
いつもお世話になっております。
NC旋盤でのインクリメンタル指令(U,W)の軌道が合わないことが多々あり質問させて下さい。
例1
G1X100.5Z-0.5
Z-29.
G0U3.Z10.
例えばこのようなプログラムで「G0U3.Z10.」ではXマイナス方向に移動してしまいます。
実際の機械ではXプラス方向に退避します。
例2
G1X41.1F0.05
G2X41.W-0.05R0.05
G1Z-47.F0.12
こちらの例では「G2X41.W-0.05R0.05」でZプラス方向に大きく退避するような動きとなりますが、
実際の機械では直線補間と円弧補間が繋がります。
U,Wを使用すると例のように意図しない動きになることが多いです。
ご対応いただければ非常に助かります。
もし設定等で対応可能でしたらご教示ください。
よろしくお願いいたします。
こんにちは
そもそもで申し訳ないですが,NC旋盤でのインクリメンタル指令(U,W)は現在サポートされておりません orz
単純に需要がなかったということですが,これを機に対応したいと思います.
しばらくお待ちください.
お世話になっております。
ご確認いただきありがとうございます。
現在未対応とのことで承知いたしました。
また、今後更新対応していただけるとのことで大変恐れ入ります。
何卒よろしくお願いいたします。
たぶんできたと思うのですが,いかんせん検証作業が難しく,どうしようかと思案中(Pre-Releaseで公開とか?).
公開しても良いサンプルとかありませんか~?
この掲示板は画像しか貼り付けできないので,Googleドライブへのリンクか,私宛にメール頂けると幸いです.
(メルアドはREADME.txtの中にあります)
とりいそぎ上の例1,例2をそのまま入力してみた画像を添付します.クリックすると大きく表示されます.
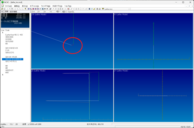
画像に丸印をつけたところですが,これがどうもわからなくて...
お世話になっております。
返信遅れまして申し訳ありません。
早速のご対応いただきありがとうございます。
メールさせていただきましたのでご確認いただけますと助かります。
何卒よろしくお願いいたします。
はて,届いていないようです.
まがら@maizuru-ct.ac.jp 間違いないですか?(全角ひらがなは半角英字に変換)
ローカルの迷惑フォルダにもないので,上位ではねられてるかも?
データは圧縮して送ってくださいね.
お手数をおかけしますが,よろしくお願いします.
あと,
そのデータのシミュレーション結果は,確認のためここに掲示しても良いですか?
無事受け取りました.以下のような感じで大丈夫でしょうか?
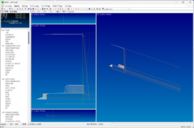
画像では少しわかりにくいかもしれませんが,現リリースよりもうまく逃げが表現できていると思います.
お世話になっております。
アドレスに間違いがあったため送付できていませんでした。
お手数をお掛けいたしました。
また、ご確認いただきありがとうございます。
問題無くインクリメンタル指令の動きになっていることが確認できました。
お忙しい中迅速にご対応いただき感謝申し上げます。
更新版への盛り込みを心よりお待ちしています。
この度は誠にありがとうございました。