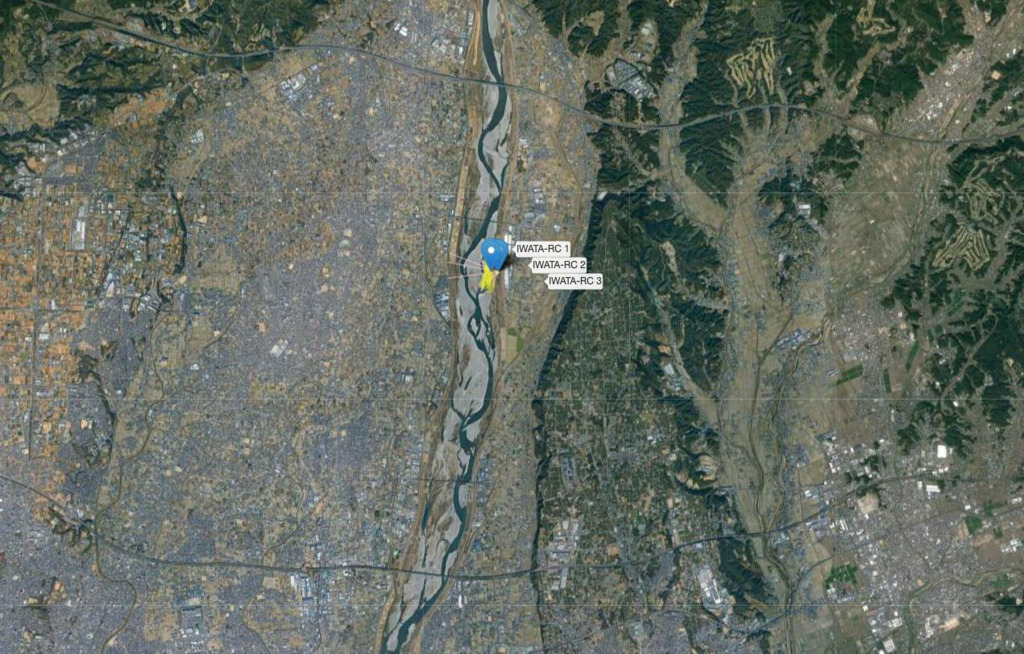
カスタムサイトの一例として、フライトコーチのMapで取り上げた「浜松ラジコン飛行場」を設定してみました。

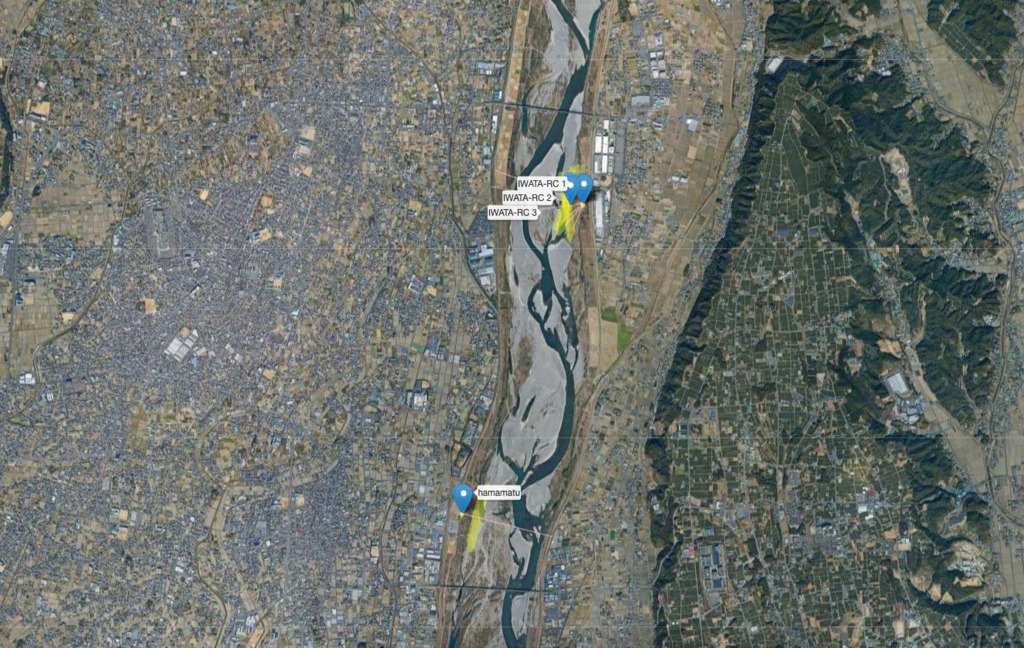
上流にある「いわたラジコン飛行場」と同時に表示してみると、こんな感じになります。
7月30日に行われる「中部日本RC曲技エキスパート夏季東海地区大会」では、グレートフライヤークラスにF-23があります。
