というわけで自分でビルドすればよくArdupilotのwebサイトにそのための情報もありますが
Building the code https://ardupilot.org/dev/docs/building-the-code.html
Linuxが直ぐ動くマシンが無く、他にやりたいことが多々あり、このだめだけにWSL(Windows Subsystem for Linux)をセットアップするのも面倒です。
FCのボードは他にOmniBus F4 V3も手元にあるため、VLVのユニットの修理はそちらで行おうかと思っています。

今日提出しました。
これまで3件の提出があった様です。
もう直ぐ締め切りなので、私もブログにアップした昨日のフライトを提出してみました。
BINファイルの開き方は、フライトコーチの始め方の冒頭と、コメント5で説明していますが、
今回ダウンロードしたBINファイルも同様の手順で開きます。
その方法ですが
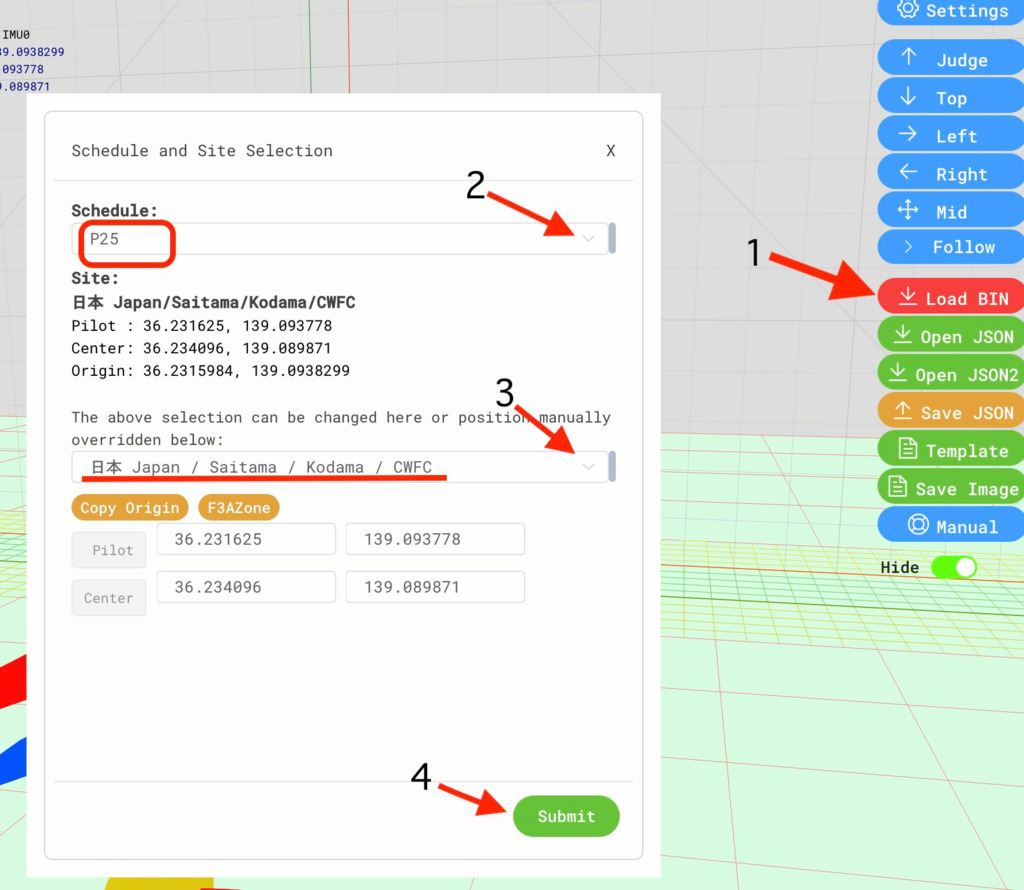
・まず、プロッターの「Load BIN」ボタンを押してスタート。(添付画像の1)
・ダウンロードして保存しておいたBINファイルを選んで、「開く」を押します。
・途中、添付画像の様な補助画面が出るので、演技名や飛行場所の選択をします。(添付画像の2と3)
私のフライトのBINファイルの場合は、添付画像と同じ様に選択項目を設定してください。
3は自動的に表示されているはずです。
これはこの飛行場が登録済みの飛行場だからです。
未登録の場所では、緯度経度を自分で入力する事になります。
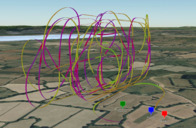
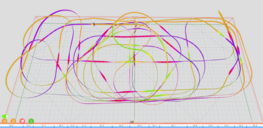
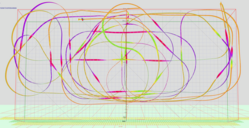
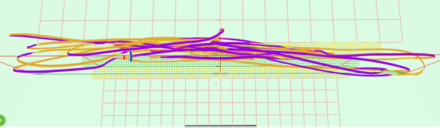
・補助画面の「Submit」ボタンを押すと、リボン図が出てきます。(添付画像の4)
フライトコーチでは、BINファイルをプロッターで開いてリボン図を再現させる事が最初の作業になるので、必ず練習しておく必要があります。
コツがわかれば簡単な作業です。
私などは、フライト毎にこれを行なって航跡の確認をしています。
BINファイルは誰のものでも開くことは可能ですが、
一点だけ異なるのは「飛行場所」です。
これについては、後ほど、追い追い説明しますが、
そのためにも、まず、ダウンロードした私のBINファイルで試して体験して欲しいのです。
Templateを動かしてみて動作環境に異常が無い事が確認できたら、次は実際に機体にユニットを搭載してデータ収集となります。
飛行データはマイクロSDカードに「BINファイル」の名前で保存されます。
この「BINファイル」の開き方は
フライトコーチの始め方 /コメント5
で説明しています。
一例として実際の「BINファイル」をアップしておきますので、開示の練習に使ってみてください。
P25_055.BIN
使い方は、
まず、上記リンクをクリックしてからファイルをダウンロードして保存します。
ダウンロード後には「開く」の表示が出るかもしれませんが、それはパスします。
実際開くにはブックマークしておいた「フライト・プロッター」を使います。
あとは、フライトコーチの始め方 /コメント5 の手順にある様に、赤の「Load BIN」ボタンを押して開始です。

