---スマホでフライトコーチ---
スマホを新しいものに変えたので、フライトコーチを試してみました。
まず最初に必要なものは、コネクタータイプが適合した「SDカードリーダー」で、 スマホのブラウザの方にはプロッターをブックマーク保存しておきます。
準備が整ったら、実際に使う場面では、保存済みリストからプロッターを呼び出し、 スマホ本体には飛行データの入ったマイクロSDカードを接続します。
プロッター画面の「Load BIN」を押し、
メディアの選択でUSBドライブを指定して、その中から見たいフライトのBINファイルを選びます。 APM>LOGS>※※.BIN、の順に進みます。 コネクタの接触が悪いとUSBドライブが検出されないことがあります。
補助画面が出ますが、登録飛行場の場合は自動的に飛行場データが入っているので、演技名を選んでからSubmitを押します。
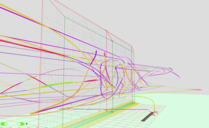
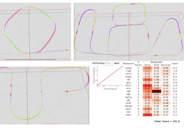
すると、こんな感じで3Dリボン図が再現されます。
未登録飛行場の場合は飛行場の緯度経度の入力が必要ですが、不完全でもいいから取り敢えずデータの確認をしたい時には、「manual」を選んでから「Copy Origin」を押すという方法もあります。→コメント41
---それと、終了時のSDカードの取り外しは次の手順で行います---
(スマホ本体の)設定項目 ↓ 全てを見る ↓ ストレージ ↓ ページ一番上の「このデバイス」>USBドライブ ↓ 右上の「メニュー」>取り出し
(2024.7.6追記) もっと簡単な取り外し方法がありました。 上記中程の「メディアの選択」の画面に、USBドライブの取り外しマークがあります。
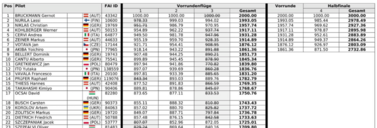
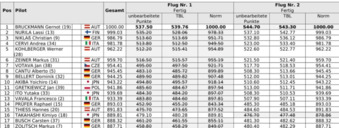
2024年7月6日(土) 〜7日(日) F3Aワールドカップ リヒテンシュタイン2024 参加者 56th F3A World Cup Liechtenstein 2024
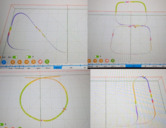
データが上手く取れなかったユーザさんの例。
色々調べてみたところ、不調の原因は待機時間にありました。 フライト開始の条件としては、「GPSのLEDの点滅開始」が大切です。 コントローラー側のLED点灯ではありません。
「点滅」を確認してからフライトさせると、通常通りの結果が得られました。
旧タイプのユニットの中には、コールドスタートや再フライトでのGPSロックに10~20分かかるものもあります。 その場合は、マイクロSDカードを入れずにフライト開始のかなり前から通電しておき、飛行する時に電源を入れ直してその時にカードをセットすると良いでしょう。
通常通りのデータは得られましたが、良く見ると、この掲示板でもしばしば話題になった航跡のジャンプが見られます。 特に、背面や、背面から垂直になった姿勢で目立ちます。
これは、当時のGPSモジュールの性能としては仕方ない所でもあり、現在では新しい世代のものに変わっているのです。
尚、以前旧タイプのユニットを購入されたユーザさんには、前と同じ価格で新しいタイプを販売することにします。 ご検討ください。
参加は1人だけだったそうです。 Joywu.json
