スピンで気を付けなければいけない事の一つに、「完全停止が条件では無い」という事があります。
水平飛行中に失速させるので当然な事ですが、 FAI Sporting Code
Radio Control Aerobatics 2024 Edition
の、5B.8.12. SPINS には、次の様に記されています。
ーーーーー
Judges must carefully observe the stalled attitude, which is not necessarily a complete stop, especially in no-wind conditions. This is no reason for downgrading.
審査員は失速姿勢を注意深く観察しなければならないが、特に無風状態では必ずしも完全に停止するとは限らない。 これは格下げの理由にはなりません。
ーーーーー
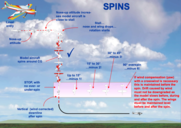
尚、マヌーバーガイドにはスピンについて次の様な解説があります。

No.16〜No.26
No.7〜No.15
1R目のフライト順と動画です。
目慣らし〜No.37〜No.43
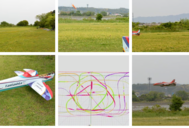
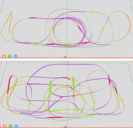
これも当日のフライトとは関係ありませんが、正確なフライトはどこから見ても狂いがなく綺麗に見えるものです。
1Rのトップ選手のフライトも正にこんな感じでした。
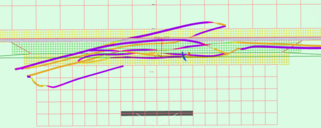
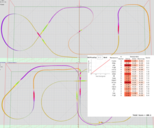
例えば上のサンプル画像の場合だと、トップビューはこんな感じに飛行コースが曲がっていました。
観戦した1R目当日は直射日光が強かったので、駐車場に停めた車のバックドアの下から多くのフライトを見ていました。

(フライト画像はイメージ)
この位置からだと、コースの曲がりや演技位置が丸見えです。
採点はジャッジ席からの見た目で行われるので、ここで見えたものが点数に直結する訳ではありませんが、トップ選手のフライトともなるとこの視点でも正確なものがありました。
一方、中には、ここで良いフライトに見えたのに得点が伸びていない例もあります。
ルール上は仕方ない事ですが、ジャッジ席からでなければ見えないミスが重なったのかもしれませんし、
この辺が採点競技の難しいところでもあります。
当日のフライトデータは無理なので、普段のフライトがどの様に行われているのか、色々な方々のフライトを紹介して頂けると有り難いです。
2Rが終了し、結果が発表されています。
現在の北米。
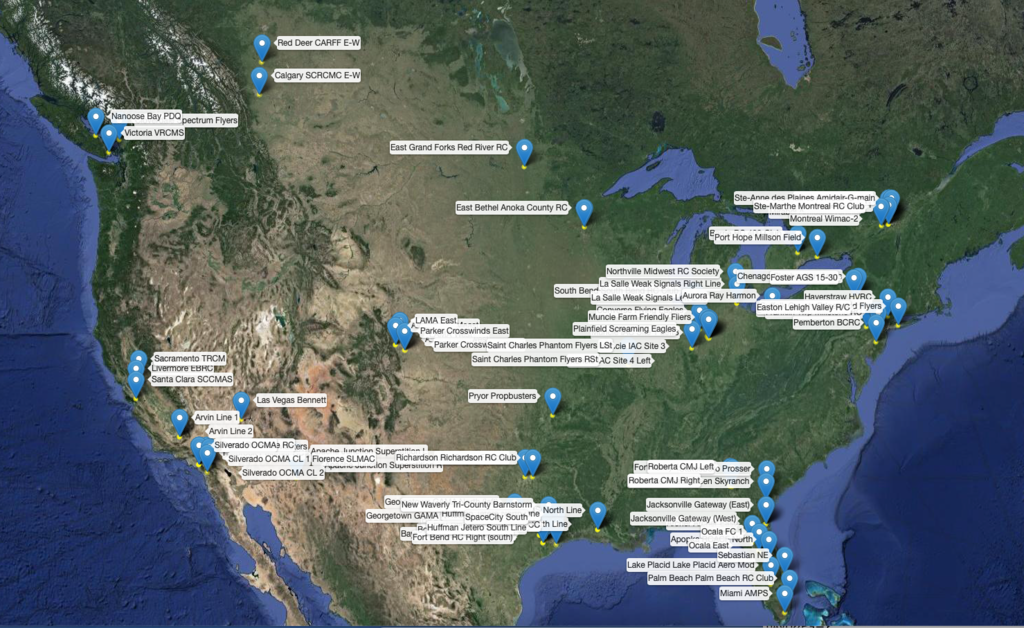
