
壊れたフライトコーチのモジュールを修理すべく
使用されているのと同じフライトコントローラーを購入しました。

ArduPilot firmware _ _Planeのサイトで
https://firmware.ardupilot.org/Plane/
このボードに対応するfirmwareをご存じの方がいたら教えていただけないでしょうか?
現時点でのstableのomnibusf4、omunibusf4pro、omnibus4v6は書き込んでみたのですがミッションプランナーを接続すると加速度センサーが機能していないのが確認できました。
このショップの情報では
OMNIBUS F4 V3S Plus Flight Controller
https://www.rcshopbd.com/product/omnibus-f4-v3s-plus-flight-controller/
Firmware: OMNIBUSF4SD
となっていましたのでBetaflight ConfiguratorでOMNIBUSF4SD 4.3.2を書き込み確認したら加速度センサもGPSインタフェースも正しく機能しました。ちなみに最新の4.5.0 では "加速度センサが検出されませんでした" と表示されます。
ここでの情報では
Support for Omnibus F4 V3S Plus Flight Control
https://github.com/ArduPilot/ardupilot/issues/21684
>このボードには、さまざまなセンサーと方向を持つ複数のバリエーションが付属しているため、問題があります。このため、専用のファームウェアを使用することはできないと思います。
とあるため購入したボードに合わせてビルドしなければならないのでしょうか?
[SOLVED] Omnibus F4 Pro GPS on UART3 not working. Hardware is fine
https://discuss.ardupilot.org/t/solved-omnibus-f4-pro-gps-on-uart3-not-working-hardware-is-fine/31337
>Omnibus F4 V3 以降では UART6 にハードウェア インバータが搭載されました
これを上書きしてGPS UART ポートとして使用します
PC8 SBUS_INVERT_RX OUTPUT LOW
PC9 SBUS_INVERT_TX OUTPUT LOW
ですがV6のhwdef.dataでは既にコメントアウトされていたりします。
ここ一週間ほどでドライバを書き直したりを含めますと30回ぐらいは書き直しているのですが、未だに正解に辿り着けていません。
よろしくお願いします。
正常に動作するFCをお持ちでしたら、STM32CubeProgrammerでメモリ内容を読みだして binファイルに書き出し。
該当FCに書き込みするっていうアイデアはいかがでしょうか
対応方法のご提案をありがとうございます。
残念ながらもとのFCは電源周りが焼けてしまったので動作しません。マイコンチップ自体も逆電圧、過電圧などがかかって壊れているかもしれません。
新品のFCはそれなりの価格がしますので
https://morris-hobby.securesite.jp/97_2170.html
このためだけに購入するのもイマイチでして。ですが栃木の知り合いが同じ物を使っていますので、今度出かけた時にメモリ内容を読みださせてもらおうと思います。
ありがとうございました。
Nabe_RMCさん はじめまして
わたしも同様に苦しんでいます
購入されたのはBetaflightのFCでしょうか
BetaflightのF4 V3S Plus ですがバージョンがあって V3.0(スペーサが青い)まではomnibusF4コンパチだったのでomnibusF4で動作していますが
V3.1(スペーサが赤い)からジャイロがMPU6000からICM42688に変更されomnibusF4では動作しなくなりました
色々なファームをテストしましたが、少し動作したのがBETAFPV-F405でした
しかしながら、コンパスが動作せず頓挫しています
以前はジャイロが動作していたということは、最新の4.5.0 ではICM42688を外されてしまったのかもしれません
やはりカスタムビルドしないといけないようですね、一度チャレンジしてみます
情報共有よろしくお願いします
V3S
2024/08/05 13:02:20 : omnibusf4 004D0039 324D5014 20313256
2024/08/05 13:02:20 : ChibiOS: 6a85082c
2024/08/05 13:02:20 : ArduPlane V4.5.4 (e8f937aa)
ジャイロ MPU6000
気圧センサー BMP280
V3.1S
2024/08/05 13:05:10 : BETAFPV-F405 002B001F 33335102 32393735
2024/08/05 13:05:10 : ChibiOS: 6a85082c
2024/08/05 13:05:10 : ArduPlane V4.5.0 (233f344a)
ジャイロ ICM42688
気圧センサー BMP280
GPSですがシリアルポートの機能をGPSに選択するだけで動作したと思います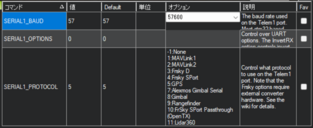
ボーレートは自動認識されるようでどのボーレートでも関係ありませんでした
Nabe_RMCさんの写真を拝見すると、
T6R6を使用されているようなのでシリアル6を変えれば良いでしょうか
私は、T1R1に接続しているので シリアル1でした
皆様 はじめまして。
私も同様にF4V3.1SPLUSで困っています。静電防止袋にF4V3.1SPLUSと記載あり(GPSはBE-880)
omnibusf4 v4.5.4 ファームでは以下のエラーが出ます。
2024/08/01 23:09:39 : Config Error: fix problem then reboot
2024/08/01 23:09:34 : Config Error: INS: unable to initialise driver
2024/08/01 23:09:34 : Config Error: fix problem then reboot
2024/08/01 23:09:33 : RCOut: Initialising
2024/08/01 23:09:33 : omnibusf4 00570033 33335106 32393735
2024/08/01 23:09:33 : ChibiOS: 6a85082c
2024/08/01 23:09:33 : ArduPlane V4.5.4 (e8f937aa)
きよっさんの試されたBETAFPV-F405では上記のエラーは消えましたがgpsstatus 0 GPSを認識しないみたいです。GPSの232CはFCのT6/R6への接続で良いのでしょうか?
