Gernot Bruckmann
Antonin Paysant-Le Roux
11位になったオランダのDerk Van Der Vecht選手による目慣らし飛行。
最終結果 Results
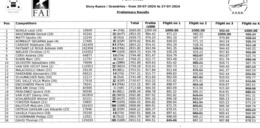
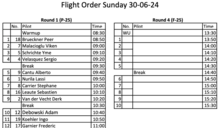
準決勝の結果
対応方法のご提案をありがとうございます。 残念ながらもとのFCは電源周りが焼けてしまったので動作しません。マイコンチップ自体も逆電圧、過電圧などがかかって壊れているかもしれません。 新品のFCはそれなりの価格がしますので https://morris-hobby.securesite.jp/97_2170.html このためだけに購入するのもイマイチでして。ですが栃木の知り合いが同じ物を使っていますので、今度出かけた時にメモリ内容を読みださせてもらおうと思います。 ありがとうございました。
準決勝の1ラウンド目 準決勝はもう1ラウンド行います。
正常に動作するFCをお持ちでしたら、STM32CubeProgrammerでメモリ内容を読みだして binファイルに書き出し。 該当FCに書き込みするっていうアイデアはいかがでしょうか
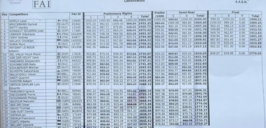
予選の結果 Results 上位30名が準決勝に進みます。
FCScoreは今の所まだ利用できませんが、今年の後半か来年のリリースに向けて準備が進んでいる様です。
予選2ラウンド目
大会の様子はこちらで見られます。 Daily newsletters
1ラウンド目の結果
予選の飛行順 Results > Starting order
参加選手 Juan Rombaut HU Haitao Thomas David Sandro Matti Christian Niklass Gernot Bruckmann Lassi Nurila
秋の大会の案内はまだ公開されていませんが、次回からは自動採点が採用される様です。 参加選手がジャッジをしなくても良くなるので、出場者が増えるかもしれません。
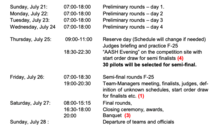
競技は21日に予選が始まって、27日が決勝です。
パイロット位置とセンター位置を設定する時に使うツールがリリースされたようです 利用者から要望があったのでしょうか
https://github.com/arniemansell/fcbe
これから、飛行場登録しようとする時は 便利かもしれません
このトピック(リンク集)のトップの内容を随時更新しています。 (2024.10.25更新)
プロッターの最新版がv4.2.7HLとなって「GPSデータのみによる航跡」が追加されました。
Settingsの下の方にあるボタンを右側に移すと、補助画面の中で「GPS」が選べる様になります。
試しにBINファイルを開いてみると、
中にはこんな箇所も。
「Open JSON2」の機能を利用して、あらかじめ作っておいた同じフライトのJSONファイルと重ねてみる事もできます。
別の調子の良いユニットではこんな感じで、良く合致しています。
今のフライトコーチは、様々なデータを寄せ集めて計算された結果がラインとして描かれるので、GPSデータだけのラインは機体の姿勢も分からず、飛行データを使った初期の飛行解析の様なものです。 ただ、GPSモジュールの性能がそのまま表れるので、衛星捕捉数確認と並んで、器材の性能判定には役立ちそうです。
デバイスによっては「Submit」ボタンの表示がギリギリの事があります。
こんな時は、ブラウザ右上の設定にある「ズーム」を使うと、簡単に大きさが変えられたのですね。
ワールドカップではありませんが、7月20〜27日に 「FAI F3A ヨーロッパ選手権 2024 ベルギー」が開催されます。 主催サイトAASH 参加選手
アメリカのSCさんのP-25 OneDriveからダウンロードできます。 00000011.BIN BINファイルを調べると衛星捕捉数が12以下と少ないので、リボンのジャンプが目立ちます。
リヒテンシュタインの最終結果 https://modellflug.ch/events.aspx?lang=EN&event=7412
途中経過 Ranking
画面が小さいので、フライトを細かく調べるには工夫が必要ですが、現場で直ぐにチェックできるのは良いことです。
---スマホでフライトコーチ---
スマホを新しいものに変えたので、フライトコーチを試してみました。