ドイツのRegensburg(レーゲンスブルク)の動画がありました。 https://www.br.de/br-fernsehen/sendungen/abendschau/abendschau-modelflug-100.html?fbclid=IwZXh0bgNhZW0CMTAAAR0lMSf2PII1BRYJhm4BBiE7ivEg1lMAQhfAayvYGvO_RREebqQY1jis_fo_aem_OGGDsVYsJTqracKQqKFJuA
オランダの最終結果。 https://www.lowlandcup.com/final-results-f3a-lowland-cup-2024/
初日の2ラウンドの結果。 https://www.lowlandcup.com/results-after-two-rounds/
飛行順が発表されています。 https://www.lowlandcup.com/f3a-lowland-cup-2024-startorder/
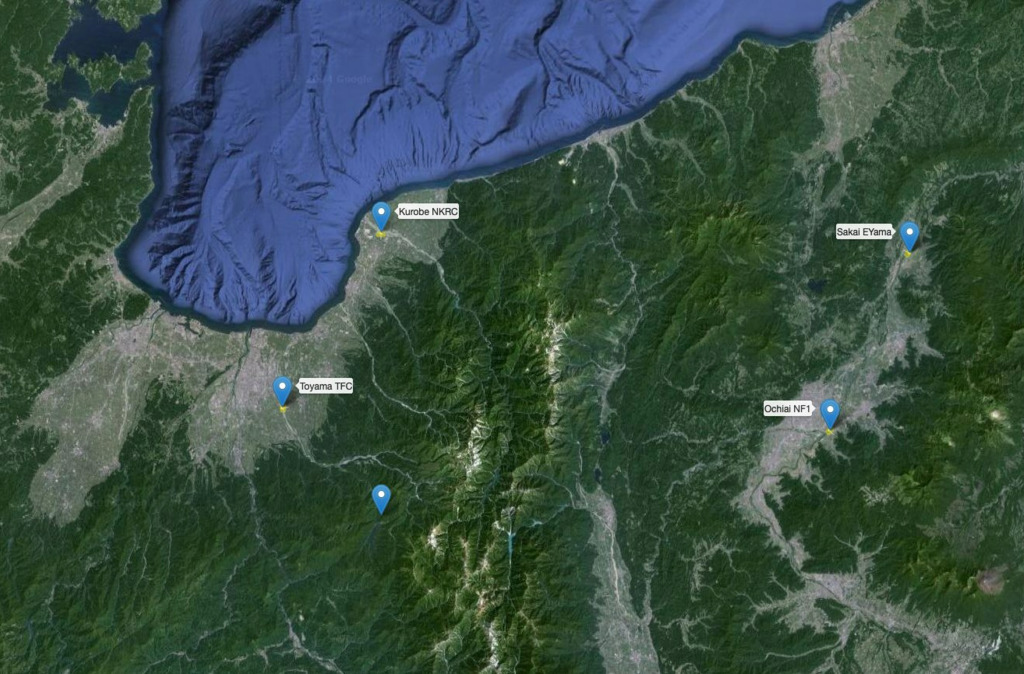
最近、福井県で登録がありました。
フランス大会の写真 World Cup F3A Reyrieux 22-23 Juin 2024
6月29〜30日にはオランダで 「F3A LOWLAND CUP 2024」が開催されます。 https://www.lowlandcup.com/10th-f3a-lowland-cup-2024/ 参加選手
トラブル事例と対策方法のご提示をありがとうございます。 私も老眼で手元が見えません。いつも電源線の黒の線の位置を合わせながら挿入しているつもりなのですが、なぜか逆に挿しかけることもありました。なので私も早速、赤のマジックでグリグリと色を塗りました。 これでも間違えそうな場合は、配線に逆接保護のダイオードでも入れようかと思いますが、そこまでボケてきたら免許返納ですかね。😄
類似トラブルをご紹介(お恥ずかしい話ですが)
Omnibus F4の電源を動力LiPoのバランス端子からとってます バランス端子は逆接続できないようにキー形状となってます
老眼で手元がぼんやりしか見えず、逆方向に気が付かず力を入れたら端子が瞬間接触した様子 気がついて、正規の方向にて接続したら少しの間 動作した後 電源ICが焼損
逆電圧が加わったダメージが発端でした コネクタをやや斜めに押し込もうとすると、一部端子接触しますね
以降、コネクタの片面に色をつけて ぼんやりしか見えなくても方向を間違わないようにしました
フランス大会の結果 準決勝↓ 決勝↓
スポーツマン演技の動画がアップされました。
フランスのリヨン近郊での大会が始まります。
トライアングルの「45度ラインのロール」では似た様な動きになります。
リンク集に更新を記載しましたが、フライトコーチを使った練習はドンピシャの内容なので、ここにもリンクしておきます。
きよっさんのブログ「いつまでもアドバンスド」 フライトコーチで練習 ①
「Tonami TFC」も修正が完了していました。
P-27やF-27を見つけ易くするため、トピック冒頭部分を更新。
本大会主催のMBP JAPAN代表 小池庫司さんですが、先週ご逝去され、葬儀もすでに執り行われた様です。 謹んで哀悼の意を表します。
(関係するサイトに情報はありません) MBP JAPAN http://www.mbpjapan.net
MBP JAPAN ラジコンクラブ https://www.mbp-japan-rc.com
6月22~23日にはフランスで開催されます。 https://www.macb.fr/f3a-world-cup-2024 参加選手 ジャッジの中には日本人も
チェコの結果が出た様です。 得点をクリックするとジャッジ毎の点数が見られます。 https://svazmodelaru.cz/klem/F3A/results.html
チェック方法の参考に