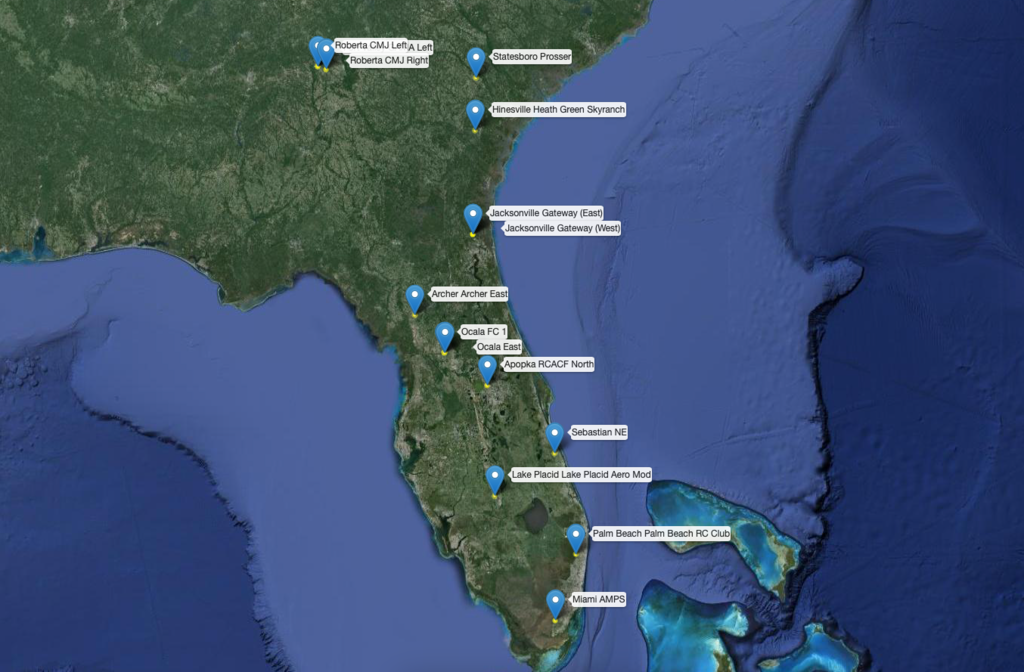
フロリダだけでもかなりの数になります。
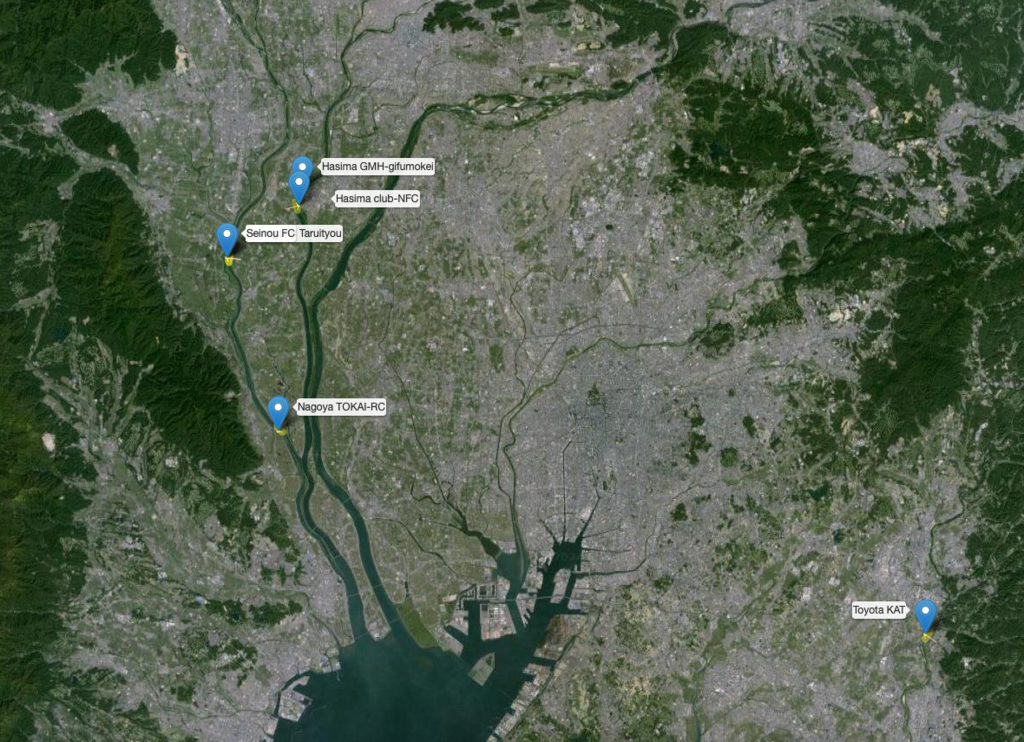
現在の岐阜や愛知の状況。
本日の長野は全国1番の暑さで31度。



そんな中、第1Rが終了。
結果が発表されています。
2024年度 F3A日本選手権 関東甲信越地区予選
私は11日(土)にクラブの仲間と見学に行く予定です。
フライトコーチの話などあったら会場で声をかけてください。
サイトのトップページ写真の左端が私です。
ゼッケンと飛行順
スタートNo.は受付日に決定。
2R目は23名繰り下げてスタート。
現在のWebページ
TDさんの練習風景。
練習風景。
飛行エリアをズラしているのが分かります。
たまたまでしょうが、ソウルの飛行場と同じ向きになっています。
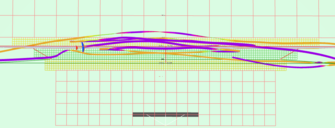
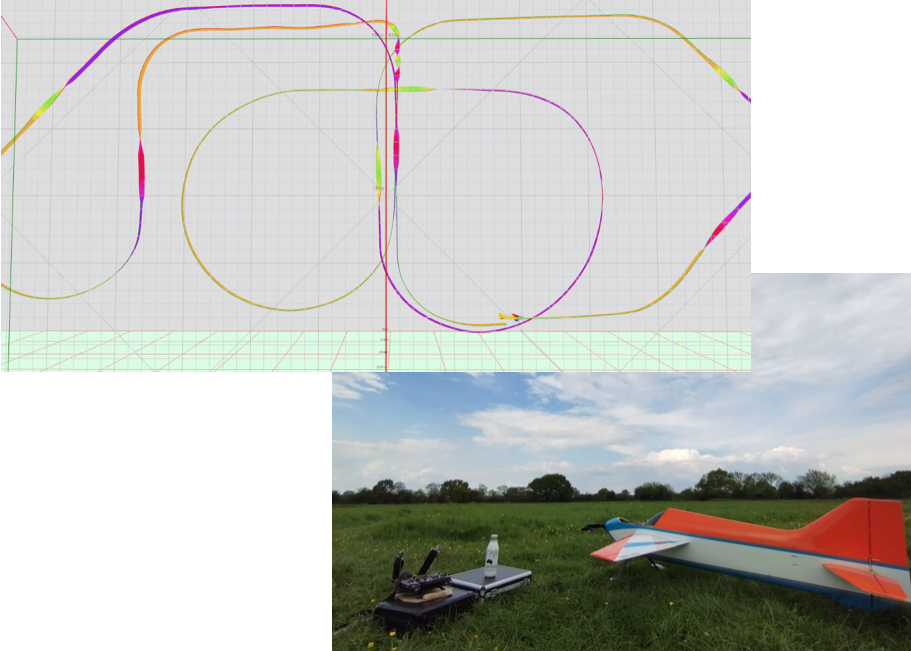
こちらは先日5月5日のフライトとの比較。
ちょっと風が出始めた頃です。
左のハーフスクエアの曲がりは、パイロット目線からは判りません。
TDさんの最新のフライト。
準備が進んでいる様です。
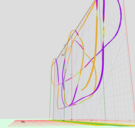