まず必要なのはコネクタータイプが適合した「SDカードリーダー」で、 スマホのブラウザの方にはプロッターをブックマークしておきます。
プロッターを呼び出し、スマホ本体には飛行データの入ったマイクロSDカードを接続します。
プロッター画面の「Load BIN」を押し、
メディアの選択でUSBドライブを指定して、その中から見たいフライトのBINファイルを選びます。 APM>LOGS>※※.BIN
補助画面が出ますが、登録飛行場の場合は自動的に飛行場データが入っているので、演技名を選んでからSubmitを押します。
すると、こんな感じで3Dリボン図が再現されます。
未登録飛行場の場合は飛行場の緯度経度の入力が必要ですが、不完全でもいいから取り敢えずデータの確認をしたい時には、「manual」を選んでから「Copy Origin」を押すという方法もあります。→コメント41
---それと、終了時のSDカードの取り外しは次の手順で行います---
(スマホ本体の)設定項目 ↓ 全てを見る ↓ ストレージ ↓ ページ一番上の「このデバイス」>USBドライブ ↓ 右上の「メニュー」>取り出し
(2024.7.6追記) もっと簡単な取り外し方法がありました。 上記中程の「メディアの選択」の画面に、USBドライブの取り外しマークがあります。
2024年7月6日(土) 〜7日(日) F3Aワールドカップ リヒテンシュタイン2024 参加者 56th F3A World Cup Liechtenstein 2024
データが上手く取れなかったユーザさんの例。
色々調べてみたところ、不調の原因は待機時間にありました。 フライト開始の条件としては、「GPSのLEDの点滅開始」が大切です。 コントローラー側のLED点灯ではありません。
「点滅」を確認してからフライトさせると、通常通りの結果が得られました。
旧タイプのユニットの中には、コールドスタートや再フライトでのGPSロックに10~20分かかるものもあります。 その場合は、マイクロSDカードを入れずにフライト開始のかなり前から通電しておき、飛行する時に電源を入れ直してその時にカードをセットすると良いでしょう。
通常通りのデータは得られましたが、良く見ると、この掲示板でもしばしば話題になった航跡のジャンプが見られます。 特に、背面や、背面から垂直になった姿勢で目立ちます。
これは、当時のGPSモジュールの性能としては仕方ない所でもあり、現在では新しい世代のものに変わっているのです。
尚、以前旧タイプのユニットを購入されたユーザさんには、前と同じ価格で新しいタイプを販売することにします。 ご検討ください。
参加は1人だけだったそうです。 Joywu.json
ドイツのRegensburg(レーゲンスブルク)の動画がありました。 https://www.br.de/br-fernsehen/sendungen/abendschau/abendschau-modelflug-100.html?fbclid=IwZXh0bgNhZW0CMTAAAR0lMSf2PII1BRYJhm4BBiE7ivEg1lMAQhfAayvYGvO_RREebqQY1jis_fo_aem_OGGDsVYsJTqracKQqKFJuA
オランダの最終結果。 https://www.lowlandcup.com/final-results-f3a-lowland-cup-2024/
初日の2ラウンドの結果。 https://www.lowlandcup.com/results-after-two-rounds/
飛行順が発表されています。 https://www.lowlandcup.com/f3a-lowland-cup-2024-startorder/
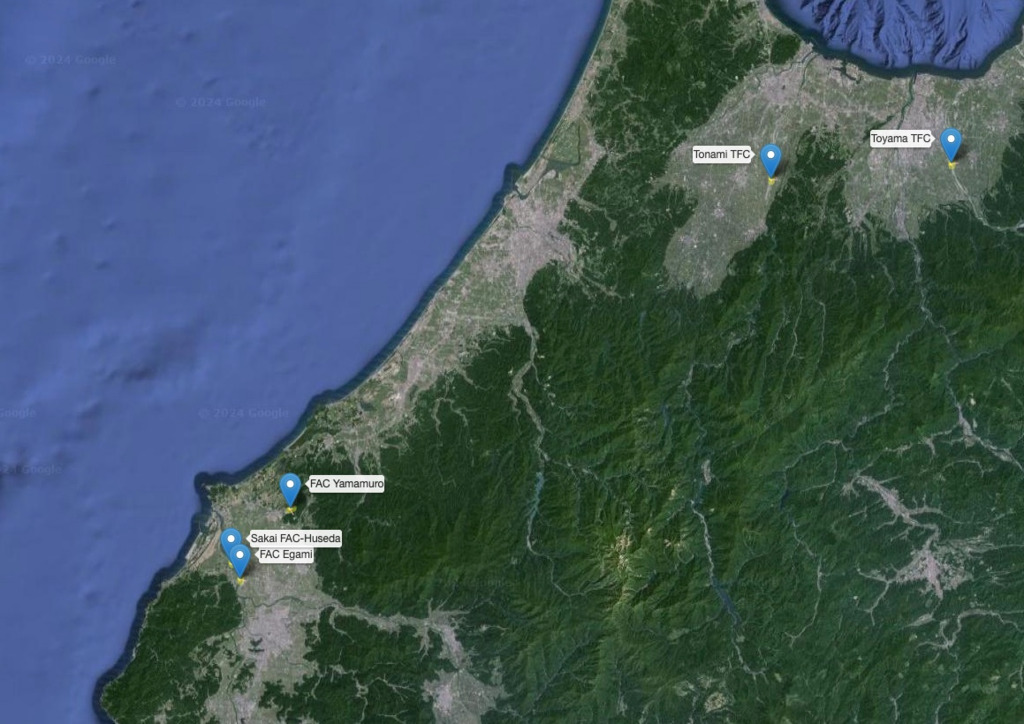
最近、福井県で登録がありました。
フランス大会の写真 World Cup F3A Reyrieux 22-23 Juin 2024
6月29〜30日にはオランダで 「F3A LOWLAND CUP 2024」が開催されます。 https://www.lowlandcup.com/10th-f3a-lowland-cup-2024/ 参加選手
トラブル事例と対策方法のご提示をありがとうございます。 私も老眼で手元が見えません。いつも電源線の黒の線の位置を合わせながら挿入しているつもりなのですが、なぜか逆に挿しかけることもありました。なので私も早速、赤のマジックでグリグリと色を塗りました。 これでも間違えそうな場合は、配線に逆接保護のダイオードでも入れようかと思いますが、そこまでボケてきたら免許返納ですかね。😄