「Kurobe NKRC」の修正が完了していました。
6月14~16日には、「South-Moravian Cup F3A 2024」というワールドカップ大会が、チェコで行われています。
主催クラブ http://www.minfo.cz/f3a/index.php
Online成績表 https://svazmodelaru.cz/klem/F3A/results.html
機影が小さくて見辛いので、あまり参考になりませんが、一応記録として。
6月9日にカシオペアの大会が京都の鬼の里で開催され、オートパイロットによるフライトも行われました。 mamuさんのブログに感想があります。 i-RCTechのブログ
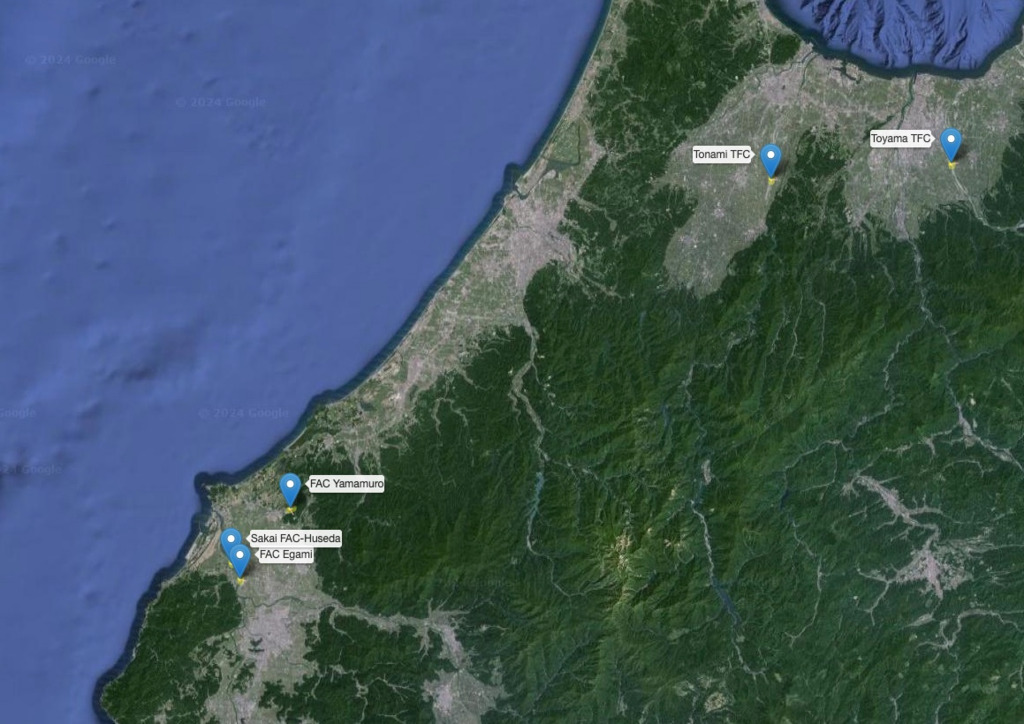
「Tonami TFC」が登録されました。 ただ、センターの角度に少しズレがある様です。
センターの位置は角度が重要なので、パイロット位置からなるべく離れた所に設定すると良いでしょう。 何百メートル離れていても大丈夫です。
フライトエリアの確認方法は、カスタムサイトにあります。 実際にはFCMapの右上にあるボタンをクリックして始めます。
「Kurobe NKRC」の登録がありましたが、センターの緯度経度が間違っていますね。
オーストリア大会の結果 https://www.facebook.com/umfsschaerding
P-25パターン 色々な視点から見比べます。
2ラウンド終了 フェイスブック https://www.facebook.com/umfsschaerding/?ref=embed_page は、ログインしなくても見られると思います。
主催クラブ https://www.modellflug-schaerding.at フェイスブック https://www.facebook.com/umfsschaerding/?ref=embed_page
選手 https://www.facebook.com/yutaka.ito.165470 https://www.facebook.com/kimiyo.takahashi.161 https://www.facebook.com/christian.niklass
1ラウンド終了
私が一番驚いているのは競技エリアのレイアウトで、クラブハウス側の上空を飛行します。 クラブハウス側から撮られた写真。 まぁ、主な飛行コースの下は問題無さそうですが。
オーストリアでの大会が始まった様です。 https://www.facebook.com/yutaka.ito.165470 https://www.facebook.com/kimiyo.takahashi.161
TakJPさんが手ぶれ補正の動画を作ってアップしてくれました。 機体の姿勢がよく分かって面白いですね。 以前は、YouTubeの付属機能にスタビライズ加工があって手ぶれ補正が簡単に行えたのですが、それが消えてしまってから動画の利用が少なくなっていました。 調べてみると、手ぶれ補正のソフトもある様なので、そういうものを使ってみるのも良さそうです。
TDさんのF-25。 風の中だそうです。
こちらは全く別の人のF-25。 これも上手です。
2機同時飛行を 将来トライしてみたいですが、どうやるのか よくわからない 以下のYoutube 3:52辺りで説明されてますが…うーん🤔
メッシュネットワークを構築して同期させているのと、既に仕組みは組み込まれている様子 零戦でシンクロ飛行したら デモ飛行としては最高のものになるのではないかと妄想しています
https://www.youtube.com/live/8yXhSpkEKkY?si=kZSXoViLo9wJB6nW