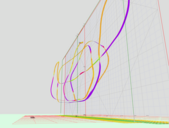
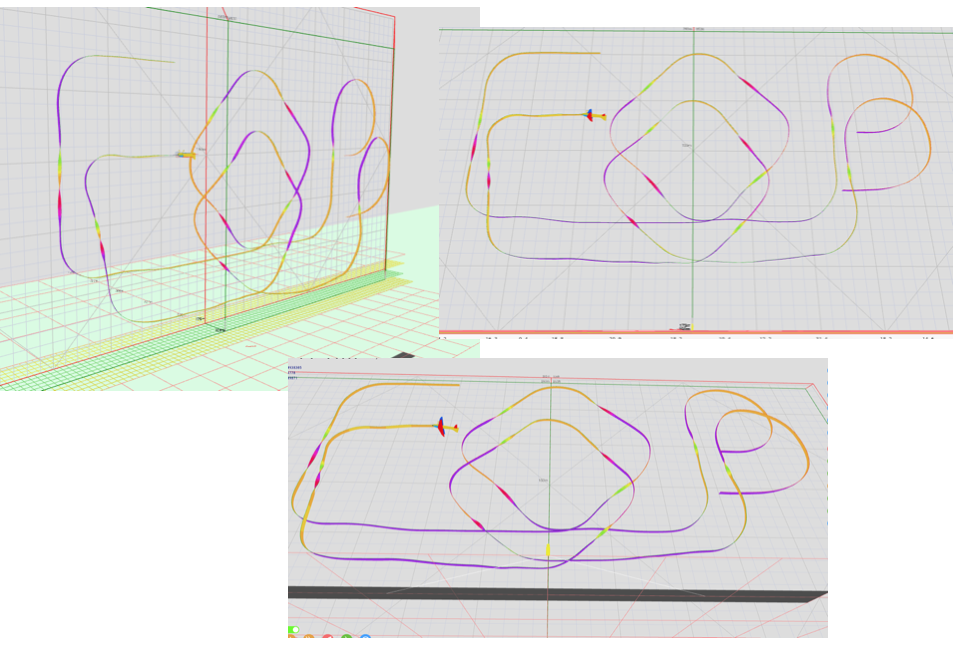
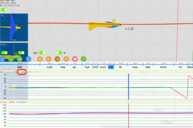
自動操縦によるP-25のフライトデーターを提供して頂いたので、ミュゼットのフライトと比べてみました。
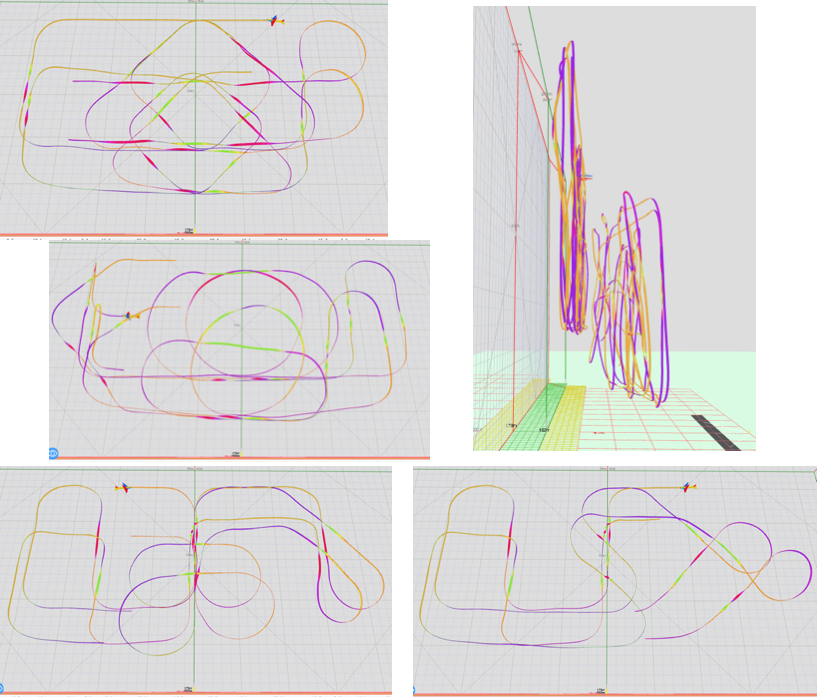
見ての通り、奥側が自動操縦によるもので、機体の詳細は不明ですが中型のスケールアクロ機の様です。
手前のミュゼットの方は、以前ブログでデータをアップしたフライトです。
スピンで気を付けなければいけない事の一つに、「完全停止が条件では無い」という事があります。


水平飛行中に失速させるので当然な事ですが、
FAI Sporting Code
Radio Control Aerobatics 2024 Edition
の、5B.8.12. SPINS には、次の様に記されています。
ーーーーー
Judges must carefully observe the stalled attitude, which is not necessarily a complete stop, especially in no-wind conditions. This is no reason for downgrading.
