スマホのアプリでGPS電波強度を調べてみます。

青色や茶色が多いので今日のコンディションは良好。
そのせいか、フライトコーチのエラーは少なめ。
もちろん、たまにはいつものエラーは出ますが、
多くは問題無く再現できました。

1つ面白かったのは、メンバー3人で電波強度画面を見せあった時の事。
みんな、表示される強度がバラバラなんです。
機種によって受信能力がかなり違っている事が分かりました。
数値で比べるのでは無く、自分のスマホなりの経験で判断するしか無さそうです。

スマホのアプリでGPS電波強度を調べてみます。
青色や茶色が多いので今日のコンディションは良好。
そのせいか、フライトコーチのエラーは少なめ。
もちろん、たまにはいつものエラーは出ますが、
多くは問題無く再現できました。
1つ面白かったのは、メンバー3人で電波強度画面を見せあった時の事。
みんな、表示される強度がバラバラなんです。
機種によって受信能力がかなり違っている事が分かりました。
数値で比べるのでは無く、自分のスマホなりの経験で判断するしか無さそうです。

電波状況は、場所や時間で刻々と変わっています。


衛星チェックアプリをスマホに入れておいて、普段の状態がどの程度なのか経験しておくと良いでしょう。
ミッションプランナーで、Binファイルから衛星捕捉数を確認する方法を教えて頂きました。
まず、ミッションプランナーをインストールします。
バージョンが古いと、新しいBinファイル展開時に不具合が発生するので注意してください。
Installing Mission Planner
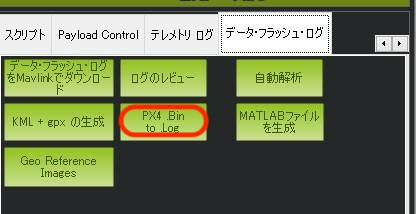
画面中央の<>ボタンから「データ・フラッシュ・ログ」を呼び出してクリックします。

「PX4 Bin to Log」ボタンを押して、調べたいBinファイルを指定すると、自動的に同じ置き場にLogファイルが生成されます。
続いて、「ログのレビュー」を押して、先のLogファイルを指定するとグラフ画面になります。
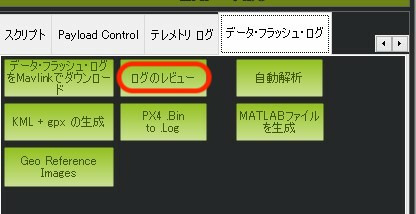
右側のGPS>NSatsにチェックを入れると衛星捕捉数が出てきます。
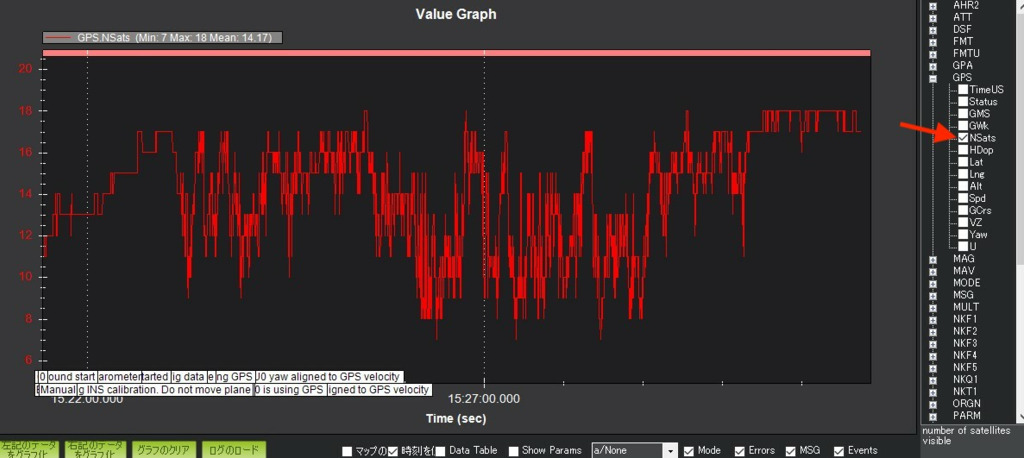
衛星捕捉数は12以上は必要で、少ないとジャンプなどが発生する様です。
わかり易い説明に感謝です。
私もやってみました。
使用機器は、Mini-Pix + TS100 V2(M10 GPS)です。
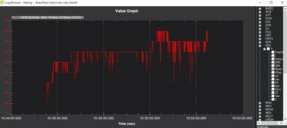
先週土曜日のフライト、P25です。
衛星補足数 NSats : 最低11 、最大27、平均24.26です。
ボーダーライン12を下回った箇所が極短時間に一か所あります。
しかし、ジャンプ等の異常は見られませんでした。
同グラフ上に各センサーのエラー検討用のパラメータを入れました。
XFK4 にある下記のパラメータです。
測定の不確実性、予測の不確実性から決定されたものです。
各パラメータは予想値と測定値の差のバラつきを示したもので、
1以下の値が望ましいようです。
今回データは最大値が0.56と各項目とも1以下でした。
SV:速度エラー検出したもの。