---スマホでフライトコーチ---
スマホを新しいものに変えたので、フライトコーチを試してみました。
まず最初に必要なものは、コネクタータイプが適合した「SDカードリーダー」で、

スマホのブラウザの方にはプロッターをブックマーク保存しておきます。
準備が整ったら、実際に使う場面では、保存済みリストからプロッターを呼び出し、

スマホ本体には飛行データの入ったマイクロSDカードを接続します。
プロッター画面の「Load BIN」を押し、

メディアの選択でUSBドライブを指定して、その中から見たいフライトのBINファイルを選びます。

APM>LOGS>※※.BIN、の順に進みます。
コネクタの接触が悪いとUSBドライブが検出されないことがあります。
補助画面が出ますが、登録飛行場の場合は自動的に飛行場データが入っているので、演技名を選んでからSubmitを押します。

すると、こんな感じで3Dリボン図が再現されます。

未登録飛行場の場合は飛行場の緯度経度の入力が必要ですが、不完全でもいいから取り敢えずデータの確認をしたい時には、「manual」を選んでから「Copy Origin」を押すという方法もあります。→コメント41

---それと、終了時のSDカードの取り外しは次の手順で行います---
(スマホ本体の)設定項目

↓
全てを見る
↓
ストレージ
↓
ページ一番上の「このデバイス」>USBドライブ
↓
右上の「メニュー」>取り出し
(2024.7.6追記)

もっと簡単な取り外し方法がありました。
上記中程の「メディアの選択」の画面に、USBドライブの取り外しマークがあります。
2024年7月6日(土) 〜7日(日)
F3Aワールドカップ リヒテンシュタイン2024
参加者
56th F3A World Cup Liechtenstein 2024
データが上手く取れなかったユーザさんの例。
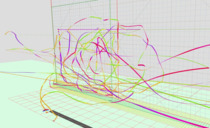
色々調べてみたところ、不調の原因は待機時間にありました。