審査員は失速姿勢を注意深く観察しなければならないが、特に無風状態では必ずしも完全に停止するとは限らない。 これは格下げの理由にはなりません。
ーーーーー
尚、マヌーバーガイドにはスピンについて次の様な解説があります。
コンパスキャリブレーションは、磁気センサのXYZ軸毎のオフセットやゲインのずれを修正して方位磁石の北を検出できるようにするものです。
このずれはセンサ固有のズレ以外に、周囲の磁場に大きく影響されるのでユニット単体でキャリブレーションしていても、機体に搭載するとモータやサーボなどからの磁力でずれてしまいます。
地磁気以外の磁場を極力無くさないと正確な方位が検出できなくなるので磁場を乱すものからできるだけ離してからキャリブレーションする必要があります。
私の場合はサーボが20cm以内にあると方位の検出が怪しくなりました。また電池によっては磁力のあるものもある様です。
COMPASS_AUTODECの処理内容を理解しているわけではありませんが、方位磁石の北が正確に検出できるようにしておかないとCOMPASS_AUTODECも機能しないと思います。
現在の東海地区。
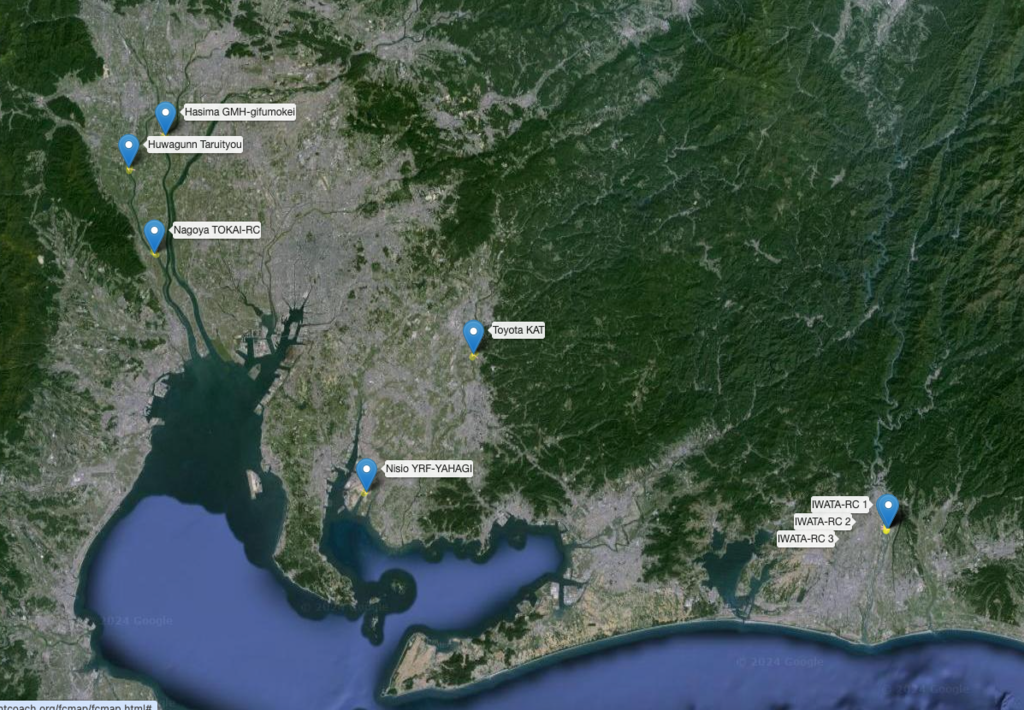
少し増えました。
自動操縦によるスポーツマン演技
F-25パターン
4:32はハーフロールです。
中古パソコンのススメ
大井川でUコンのブログ 春らんまん
パソコンの選び方
中古パソコン販売会のチラシは時々目にする事がありますが、当地区でもこんなものが開かれるそうです。

道の駅ららん藤岡にて中古パソコン販売会
P-25 参考資料 by NAGACHAN
http://www.morris-hobby.jp 左下からジャンプ
■2.4GHzラジコン電波
2.4GHzラジコン電波についてはCQ出版社 RFワールドNo.16に特設記事があります。
「2.4GHz帯ディジタル方式が登場し,双方向データ通信によって用途が広がる!