それと、この同じフライトを編集して「JSONファイル」としてアップしておきました。
こちらの方が開く手間がかからなくて見やすいので、
ダウンロードして保存した後に、緑の「Open JSON」ボタンから開いてみてください。
P25_055.json
上記説明には省略した部分もあるので、実際にリンク先へ行ってみて分からない事があったら連絡ください。
Rombaut RC
繰り返しになりますが、
Templateを開く手順はこちらです。
https://zawazawa.jp/flightcoach/topic/39/29
ArduPilotの自動曲技機能でスポーツマンクラスの演技(ログデータ再現)
説明不足のところが沢山あると思うので、疑問点など何でも書き込んでください。
ご対応ありがとうございます。
感謝申し上げます。
熟読&トライしてみます!!
P-25のテンプレート
2024年度 F3A曲技日本選手権
10月2日(水)~6日(日)
高知県高知市 高知ラジコンクラブ飛行場
現在の登録飛行場。


登録していなくてもフライトコーチは使えるので、実際にはもっと多くの人たちが体験しています。
鈴木悠平さんのブログより
「ASFC F3A WORLD CUP🇨🇳参加してきました!」
https://suzukiseisakujo.livedoor.blog/archives/4378413.html
スイス国内のF3A選手権
https://modellflug.ch/events.aspx?Event=7361&lang=DE&fbclid=IwY2xjawFDBgtleHRuA2FlbQIxMAABHShOftqzc1Te-dWEqQMiYufTiERi9nDjOwYmaDEaMsadW-VZtAHIQ9HMxw_aem_ifIu759t9Ivk0fLufKEbVA
今の所2件の提出の様です。
開発環境を構築し、.HEXファイルを作成することができました。
ここまでのポイントを以下に天気します。
>Omnibus F4 V3S Plus フライトコントロールのサポート
https://github.com/ArduPilot/ardupilot/issues/21684
>このボードには、さまざまなセンサーと方向を持つ複数のバリエーションが付属しているため、問題があります。このため、>専用のファームウェアを使用することはできないと思います。
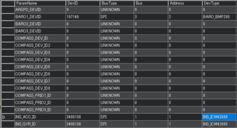
>Betaflight Configulatorでボード情報を見てみると
>GYRO=ICM42688P, ACC=ICM42688P, BARO=BMP280
>だったのでardupilot-masterのフォルダを"ICM42688P"でGrepしたところhwdef.datで出てて来るのは以下のボードだけでした。
>というわけで自分でビルドすればよくArdupilotのwebサイトにそのための情報もありますが
>Building the code
https://ardupilot.org/dev/docs/building-the-code.html
なので10年ほど前のWindows10ノートPCのWSL(Windows Subsystem for Linux)を使ってUbuntuをインストールし、そこにArdupilotの開発環境を構築しました。Cygwinの情報もありますのでWindows7でもOKだと思います。
後はhwdef.dat、hwdef-bl.datのファイルをICM42688Pに書き換えてビルドしてみました。生成された.HEXファイルをフライトコントローラーに書き込み動作確認をしました。
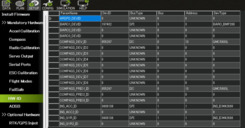
HW IDの画像を添付します。