フライト開始の条件としては、「GPSのLEDの点滅開始」が大切です。
コントローラー側のLED点灯ではありません。
「点滅」を確認してからフライトさせると、通常通りの結果が得られました。
旧タイプのユニットの中には、コールドスタートや再フライトでのGPSロックに10~20分かかるものもあります。
その場合は、マイクロSDカードを入れずにフライト開始のかなり前から通電しておき、飛行する時に電源を入れ直してその時にカードをセットすると良いでしょう。
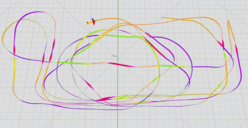
通常通りのデータは得られましたが、良く見ると、この掲示板でもしばしば話題になった航跡のジャンプが見られます。
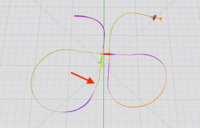
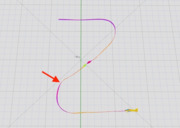
特に、背面や、背面から垂直になった姿勢で目立ちます。
これは、当時のGPSモジュールの性能としては仕方ない所でもあり、現在では新しい世代のものに変わっているのです。
尚、以前旧タイプのユニットを購入されたユーザさんには、前と同じ価格で新しいタイプを販売することにします。
ご検討ください。
参加は1人だけだったそうです。
Joywu.json
ドイツのRegensburg(レーゲンスブルク)の動画がありました。
https://www.br.de/br-fernsehen/sendungen/abendschau/abendschau-modelflug-100.html?fbclid=IwZXh0bgNhZW0CMTAAAR0lMSf2PII1BRYJhm4BBiE7ivEg1lMAQhfAayvYGvO_RREebqQY1jis_fo_aem_OGGDsVYsJTqracKQqKFJuA
オランダの最終結果。

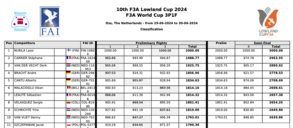
https://www.lowlandcup.com/final-results-f3a-lowland-cup-2024/
初日の2ラウンドの結果。

https://www.lowlandcup.com/results-after-two-rounds/
飛行順が発表されています。
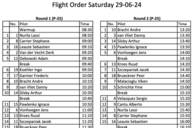
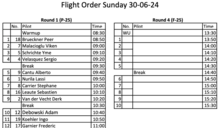
https://www.lowlandcup.com/f3a-lowland-cup-2024-startorder/
最近、福井県で登録がありました。
フランス大会の写真

World Cup F3A Reyrieux 22-23 Juin 2024
6月29〜30日にはオランダで 「F3A LOWLAND CUP 2024」が開催されます。

https://www.lowlandcup.com/10th-f3a-lowland-cup-2024/
参加選手
トラブル事例と対策方法のご提示をありがとうございます。
私も老眼で手元が見えません。いつも電源線の黒の線の位置を合わせながら挿入しているつもりなのですが、なぜか逆に挿しかけることもありました。なので私も早速、赤のマジックでグリグリと色を塗りました。
これでも間違えそうな場合は、配線に逆接保護のダイオードでも入れようかと思いますが、そこまでボケてきたら免許返納ですかね。😄
類似トラブルをご紹介(お恥ずかしい話ですが)
Omnibus F4の電源を動力LiPoのバランス端子からとってます
バランス端子は逆接続できないようにキー形状となってます
老眼で手元がぼんやりしか見えず、逆方向に気が付かず力を入れたら端子が瞬間接触した様子
気がついて、正規の方向にて接続したら少しの間 動作した後 電源ICが焼損
逆電圧が加わったダメージが発端でした
コネクタをやや斜めに押し込もうとすると、一部端子接触しますね
以降、コネクタの片面に色をつけて ぼんやりしか見えなくても方向を間違わないようにしました
フランス大会の結果

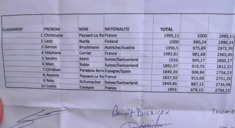

準決勝↓
決勝↓
スポーツマン演技の動画がアップされました。
フランスのリヨン近郊での大会が始まります。


トライアングルの「45度ラインのロール」では似た様な動きになります。
リンク集に更新を記載しましたが、フライトコーチを使った練習はドンピシャの内容なので、ここにもリンクしておきます。
きよっさんのブログ「いつまでもアドバンスド」
フライトコーチで練習 ①
「Tonami TFC」も修正が完了していました。