HWIDはきよっさんと全く同じです。何か情報があれば共有お願いします。
きよっさん、テリー さん、情報をありがとうございます。
私も、きよっさんのような所で止まっています。私の方の経緯を以下に記します。
BetaFlightでOMNIBUSF4SD 4.3.2 BTFLを書いたら加速度センサが有効になり
ポート設定をUART6をGPSにして、UART6をGPS/115200、UBLOX、自動設定、衛星支援タイプ-なし でGPSアイコンが有効になりました。なのでFCのボード自体はまともな物であると判断しました。
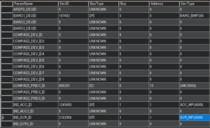
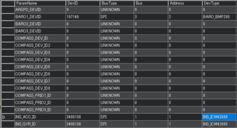
Betaflight Configulatorでボード情報を見てみると
Devices detected: SPI:2, I2C:0
GYRO=ICM42688P, ACC=ICM42688P, BARO=BMP280
だったのでardupilot-masterのフォルダを"ICM42688P"でGrepしたところhwdef.datで出てて来るのは以下のボードだけでした。
\ARK_CANNODE\hwdef.dat(85,18) [UTF-8]: # SPI1 FSYNC for ICM42688p
\ARK_GPS\hwdef.dat(84,18) [UTF-8]: # SPI1 FSYNC for ICM42688p
\ARK_RTK_GPS\hwdef.dat(88,18) [UTF-8]: # SPI1 FSYNC for ICM42688p
\JHEMCU-H743HD\hwdef.dat(164,8) [UTF-8]: SPIDEV icm42688p SPI1 DEVID1 GYRO1_CS MODE3 1MHZ 8MHZ
\JHEMCU-H743HD\hwdef.dat(165,22) [UTF-8]: IMU Invensensev3 SPI:icm42688p ROTATION_PITCH_180
\JHEMCU-H743HD\hwdef.dat(167,8) [UTF-8]: SPIDEV icm42688p2 SPI4 DEVID2 GYRO2_CS MODE3 1MHZ 8MHZ
\JHEMCU-H743HD\hwdef.dat(168,22) [UTF-8]: IMU Invensensev3 SPI:icm42688p2 ROTATION_ROLL_180
\LongBowF405WING\hwdef.dat(152,3) [UTF-8]: # ICM42688P on SPI1
\MatekH743\hwdef.dat(206,17) [UTF-8]: # H743-V3, ICM42688P, ICM42605
\MatekH7A3\hwdef.dat(39,12) [UTF-8]: # SPI1 for ICM42688P & MAX7456
\MatekH7A3\hwdef.dat(142,27) [UTF-8]: # ------------------- IMU ICM42688p ------------------
\Sierra-PrecisionPoint\hwdef.dat(70,18) [UTF-8]: # SPI1 FSYNC for ICM42688p
\SpeedyBeeF405WING\hwdef.dat(151,3) [UTF-8]: # ICM42688P on SPI1
>V3.1(スペーサが赤い)からジャイロがMPU6000からICM42688に変更され
VLVのスペーサも赤いものだったのですが、私の購入した物とVLVの物をよく見比べてみると違いがありました。
画像を添付します。
▼MP65
BOM Electronic Components IC Chips IMU ACCEL/GYRO 3-AXIS I2C 24QFN MPU-6500 MPU6500 MP65
https://www.alibaba.com/product-detail/BOM-Electronic-Components-IC-Chips-IMU_1600258104404.html
▼I428P
6軸ジャイロスコープICM-42688-P i428p 1428 smd LGA-14 icm42688,高精度,3軸
https://ja.aliexpress.com/item/1005005776061706.html
というわけで自分でビルドすればよくArdupilotのwebサイトにそのための情報もありますが
Building the code
https://ardupilot.org/dev/docs/building-the-code.html
Linuxが直ぐ動くマシンが無く、他にやりたいことが多々あり、このだめだけにWSL(Windows Subsystem for Linux)をセットアップするのも面倒です。
FCのボードは他にOmniBus F4 V3も手元にあるため、VLVのユニットの修理はそちらで行おうかと思っています。
以下にネットで集めた情報を記しておきます。