SP:位置のエラー検出したもの。
SM:コンパスのエラー検出したもの。
SH:高度のエラー検出したもの。(今回は非表示)
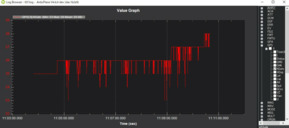
先週土曜日のログを見てみました。
FCはH743-SLIM V3
GPSはM10Q-5883
SDカードはUHS-I U3 V30
異常は見られませんでした。
飛行場が木も殆ど無く開けた所なので、
衛星補足数も精度も良いのでGPSにとっては条件のいいところなんだと思います。
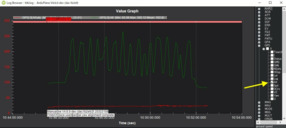
今回の使用機器は、SpeedyBee F405 Wing + M10 GPS(実装テスト中)です。
フライトはP25です。
衛星補足数 NSats : 最低25、最大32、平均30.8
ボーダーライン 12を大きく上回った結果でした。
XFK4の各センサーのパラメータです。
最大値が0.65と各項目とも1以下で問題無しでした。
フライトコーチが登場してからもう3年。
その間、GPSアンテナもM8>M9>M10と世代が進んで、性能アップした様子が良く分かる結果ですね。
M8、M9の最大18個の衛星補足数に比べてM10は32個とほぼ2倍です。
GPSの性能が進化がしています。
補足開始も短時間になっていると感じます。
比較的低めな価格設定もうれしい話です。
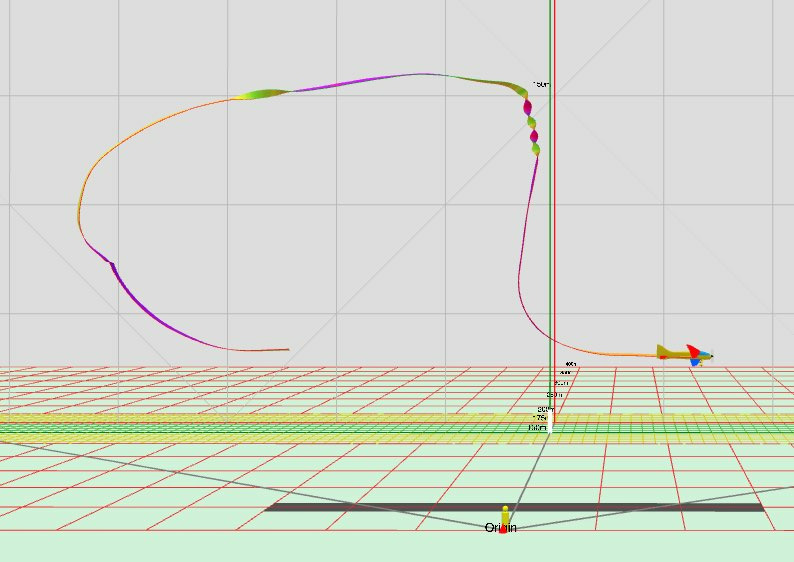
今日の11時頃は風があったのですが、M10 GPSの調子を見てきました。