加速度センサは普通に動作しました。GPS、地磁気センサも動作しています。来週にでもヒコーキに搭載してフライトコーチのユニットとしての動作確認をします。
コメント55〜58及びコメント70にはスーパーキャパシタの話がありますが、これ以外にも、半導体部品には書き込んだ情報が消えてしまうといった現象が稀に起こることがあります。
こうしたことからすると、フライトコーチの様な電子機器は定期的に使用していた方が良いとも言えます。
もし長期保存で異常が出た場合は連絡お願いします。
最終結果
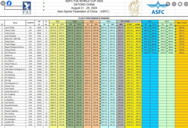
(画像入れ替え)
予選の結果

公式のWebサイトは更新が遅いですが、

facebookに現在までの結果がありました。
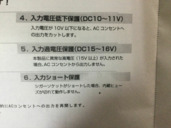
屋外へ持ちだすPCは家に転がっていた10年近く前のノートPC(インテル Core i3 2.4GHz/2コア)を使用しています。もともとはハードディスクでしたがSSDに換装しましたので屋外での取り扱いが雑でもOKです。バッテリーはそれほど劣化していないようなのですが飛行場ではDC-ACインバーターを使用しておます。インバーターの出力は仕様では矩形波となっています。一応PCのAC-DCアダプターをつないで、その出力をオシロで確認しましたが全く問題の無い波形でした。
ちなみに、まだまだ使える4セルのリポが多数あるのですが、満充電時は電圧がDC-ACインバータの許容入力電圧を超えてしまい動作しませんでした。なので間に5Aクラスのダイオードに放熱板を付けて3個直列に入れて電圧を落して使っています。


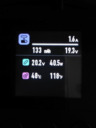
画像は1.6Aで26.3Wと表示されています。この時ダイオードによる電圧降下は2.12Vでした。なのでP=E×I=2.1×1.6≒3.4W をダイオードのところで無駄にエネルギーを消費していることになりますが、ま、いいかと。
Rを描く時のスロットルコントロールについて、特に上昇部分では同じ様に感じています。
参加選手

https://worldcup.hy-f3a.com/list_50/
23日から予選が始まります。
かなり詳しく説明されてますね。
マニュアルは少し分かりづらかったので助かります。
良いですね。
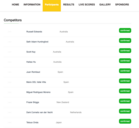
使い方を調べてみました。
https://bluewingclub.com/2024/06/29/
充電と放電をサポートしている小さな充電器(ISDT 608PD)を購入したので

ノートパソコンの電源確保に使ってみました。
TypeCの20V/5Aまで出力できるPD充電ケーブルを持ってたので、


用意したのはHPのノートパソコン専用のDCプラグをTypeCに変換してくれるPD充電アダプタと
リポと608PDを繋ぐための変換ケーブルです。
20.2V/30~40Wぐらいで空になったノートパソコンが約一時間で満充電できました。
リポを繋ぎっぱなしでノートパソコンを使うと過放電の危険性もあるので
ノートパソコンが80%程度充電できたら充電を停止してリポを外す、
20%くらいまでに減ったらリポを繋ぎ充電を開始するという使い方をすれば
ノートパソコンの充放電サイクルを減らすことも出来るのではないかなと思います。
使わなかったバッテリーの放電とノートパソコンの充電が出来るので一石二鳥です。
これからはあの嵩張るACアダプタを持ち歩かなくて済みます。
TDさんのP-25
審査員
8月23日〜25日には中国で
2024 ASFC F3A World CUP Datong,China
が開催されます。
会場と参加国↓