Gernot Bruckmann
Antonin Paysant-Le Roux
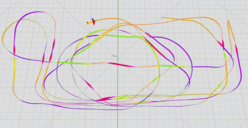
11位になったオランダのDerk Van Der Vecht選手による目慣らし飛行。
パイロット後方からの横風が強いので、機影だけしか写せないビデオ映像では判断が難しいものがあります。
最終結果

Results
準決勝の結果

対応方法のご提案をありがとうございます。
残念ながらもとのFCは電源周りが焼けてしまったので動作しません。マイコンチップ自体も逆電圧、過電圧などがかかって壊れているかもしれません。
新品のFCはそれなりの価格がしますので
https://morris-hobby.securesite.jp/97_2170.html
このためだけに購入するのもイマイチでして。ですが栃木の知り合いが同じ物を使っていますので、今度出かけた時にメモリ内容を読みださせてもらおうと思います。
ありがとうございました。
準決勝の1ラウンド目

準決勝はもう1ラウンド行います。
正常に動作するFCをお持ちでしたら、STM32CubeProgrammerでメモリ内容を読みだして binファイルに書き出し。
該当FCに書き込みするっていうアイデアはいかがでしょうか
予選の結果
Results
上位30名が準決勝に進みます。
FCScoreは今の所まだ利用できませんが、今年の後半か来年のリリースに向けて準備が進んでいる様です。
予選2ラウンド目