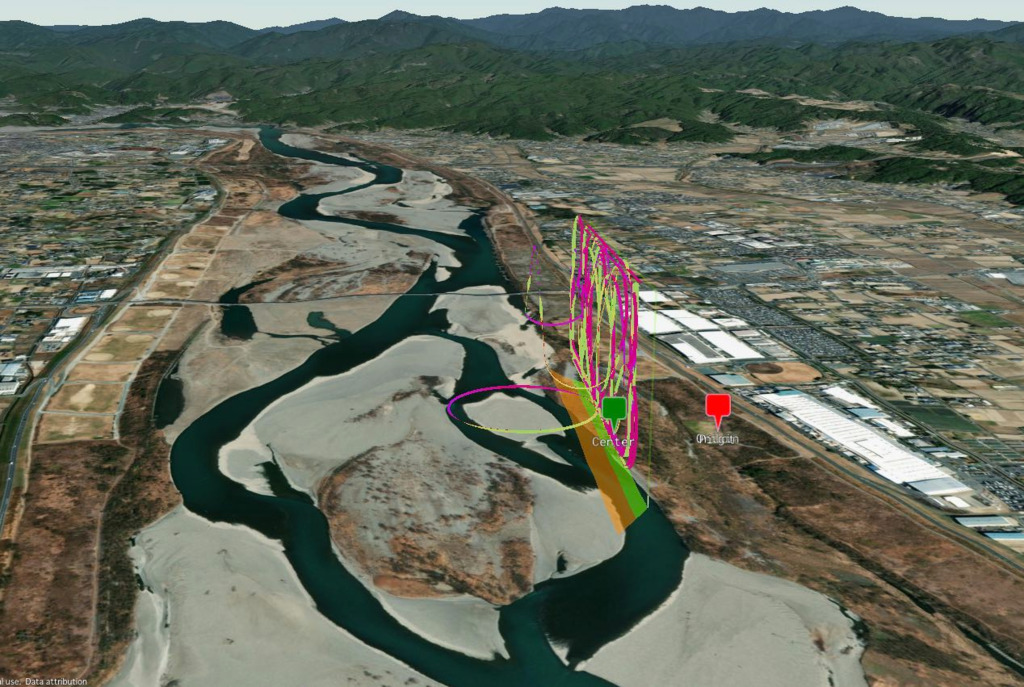
会場となる「浜松ラジコン飛行場」はフライトコーチに登録されていませんが、上流にある「いわたラジコン飛行場」を見ると、Fパターンも問題無く行える環境にある様です。
中国で追加の登録がありました。


ネットにアップされていた外国のRKさんのP-23パターン
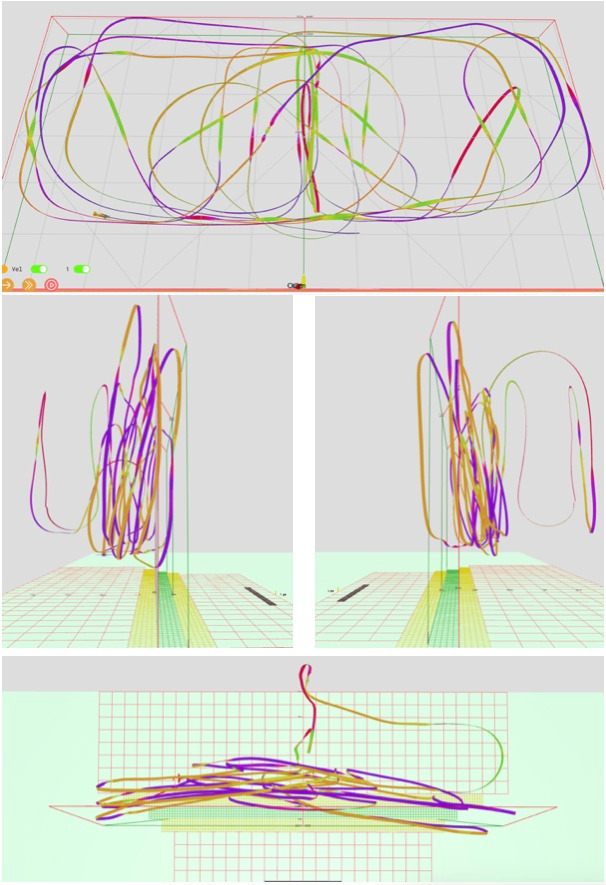
Rombaut RC FAI-F3A F23
musetteです