ホビー&産業用ラジコンの無線技術,法規制と電波伝搬」
https://www.rf-world.jp/bn/RFW16/samples/p092-093.pdf
FUTABAが採用している周波数ホッピング方式、JRが採用している直接拡散方式、2.4GHzの電波伝搬の解説が書かれています。
またRFワールドNo.37の特設記事では
「..周波数ホッピング方式のラジコン無線機は混信に強く、理論上は500台の同時運用が可能と言われてます。」と書かれていました。
https://www.rf-world.jp/bn/RFW37/samples/p068-069.pdf
ホッピングの滞留時間についての情報がネット記事にありました。
ラジコンプロポも2.4GHz帯活用、利用拡大で総務省の委員会が報告書案
https://internet.watch.impress.co.jp/cda/news/2008/01/22/18193.html
1)FH方式では、ホッピングの滞留時間が50ms以下であること、2)その他の方式では、運用開始の初期において、キャリアセンスを用いること──のいずれかに合致するものであることとしている。その他の技術的条件は、2.4GHz帯の小電力データ通信システムと同一とする。
ホッピングの滞留時間については、ラジコン飛行機は半径500m程度の範囲を時速90km(秒速25m)程度で飛行する可能性があり、干渉による通信データの欠落があっても操作の遅延を概ね100ms以下にとどめる必要があるというのが根拠だ。通常の小電力データ通信システムでは0.4秒以下とされているのに対して、ラジコンではホッピング滞留時間を短く規定することで遅延の可能性を軽減する。また、キャリアセンスとは、周辺でのチャンネルの利用状況を検出し、空きチャンネルを使用する方式のことだ。
周波数ホッピングしている電波をモニタしようとすると3桁万円の測定器が必要になります。
10年以上前のちょい古い動画ですが、現代のデジタル技術が使用された2.4GH帯の電波のモニタには周波数と時系列での変化を観測する必要があるのがわかります。
テクトロニクスのリアルタイム・スペクトラム・アナライザのご紹介
https://youtu.be/9Ge8kUY1Wi0?si=htfd3j0vHt_WUxBh
周波数ホッピングと電子レンジの雑音電波との干渉の確認をしています
Tektronix RSA6100AでNintendo DSとPlayStation3と電子レンジとの振る舞いを見た!
https://youtu.be/HFZMBMnsjFY?si=ZM_Q6J9FPwBFinCG
コメント21にあるアドバンスドBの動画版です。
MBP JAPAN飛行場は、新たにMBP2として登録されました。
ブラウザのキャッシュをクリアしてから、プロッターやFCマップを再読み込みしてください。
MBP JAPAN飛行場はセンターラインが変更されたので、新たにMBP2として登録してもらいました。
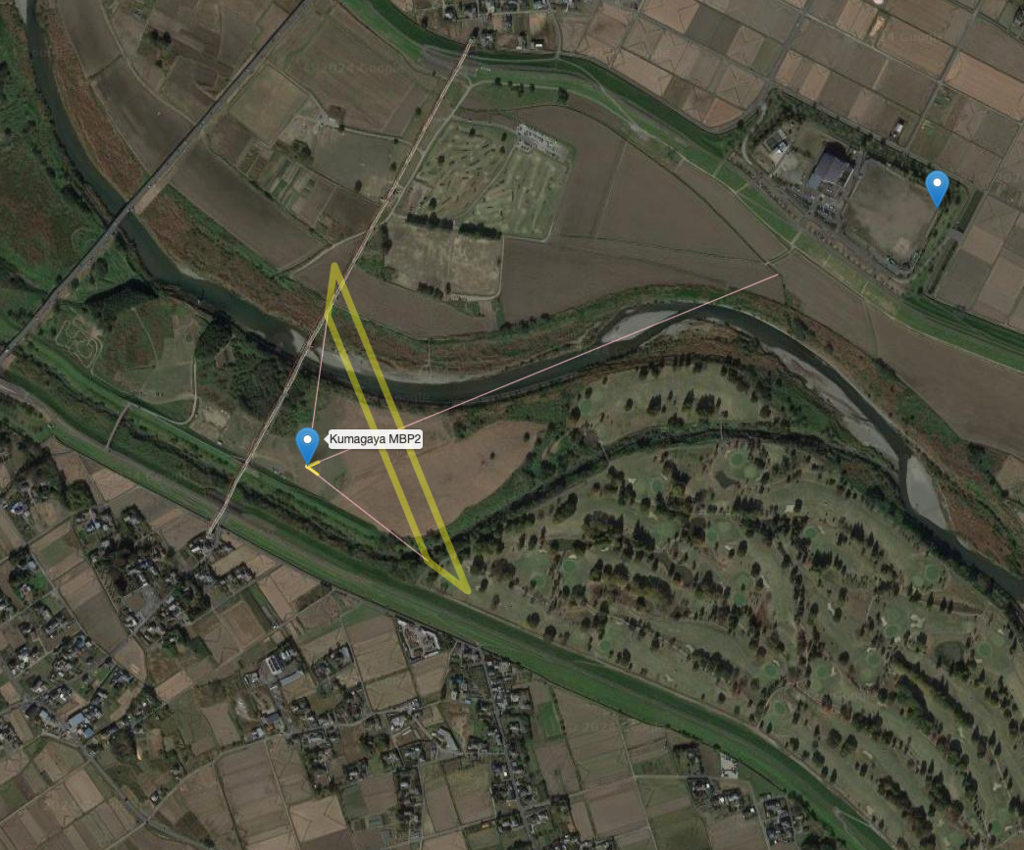
これを使用するには、ブラウザのキャッシュをクリアしてから、プロッターやFCマップを再読み込みする必要があります。
前のコメントで省略した部分の画像です。







画像翻訳を使えばこの様に見えるというサンプルとして貼り付けておきます。