Nabe_RMCさん、テリーさん、hgさん
情報共有ありがとうございます
スペーサの色は関係ないと理解しました
最初に買ったF4 V3S Plus(MPU6500かな)4個購入して2個気圧センサー異常で
販売店を変えて購入したらICM-42688-Pが載ったFCだったと言う次第でした
開発環境を作れば、宣言をするだけで動作hexを作れると思いますが
今後ardupilotがこのFCを対応してくれるまで待とうと思います
次回購入するときはMPU6500を確認して購入したいと思います
よく説明と写真が違っていて実際届くまでわかりませんが(笑)
皆さん、ありがとうございました
以下にネットで集めた情報を記しておきます。
I’ve got a funky “Omnibus F4 V3S PLUS”
https://discuss.ardupilot.org/t/newbie-struggling-with-serial-port-setup/105300/3
Aliexpressでこのボード「Omnibus F4 V3s PLUS」を探している人は、絶対に避けて評判の良い会社から購入することをお勧めします。
そのコントローラーがサポートされているかどうかはわかりません。動作するのは v2 までだと思いますが、100% ではありません。
Omnibus F4 V3S Plus フライトコントロールのサポート
https://github.com/ArduPilot/ardupilot/issues/21684
このボードには、さまざまなセンサーと方向を持つ複数のバリエーションが付属しているため、問題があります。このため、専用のファームウェアを使用することはできないと思います。
OMNIBUS F4 V3S Plus Flight Controller
https://www.rcshopbd.com/product/omnibus-f4-v3s-plus-flight-controller/
F4 V3S Plus Flight controller:
Item name: F4 V3 PLUS Flight Controller
Firmware: OMNIBUSF4SD
Omnibus F4 V3S Plus フライトコントロールのサポート
https://github.com/ArduPilot/ardupilot/issues/21684
このボードには、さまざまなセンサーと方向を持つ複数のバリエーションが付属しているため、問題があります。このため、専用のファームウェアを使用することはできないと思います。
GEPRC Mark 4 Clone Build - 10. Omnibus F4 V3S Plus Betaflight Configuration
https://www.youtube.com/watch?v=bwSmDa9U118
ボードはOMNIBUSF4SDを選択
Omnibus F4 V3S Plus + Mateksys M10Q GPS
https://pic.zawazawa.jp/files/flightcoach/86dc29d5fd7aa.jpg
https://zawazawa.jp/flightcoach/topic/12
きよっさん、テリー さん、情報をありがとうございます。
私も、きよっさんのような所で止まっています。私の方の経緯を以下に記します。
BetaFlightでOMNIBUSF4SD 4.3.2 BTFLを書いたら加速度センサが有効になり
ポート設定をUART6をGPSにして、UART6をGPS/115200、UBLOX、自動設定、衛星支援タイプ-なし でGPSアイコンが有効になりました。なのでFCのボード自体はまともな物であると判断しました。
Betaflight Configulatorでボード情報を見てみると
Devices detected: SPI:2, I2C:0
GYRO=ICM42688P, ACC=ICM42688P, BARO=BMP280
だったのでardupilot-masterのフォルダを"ICM42688P"でGrepしたところhwdef.datで出てて来るのは以下のボードだけでした。
\ARK_CANNODE\hwdef.dat(85,18) [UTF-8]: # SPI1 FSYNC for ICM42688p
\ARK_GPS\hwdef.dat(84,18) [UTF-8]: # SPI1 FSYNC for ICM42688p
\ARK_RTK_GPS\hwdef.dat(88,18) [UTF-8]: # SPI1 FSYNC for ICM42688p
\JHEMCU-H743HD\hwdef.dat(164,8) [UTF-8]: SPIDEV icm42688p SPI1 DEVID1 GYRO1_CS MODE3 1MHZ 8MHZ
\JHEMCU-H743HD\hwdef.dat(165,22) [UTF-8]: IMU Invensensev3 SPI:icm42688p ROTATION_PITCH_180
\JHEMCU-H743HD\hwdef.dat(167,8) [UTF-8]: SPIDEV icm42688p2 SPI4 DEVID2 GYRO2_CS MODE3 1MHZ 8MHZ
\JHEMCU-H743HD\hwdef.dat(168,22) [UTF-8]: IMU Invensensev3 SPI:icm42688p2 ROTATION_ROLL_180
\LongBowF405WING\hwdef.dat(152,3) [UTF-8]: # ICM42688P on SPI1
\MatekH743\hwdef.dat(206,17) [UTF-8]: # H743-V3, ICM42688P, ICM42605
\MatekH7A3\hwdef.dat(39,12) [UTF-8]: # SPI1 for ICM42688P & MAX7456