大会の様子はこちらで見られます。
Daily newsletters
1ラウンド目の結果

予選の飛行順
Results > Starting order
参加選手
Juan Rombaut
HU Haitao
Thomas David
Sandro Matti
Christian Niklass
Gernot Bruckmann
Lassi Nurila
秋の大会の案内はまだ公開されていませんが、次回からは自動採点が採用される様です。

参加選手がジャッジをしなくても良くなるので、出場者が増えるかもしれません。
競技は21日に予選が始まって、27日が決勝です。
パイロット位置とセンター位置を設定する時に使うツールがリリースされたようです
利用者から要望があったのでしょうか
https://github.com/arniemansell/fcbe
これから、飛行場登録しようとする時は 便利かもしれません
このトピック(リンク集)のトップの内容を随時更新しています。
(2024.10.25更新)
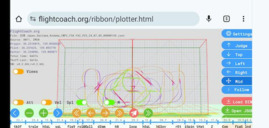
プロッターの最新版がv4.2.7HLとなって「GPSデータのみによる航跡」が追加されました。
Settingsの下の方にあるボタンを右側に移すと、補助画面の中で「GPS」が選べる様になります。

試しにBINファイルを開いてみると、
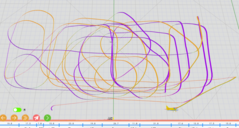
中にはこんな箇所も。

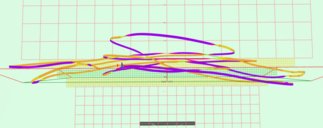
「Open JSON2」の機能を利用して、あらかじめ作っておいた同じフライトのJSONファイルと重ねてみる事もできます。

別の調子の良いユニットではこんな感じで、良く合致しています。
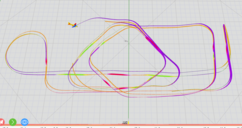
今のフライトコーチは、様々なデータを寄せ集めて計算された結果がラインとして描かれるので、GPSデータだけのラインは機体の姿勢も分からず、飛行データを使った初期の飛行解析の様なものです。
ただ、GPSモジュールの性能がそのまま表れるので、衛星捕捉数確認と並んで、器材の性能判定には役立ちそうです。
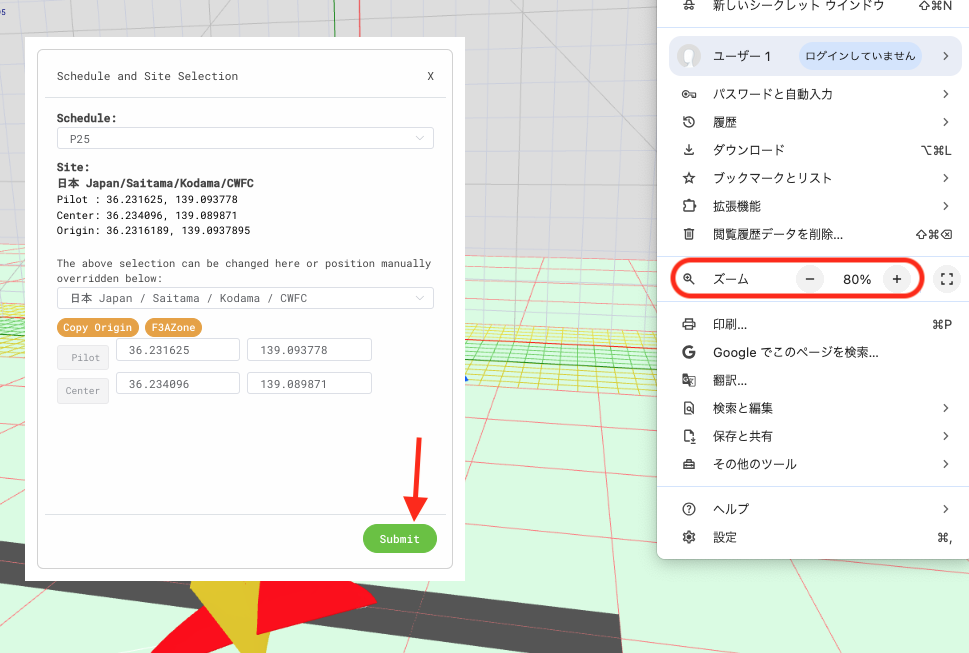
デバイスによっては「Submit」ボタンの表示がギリギリの事があります。
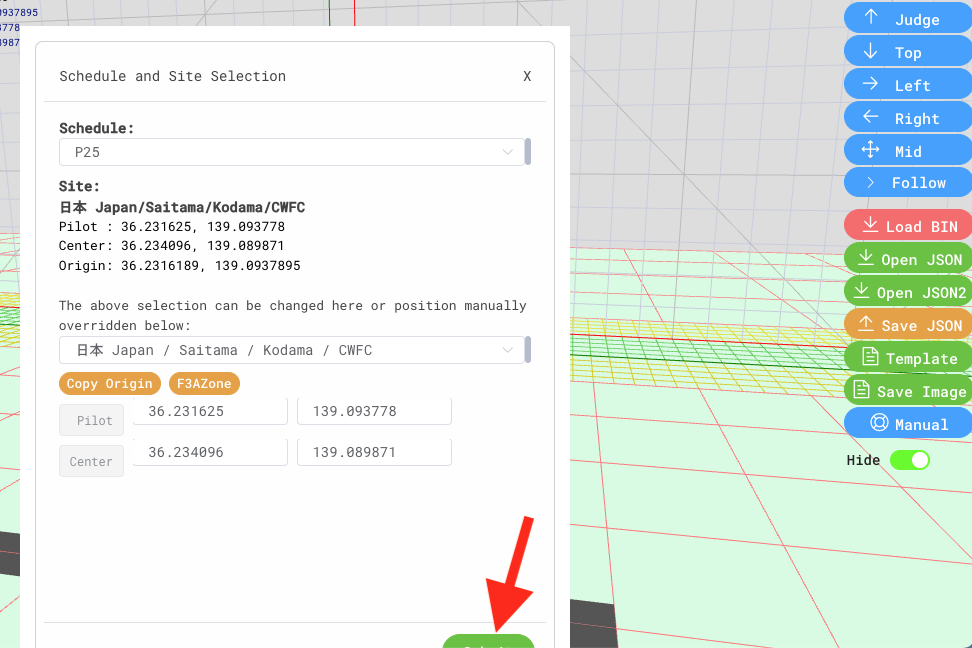
こんな時は、ブラウザ右上の設定にある「ズーム」を使うと、簡単に大きさが変えられたのですね。
ワールドカップではありませんが、7月20〜27日に