(2024.4.15加筆)
競技会の方は無事終了しました。
参加の皆さん、お疲れ様でした。
競技会終了後にフライトしてもらった時の結果がこれです。
今回からセンターラインの位置が変わったので、BINファイルを開く時に自動的に出てくる飛行面はズレが大きくて使い物にならなくなっています。
そこで、とりあえず見当をつけてカスタムサイトを作ってみました。
ダウンロードしてPCに保存してください。
MBP2.f3a
使い方は、
BINファイルを開くときに出てくる選択画面で、飛行場(Site selection)を「manual」にするとF3AZoneボタンが現れます。
そのボタンを押して、保存した.f3aファイルを指定すると飛行場の座標が入力されます。
「リボン図で水平飛行部分を見つけ出す」というのは、1Gの状態を見つけだそうとしているだけです。
同じ1Gのときに、正面と背面でPitch表示がどうなっているのか比べるためです。
リボン図での解析には限界があるので、上手くできると良いですね。
それができれば、ただ単にユニットの取り付け調整の問題だけで無く、機体の性能や操縦方法なども見えてくるかもしれません。
先月からフライトコーチを使い始めて、こちらのBBSやネットで調べながら使い方を少しずつ学んでいます。
私も取り付け方法が正しいかどうかをログデータから判断できないかと調べていました。確かにパターン演技ではロールが入らない水平飛行部は少なく、しかも高度一定で飛ばせていないようで。
水平部分の探し方としてはミッションプランナーで
"Convert Bin to Log"ボタンで.binファイルを.logファイルに変換し
"Review a Log"ボタンでその.logファイルを読み込み
"AHR2"でフィルタをかけた表示を.csvファイルで保存して
エクセルを使って必要な列(PitchとAlt)だけ残して.csvで保存して
そのファイルをFlow CSV Viewer で解析するのがよさそうに思えます。
https://apps.microsoft.com/detail/9nq7z06vrxbw?hl=en-us&gl=US
まだ解析途中ですか、とりあえずP25パターン全体でのピッチ角と高度の変化のグラフをアップしておきます
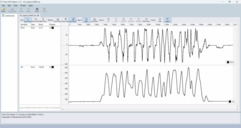
水平飛行部はほんとに少ないです。しかも高度一定で飛ばせていません。
高度とピッチ角だけではなくロール角やGPS座標も取り込んで、ロールを行っていない部分で座標から2点間の距離と高度変化から飛行軌跡の傾きを出し、ピッチ角との差を出してみようかと思っています。
別の機体の例です。

正面での水平飛行時のピッチ→ +2.4度
背面水平飛行時のピッチ→ -1.0度
取り付け誤差
{2.4-(-1.0)}÷2=3.4÷2=1.7度
という事で、1.7度上向きに取り付けられていた、となります。
また、110km/hでの迎角は0.7度となっています。
ただ、自分で数値を出していながら言うのも変な話ですが、
これらの数字はかなりいい加減な所もあります。
それは、リボン図で水平飛行部分を見つけ出すのが非常に難しいからで、
ちょっとした加減で数度の違いが出てしまうものです。
出来たら、実際にその難しさを体験してみてください。
大会の時のデータを集計中とのこと。
磐田RC掲示板