\MatekH7A3\hwdef.dat(142,27) [UTF-8]: # ------------------- IMU ICM42688p ------------------
\Sierra-PrecisionPoint\hwdef.dat(70,18) [UTF-8]: # SPI1 FSYNC for ICM42688p
\SpeedyBeeF405WING\hwdef.dat(151,3) [UTF-8]: # ICM42688P on SPI1
>V3.1(スペーサが赤い)からジャイロがMPU6000からICM42688に変更され
VLVのスペーサも赤いものだったのですが、私の購入した物とVLVの物をよく見比べてみると違いがありました。
画像を添付します。
▼MP65
BOM Electronic Components IC Chips IMU ACCEL/GYRO 3-AXIS I2C 24QFN MPU-6500 MPU6500 MP65
https://www.alibaba.com/product-detail/BOM-Electronic-Components-IC-Chips-IMU_1600258104404.html
▼I428P
6軸ジャイロスコープICM-42688-P i428p 1428 smd LGA-14 icm42688,高精度,3軸
https://ja.aliexpress.com/item/1005005776061706.html
というわけで自分でビルドすればよくArdupilotのwebサイトにそのための情報もありますが
Building the code
https://ardupilot.org/dev/docs/building-the-code.html
Linuxが直ぐ動くマシンが無く、他にやりたいことが多々あり、このだめだけにWSL(Windows Subsystem for Linux)をセットアップするのも面倒です。
FCのボードは他にOmniBus F4 V3も手元にあるため、VLVのユニットの修理はそちらで行おうかと思っています。
皆様 はじめまして。
私も同様にF4V3.1SPLUSで困っています。静電防止袋にF4V3.1SPLUSと記載あり(GPSはBE-880)
omnibusf4 v4.5.4 ファームでは以下のエラーが出ます。
2024/08/01 23:09:39 : Config Error: fix problem then reboot
2024/08/01 23:09:34 : Config Error: INS: unable to initialise driver
2024/08/01 23:09:34 : Config Error: fix problem then reboot
2024/08/01 23:09:33 : RCOut: Initialising
2024/08/01 23:09:33 : omnibusf4 00570033 33335106 32393735
2024/08/01 23:09:33 : ChibiOS: 6a85082c
2024/08/01 23:09:33 : ArduPlane V4.5.4 (e8f937aa)
きよっさんの試されたBETAFPV-F405では上記のエラーは消えましたがgpsstatus 0 GPSを認識しないみたいです。GPSの232CはFCのT6/R6への接続で良いのでしょうか?
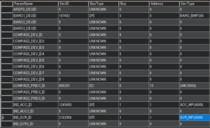
HWIDはきよっさんと全く同じです。何か情報があれば共有お願いします。
GPSですがシリアルポートの機能をGPSに選択するだけで動作したと思います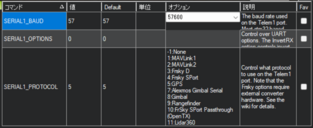
ボーレートは自動認識されるようでどのボーレートでも関係ありませんでした
Nabe_RMCさんの写真を拝見すると、
T6R6を使用されているようなのでシリアル6を変えれば良いでしょうか
私は、T1R1に接続しているので シリアル1でした
Nabe_RMCさん はじめまして
わたしも同様に苦しんでいます
購入されたのはBetaflightのFCでしょうか
BetaflightのF4 V3S Plus ですがバージョンがあって V3.0(スペーサが青い)まではomnibusF4コンパチだったのでomnibusF4で動作していますが
V3.1(スペーサが赤い)からジャイロがMPU6000からICM42688に変更されomnibusF4では動作しなくなりました
色々なファームをテストしましたが、少し動作したのがBETAFPV-F405でした
しかしながら、コンパスが動作せず頓挫しています
以前はジャイロが動作していたということは、最新の4.5.0 ではICM42688を外されてしまったのかもしれません
やはりカスタムビルドしないといけないようですね、一度チャレンジしてみます
情報共有よろしくお願いします
V3S
2024/08/05 13:02:20 : omnibusf4 004D0039 324D5014 20313256
2024/08/05 13:02:20 : ChibiOS: 6a85082c
2024/08/05 13:02:20 : ArduPlane V4.5.4 (e8f937aa)
ジャイロ MPU6000
気圧センサー BMP280
V3.1S
2024/08/05 13:05:10 : BETAFPV-F405 002B001F 33335102 32393735
2024/08/05 13:05:10 : ChibiOS: 6a85082c
2024/08/05 13:05:10 : ArduPlane V4.5.0 (233f344a)
ジャイロ ICM42688
気圧センサー BMP280
NATS最終結果
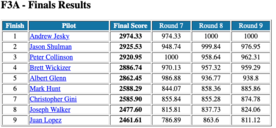
7月30日〜8月2日には、アメリカのインディアナ州で