「FAI F3A ヨーロッパ選手権 2024 ベルギー」が開催されます。
主催サイトAASH
参加選手
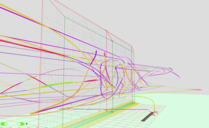
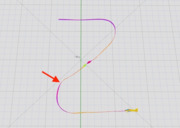
アメリカのSCさんのP-25

OneDriveからダウンロードできます。
00000011.BIN
BINファイルを調べると衛星捕捉数が12以下と少ないので、リボンのジャンプが目立ちます。
リヒテンシュタインの最終結果


https://modellflug.ch/events.aspx?lang=EN&event=7412
途中経過
Ranking
画面が小さいので、フライトを細かく調べるには工夫が必要ですが、現場で直ぐにチェックできるのは良いことです。


---スマホでフライトコーチ---
スマホを新しいものに変えたので、フライトコーチを試してみました。
まず必要なのはコネクタータイプが適合した「SDカードリーダー」で、

スマホのブラウザの方にはプロッターをブックマークしておきます。
プロッターを呼び出し、スマホ本体には飛行データの入ったマイクロSDカードを接続します。

プロッター画面の「Load BIN」を押し、

メディアの選択でUSBドライブを指定して、その中から見たいフライトのBINファイルを選びます。

APM>LOGS>※※.BIN
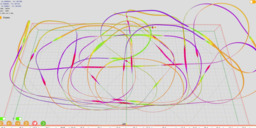
補助画面が出ますが、登録飛行場の場合は自動的に飛行場データが入っているので、演技名を選んでからSubmitを押します。