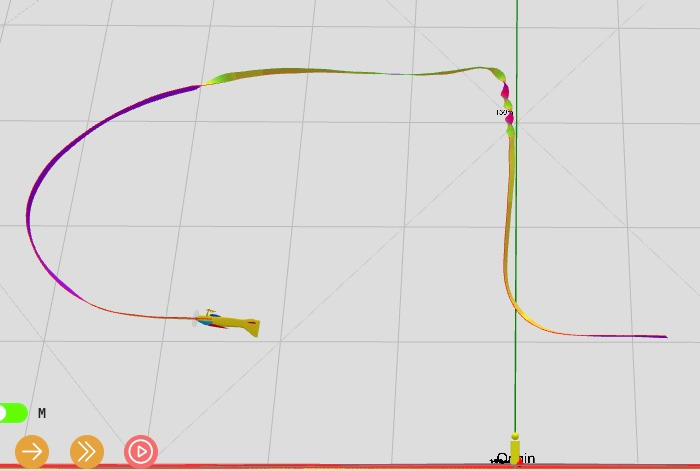
リボン図に問題はありません。
この時の衛星捕捉数
Altにチェックを入れると高度が分かるので、離陸のタイミングが分かります。
2フライト目は最初から捕捉数が多いです。
衛星捕捉数をリアルタイムで確認することが出来るフタバ製のPIXHAWK用テレメトリーアダプタを入手しました。
試行錯誤の末、搭載フライトコーチの情報を送信機側でリアルタイムで確認(見る、音声)ができました。
なお、天気が悪くまだ家の中でしか試していません。
屋外での確認は次週になりそうです。
取得情報は、以下のとおりです。
GPSの衛星補足数(NSats)
GPSの水平位置の相対精度(HDOP)
高度 (Alt) (m)
対地速度(Vel) (Km/h)
私の使用機器です。
送信機:フタバ製 T16IZ SUPER
受信機:同 R7308SB
テレメトリー アダプター :同 SBS-01ML
フライトコーチ:(動作確認済み)
*PIXHAWK4 MINI
*PIXHAWK MINI
*RadioLink Mini Pix
試運転の段階ですが、十分に使えそうです。
一番の目的は降下速度の抑制が目的です。降下侵入時の水平速度を確認できればその速度調節をすることで
降下時の初速を抑え降下終了時の速度を抑制できると考えています。
また、離陸時の衛星捕捉がリアルタイムで可能なので非常に重宝しそうです。
降下侵入時-->降下への進入時
追加です。
Speedybee F405 wing でも動作確認できました。