I’ve got a funky “Omnibus F4 V3S PLUS”
https://discuss.ardupilot.org/t/newbie-struggling-with-serial-port-setup/105300/3
Aliexpressでこのボード「Omnibus F4 V3s PLUS」を探している人は、絶対に避けて評判の良い会社から購入することをお勧めします。
そのコントローラーがサポートされているかどうかはわかりません。動作するのは v2 までだと思いますが、100% ではありません。
Omnibus F4 V3S Plus フライトコントロールのサポート
https://github.com/ArduPilot/ardupilot/issues/21684
このボードには、さまざまなセンサーと方向を持つ複数のバリエーションが付属しているため、問題があります。このため、専用のファームウェアを使用することはできないと思います。
OMNIBUS F4 V3S Plus Flight Controller
https://www.rcshopbd.com/product/omnibus-f4-v3s-plus-flight-controller/
F4 V3S Plus Flight controller:
Item name: F4 V3 PLUS Flight Controller
Firmware: OMNIBUSF4SD
Omnibus F4 V3S Plus フライトコントロールのサポート
https://github.com/ArduPilot/ardupilot/issues/21684
このボードには、さまざまなセンサーと方向を持つ複数のバリエーションが付属しているため、問題があります。このため、専用のファームウェアを使用することはできないと思います。
GEPRC Mark 4 Clone Build - 10. Omnibus F4 V3S Plus Betaflight Configuration
https://www.youtube.com/watch?v=bwSmDa9U118
ボードはOMNIBUSF4SDを選択
Omnibus F4 V3S Plus + Mateksys M10Q GPS
https://pic.zawazawa.jp/files/flightcoach/86dc29d5fd7aa.jpg
https://zawazawa.jp/flightcoach/topic/12
Nabe_RMCさん、テリーさん、hgさん
情報共有ありがとうございます
スペーサの色は関係ないと理解しました
最初に買ったF4 V3S Plus(MPU6500かな)4個購入して2個気圧センサー異常で
販売店を変えて購入したらICM-42688-Pが載ったFCだったと言う次第でした
開発環境を作れば、宣言をするだけで動作hexを作れると思いますが
今後ardupilotがこのFCを対応してくれるまで待とうと思います
次回購入するときはMPU6500を確認して購入したいと思います
よく説明と写真が違っていて実際届くまでわかりませんが(笑)
皆さん、ありがとうございました
開発環境を構築し、.HEXファイルを作成することができました。
ここまでのポイントを以下に天気します。
>Omnibus F4 V3S Plus フライトコントロールのサポート
https://github.com/ArduPilot/ardupilot/issues/21684
>このボードには、さまざまなセンサーと方向を持つ複数のバリエーションが付属しているため、問題があります。このため、>専用のファームウェアを使用することはできないと思います。
>Betaflight Configulatorでボード情報を見てみると
>GYRO=ICM42688P, ACC=ICM42688P, BARO=BMP280
>だったのでardupilot-masterのフォルダを"ICM42688P"でGrepしたところhwdef.datで出てて来るのは以下のボードだけでした。
>というわけで自分でビルドすればよくArdupilotのwebサイトにそのための情報もありますが
>Building the code
https://ardupilot.org/dev/docs/building-the-code.html
なので10年ほど前のWindows10ノートPCのWSL(Windows Subsystem for Linux)を使ってUbuntuをインストールし、そこにArdupilotの開発環境を構築しました。Cygwinの情報もありますのでWindows7でもOKだと思います。
後はhwdef.dat、hwdef-bl.datのファイルをICM42688Pに書き換えてビルドしてみました。生成された.HEXファイルをフライトコントローラーに書き込み動作確認をしました。
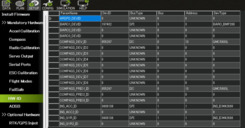
HW IDの画像を添付します。
加速度センサは普通に動作しました。GPS、地磁気センサも動作しています。来週にでもヒコーキに搭載してフライトコーチのユニットとしての動作確認をします。