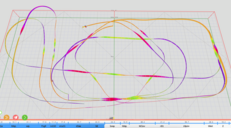
すると、こんな感じで3Dリボン図が再現されます。

未登録飛行場の場合は飛行場の緯度経度の入力が必要ですが、不完全でもいいから取り敢えずデータの確認をしたい時には、「manual」を選んでから「Copy Origin」を押すという方法もあります。→コメント41

---それと、終了時のSDカードの取り外しは次の手順で行います---
(スマホ本体の)設定項目

↓
全てを見る
↓
ストレージ
↓
ページ一番上の「このデバイス」>USBドライブ
↓
右上の「メニュー」>取り出し
(2024.7.6追記)

もっと簡単な取り外し方法がありました。
上記中程の「メディアの選択」の画面に、USBドライブの取り外しマークがあります。
2024年7月6日(土) 〜7日(日)
F3Aワールドカップ リヒテンシュタイン2024
参加者
56th F3A World Cup Liechtenstein 2024
データが上手く取れなかったユーザさんの例。
色々調べてみたところ、不調の原因は待機時間にありました。

フライト開始の条件としては、「GPSのLEDの点滅開始」が大切です。
コントローラー側のLED点灯ではありません。
「点滅」を確認してからフライトさせると、通常通りの結果が得られました。
旧タイプのユニットの中には、コールドスタートや再フライトでのGPSロックに10~20分かかるものもあります。
その場合は、マイクロSDカードを入れずにフライト開始のかなり前から通電しておき、飛行する時に電源を入れ直してその時にカードをセットすると良いでしょう。
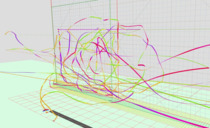
通常通りのデータは得られましたが、良く見ると、この掲示板でもしばしば話題になった航跡のジャンプが見られます。
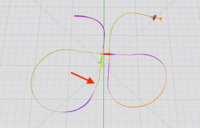
特に、背面や、背面から垂直になった姿勢で目立ちます。
これは、当時のGPSモジュールの性能としては仕方ない所でもあり、現在では新しい世代のものに変わっているのです。
尚、以前旧タイプのユニットを購入されたユーザさんには、前と同じ価格で新しいタイプを販売することにします。
ご検討ください。
参加は1人だけだったそうです。
Joywu.json
ドイツのRegensburg(レーゲンスブルク)の動画がありました。
https://www.br.de/br-fernsehen/sendungen/abendschau/abendschau-modelflug-100.html?fbclid=IwZXh0bgNhZW0CMTAAAR0lMSf2PII1BRYJhm4BBiE7ivEg1lMAQhfAayvYGvO_RREebqQY1jis_fo_aem_OGGDsVYsJTqracKQqKFJuA
オランダの最終結果。

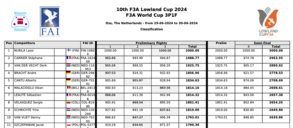
https://www.lowlandcup.com/final-results-f3a-lowland-cup-2024/
初日の2ラウンドの結果。

https://www.lowlandcup.com/results-after-two-rounds/
飛行順が発表されています。
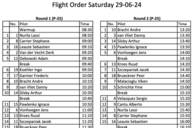
https://www.lowlandcup.com/f3a-lowland-cup-2024-startorder/
最近、福井県で登録がありました。
フランス大会の写真

World Cup F3A Reyrieux 22-23 Juin 2024
6月29〜30日にはオランダで 「F3A LOWLAND CUP 2024」が開催されます。

https://www.lowlandcup.com/10th-f3a-lowland-cup-2024/
参加選手
トラブル事例と対策方法のご提示をありがとうございます。
私も老眼で手元が見えません。いつも電源線の黒の線の位置を合わせながら挿入しているつもりなのですが、なぜか逆に挿しかけることもありました。なので私も早速、赤のマジックでグリグリと色を塗りました。
これでも間違えそうな場合は、配線に逆接保護のダイオードでも入れようかと思いますが、そこまでボケてきたら免許返納ですかね。😄