
Flight Coach BBS
フライト・コーチに適したFC / 22
24
コメント
views
2
フォロー
22
デフォルトのパラメータでは「origin set」が4個有ります。飛行軌跡もガクガクしていて使えませんでした。

そこで以下の2箇所のパラメータを変更すると「origin set」が1個になります。
「EK2_ENABLE」1を0に変更、「EK3_IMU_MASK」3を1に変更

6日土曜日、かなりの強風でしたが、飛ばしてみました。

6軸センサ「ICM42688-P」を使った「H743-SLIM V3」と、衛星捕捉数が多い「M10Q-5883」、そして軽量。
適当なフライトでしたが、ジャンプもなく一応使えることがわかりました。
Omnibusのように、プルアップ抵抗も必要ありません。
GPS配線6本のハンダ付けと電源のハンダ付けだけです。
Omnibusと違うところは、ファームウェアの書き込みに「STM32CubeProgrammer」を使うことぐらいで、
他は、Omnibusと同じです。入力は2~8SのLiPo対応です。
通報 ...
飛行姿勢で衛生捕捉数がどの程度減ってたのか、飛行時のログを見てみました。
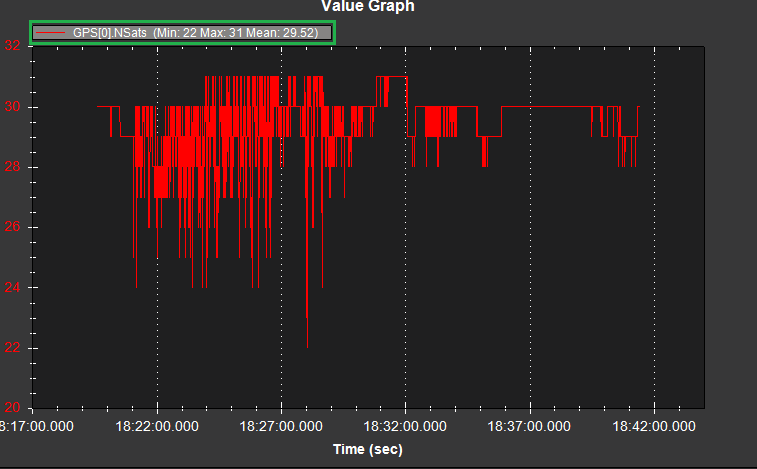
最低でも22個補捉してました。
NSats(衛星捕捉数):Min:22 Max:31 Mean:29.52
精度も悪くないようです。
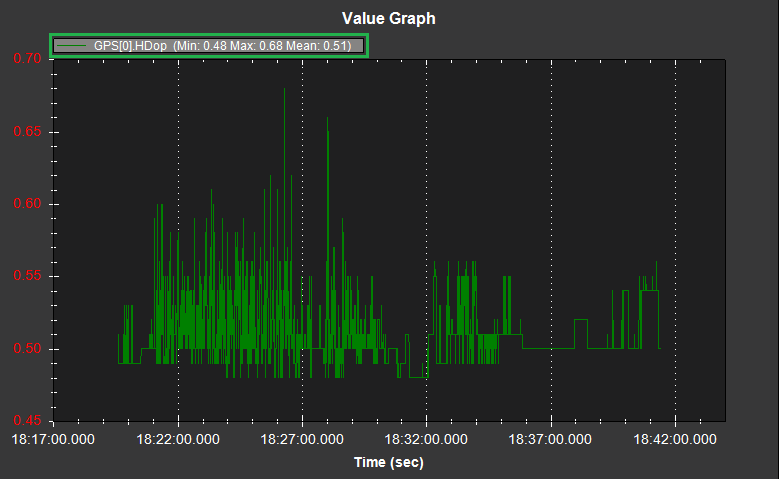
HDop(水平方向の精度):Min:0.48 Max:0.68 Mean:0.51
ちなみに、パラメータに関してはよく理解してないので間違ってるかもしれませんが、
以下のように変更しました。
EK2_ENABLE → 0
EK3_IMU_MASK → 1
COMPASS_AUTODEC → 1
COMPASS_DEC → 0
ARSPD_TYPE → 1