P-27やF-27を見つけ易くするため、トピック冒頭部分を更新。
本大会主催のMBP JAPAN代表 小池庫司さんですが、先週ご逝去され、葬儀もすでに執り行われた様です。
謹んで哀悼の意を表します。
(関係するサイトに情報はありません)
MBP JAPAN
http://www.mbpjapan.net
MBP JAPAN ラジコンクラブ
https://www.mbp-japan-rc.com
6月22~23日にはフランスで開催されます。


https://www.macb.fr/f3a-world-cup-2024
参加選手
ジャッジの中には日本人も
チェコの結果が出た様です。
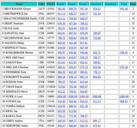
得点をクリックするとジャッジ毎の点数が見られます。
https://svazmodelaru.cz/klem/F3A/results.html
チェック方法の参考に
「Kurobe NKRC」の修正が完了していました。

6月14~16日には、「South-Moravian Cup F3A 2024」というワールドカップ大会が、チェコで行われています。
主催クラブ
http://www.minfo.cz/f3a/index.php
Online成績表
https://svazmodelaru.cz/klem/F3A/results.html
機影が小さくて見辛いので、あまり参考になりませんが、一応記録として。
6月9日にカシオペアの大会が京都の鬼の里で開催され、オートパイロットによるフライトも行われました。
mamuさんのブログに感想があります。
i-RCTechのブログ
「Tonami TFC」が登録されました。
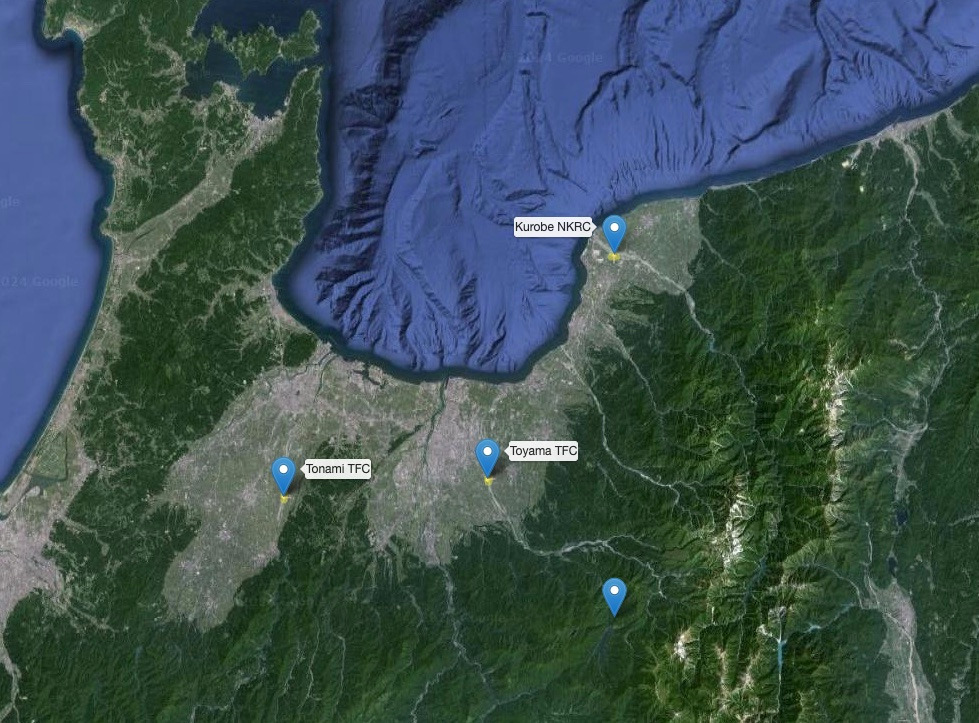
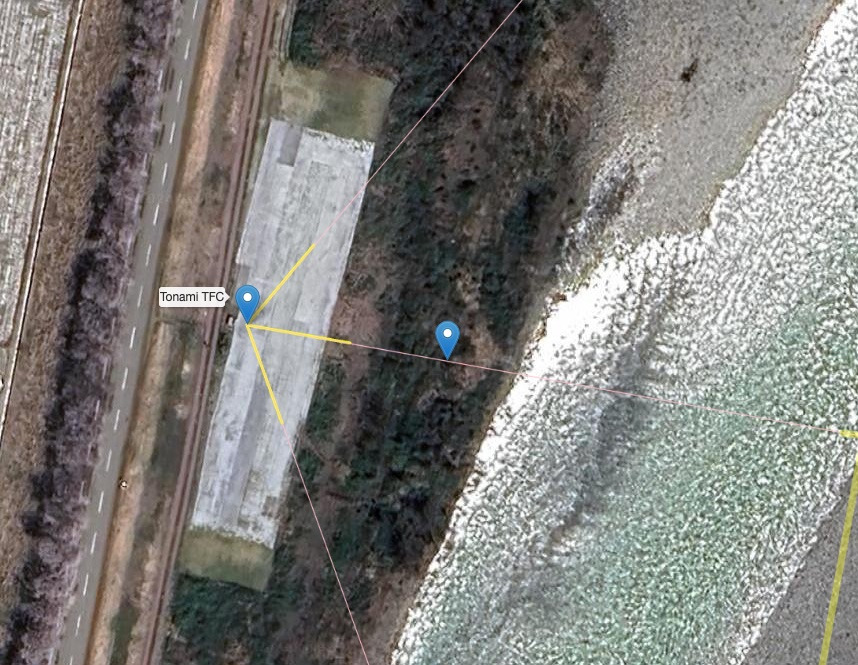
ただ、センターの角度に少しズレがある様です。
センターの位置は角度が重要なので、パイロット位置からなるべく離れた所に設定すると良いでしょう。
何百メートル離れていても大丈夫です。
フライトエリアの確認方法は、カスタムサイトにあります。
実際にはFCMapの右上にあるボタンをクリックして始めます。
「Kurobe NKRC」の登録がありましたが、センターの緯度経度が間違っていますね。