PIXHAWK用と記載がありますが、ArdupilotでテレメトリーがMAVLINKで動作するのものであればOKな感じです。
飛行場でテレメトリー動作を確認をしました。
GPS状態が送信機側のテレメトリーで確認できる安心感があります。
対地速度のみリアルタイムモニターしました。
イヤホンを使用し片耳の聴き取りで十分に使用できます。
1秒間隔モニタでは五月蠅すぎ、2秒間隔が良い感じ。
ただし、飛行に集中できないことが欠点です。
改良点の要望です。
1、対地速度のみ音声出力に設定ですが、
「電圧は***ボルト」と5回に1回の割合で出力されます。
2、速度を小数点以下まで読み上げるので煩わしいです。
3、チッ、チッと変な音(電子的切替音)が気になります。
テレメトリーアダプタ:フタバ社製 SBS-01ML
機体:アンセム70
フライトコーチ:SpeedyBee F405 wing + M10 GPS
パターン:P25、ほぼ無風
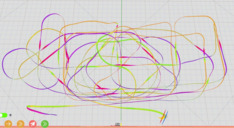
コメント2の段階で、「マップ」にチェックを入れると航空写真の上に航跡が表示されます。
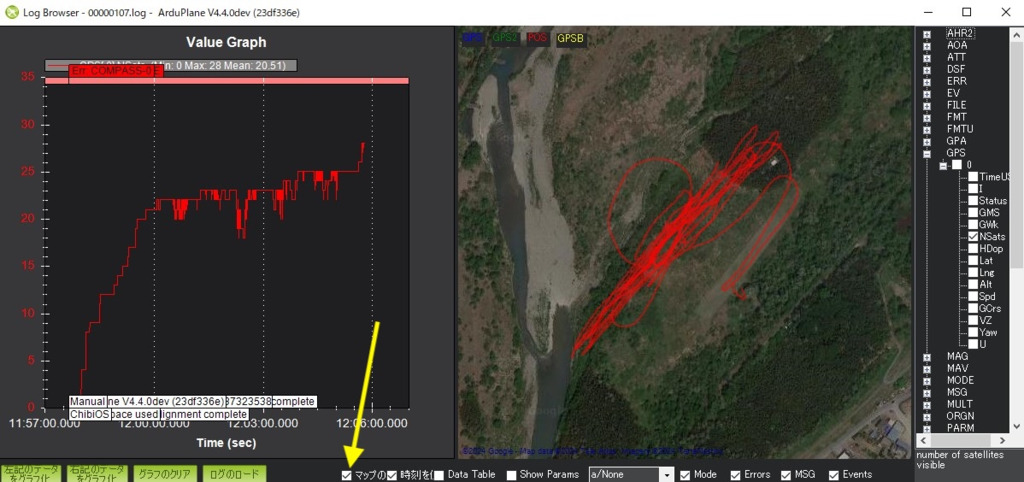
同じ事はFC Geoでもできますが、ここで大事なのは「地形に惑わされたコースになっていないか」の確認です。
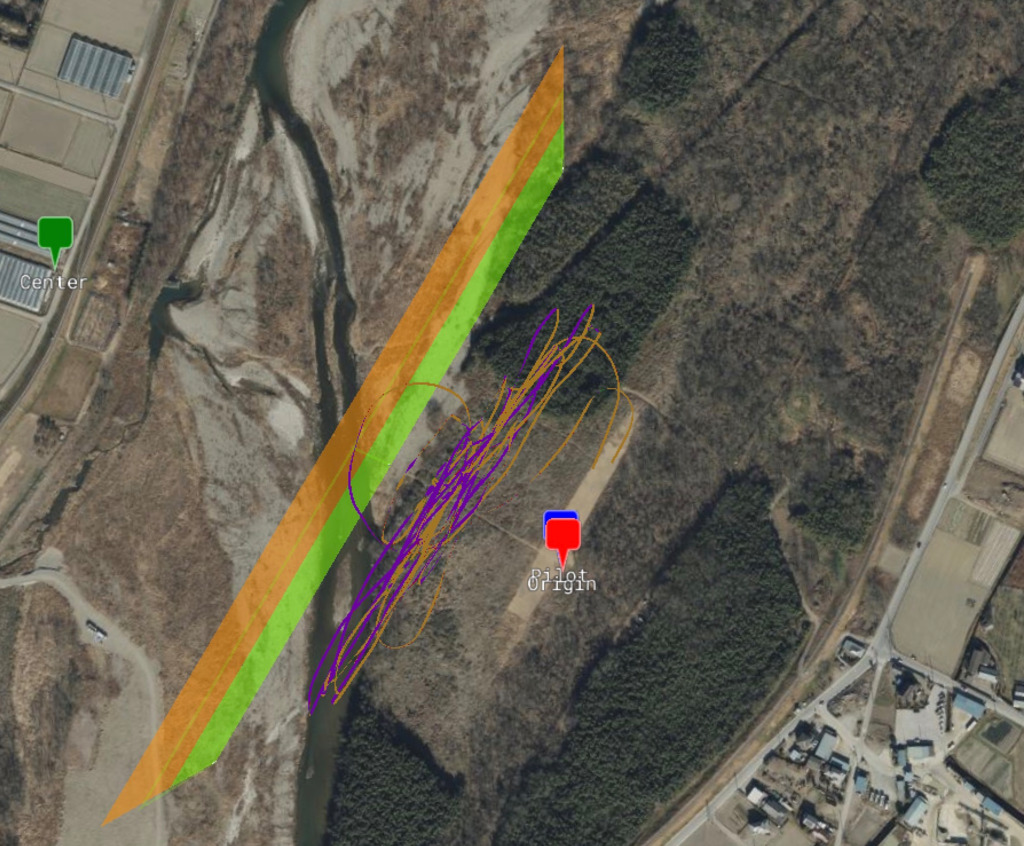
滑走路の形状やフライトエリアの景色によって演技面が曲がってしまう事は良くあるので、気をつけなければなりません。