NATS 2024(National Aeromodeling Champion Ships)という大会が行われています。
セミファイナルまでの結果
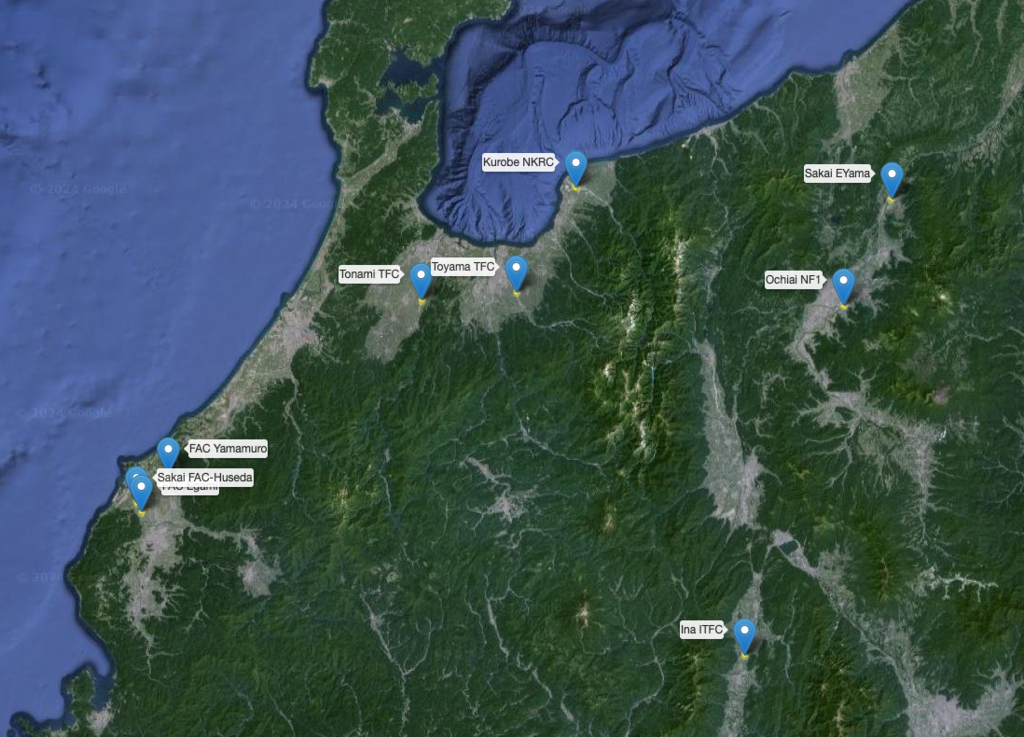
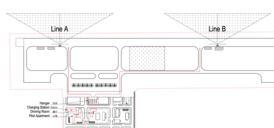
会場となったAMA International Aeromodeling Center (IAC)は、フライトコーチのエリアが3箇所も登録されている広大な所です。

現在の中部地方