オーストリア大会の結果

https://www.facebook.com/umfsschaerding
P-25パターン
色々な視点から見比べます。
2ラウンド終了
フェイスブック
https://www.facebook.com/umfsschaerding/?ref=embed_page
は、ログインしなくても見られると思います。
主催クラブ
https://www.modellflug-schaerding.at
フェイスブック
https://www.facebook.com/umfsschaerding/?ref=embed_page
選手
https://www.facebook.com/yutaka.ito.165470
https://www.facebook.com/kimiyo.takahashi.161
https://www.facebook.com/christian.niklass
1ラウンド終了

私が一番驚いているのは競技エリアのレイアウトで、クラブハウス側の上空を飛行します。


クラブハウス側から撮られた写真。
まぁ、主な飛行コースの下は問題無さそうですが。
オーストリアでの大会が始まった様です。

https://www.facebook.com/yutaka.ito.165470
https://www.facebook.com/kimiyo.takahashi.161
TakJPさんが手ぶれ補正の動画を作ってアップしてくれました。
機体の姿勢がよく分かって面白いですね。
以前は、YouTubeの付属機能にスタビライズ加工があって手ぶれ補正が簡単に行えたのですが、それが消えてしまってから動画の利用が少なくなっていました。
調べてみると、手ぶれ補正のソフトもある様なので、そういうものを使ってみるのも良さそうです。
TDさんのF-25。
風の中だそうです。
こちらは全く別の人のF-25。
これも上手です。
2機同時飛行を 将来トライしてみたいですが、どうやるのか よくわからない
以下のYoutube 3:52辺りで説明されてますが…うーん🤔
メッシュネットワークを構築して同期させているのと、既に仕組みは組み込まれている様子
零戦でシンクロ飛行したら デモ飛行としては最高のものになるのではないかと妄想しています
https://www.youtube.com/live/8yXhSpkEKkY?si=kZSXoViLo9wJB6nW