そのまま使えるならいいですね。 情報ありがとうございます。 機器によって少し結果が異なる様な感じもするので、ちょっと気にかけてみてください。
赤いLED点滅はGPS受信FIXの表示だそうです。
PathFinder使用時のスライド現象について解析しました。 長文です、御容赦を願います。 本日の飛行場でのdenkado様からの解析依頼、内容はプロッタでの再生画面でP23の背面からのインメルマンターン時の上昇がおかしい、、、スライドしている。 この現象は、インメルマンターン以外にも垂直上昇時に発生するとのこと。
今回の現象、ロール後の背面からのインメルマンターンにおいて直線からのハーフループ上昇時に奥行方向に明らかにスライドしています。プロッタ再生画面においても動きが変です。 プロッタ画面です。 上は、ジャッジビュー 下は、レフトビューです。
結論: ParhFinderは衛星捕捉能力が不足しているようです。 その結果として、推定計算結果にエラーが大きく、精度も取れないことが引き金になりスライド現象を発生しています。 本日、同時間帯に飛ばした私のP23フライトでの衛星捕捉数と比べました。 明らかにParhfinderでの衛星捕捉数は不足気味です。両者での2回目のフライトも確認しましたが同様でした。下記に結果を示します。
ミッションプランナーで解析結果です。 左がParhFinder(PF)、右がジャンプ等の異常はない私のフライトコーチ(F.C)です。 使用機材、飛行機体、フライトコントローラ+GPSはほぼ同じものです。
別トピックスの [機械学習によるジャンプに影響を与えるパラメータの分析]のTakJP様の情報から https://zawazawa.jp/flightcoach/topic/28
衛星捕捉数(NSats)は12以上、水平方向の精度(HDop)は小さいほど良い。 PFでの衛星捕捉数は最低が僅か10です。平均値も低いレベルです。 精度の数値も大きめに出ます。
衛星捕捉数(NSats) :10~16.25~19 @PF、16~18.85~19 @ F.C 水平方向の精度(HDop) : 0.65~0.71~1.1 @ PF、0.65~0.65~0.73@ F.C
下記閾値は0.6以下です。 PFは各エラーが大きめの値です。 PFのコンパスエラーが0.6以上を継続した時点からスライドを開始しています。 位置エラー(XKF4_SP) : 0~0.05~0.89 @ PF、 0~0.05 ~0.23@ F.C コンパスエラー(XKF4_SM): 0~0.20~1.86 @ PF、 0~0.19~0.44@ F.C 速度エラー(XKF4_SV) : 0~0.15~6.01 @ PF、 0~0.12~0.49 @ F.C
今回のインメルマンターンでのスライドは、 衛星捕捉数が限界の11~12個のところで生じています。その際の、GPS高度と計算による高度は著しく違っています。
上図は、ParhFinderでの衛星捕捉数 下図は、ParhFinderでのGPS(GPS_Alt)と計算(POS_Alt)での高度比較を一例として示します。
対策: 今後、GPSの置き場所を変更して捕捉数アップに繋がるか検討予定です。 PathFinderはGPSアンテナに対し同程度の高さのフライトコントローラの基板が横方向に近接しすぎることが原因と思われます。電子基板は金属のパターンで覆われ、電子部品も殆どが導電性です。 金属ですので衛星捕捉に影響を与えるます。 このため、背面飛行時において水平方向の衛星を捕捉するのにフライトコントローラ基板側の一面は衛星捕捉が抑制されてしまい捕捉数の不足が生じたものと推定できます。 水平飛行等のGPSが上を向いている場合は問題ありませんが、P23等の背面飛行の時間が長くかかる場合は要注意です。背面時に四方から受信したいのに、両者が近接すると三方からの水平方向の衛星からしか受信できません。
さらに、フライトコントローラ自身はクロック等による多数の高周波スイッチングノイズを発生します。言い換えれば、GPS受信、特にGPS内蔵のコンパスに影響を与えることは十分に考えられます。フライトコントローラ内にあるコンパスの使用を推奨しないのもこの理由と思われます。
ご参考: 私は当初からGPSとフライトコントローラの配置は基板一枚分の間隔を置くようにしています。例外として、フライトコントローラ上にGPSを配置したタイプもあります。この場合においても衛星受信を妨げることにはなりませんので衛星捕捉問題は生じていません。
なるほど。そうだったのですね。
飛行データの解析、ありがとうございました。 衛星捕捉数が明らかに違っていたのですね。 対応策が上手くいくといいのですが、手がかかりそうですね。
Denkado様、カメオ様 Denkado様にはPathFinderのテストをして頂きありがとうございます。 カメオ様、当初からフライトコーチのテストパイロットをして意見を頂き感謝です。 PathFinderを改造してキャリブレーションを可能にし、その後の確認飛行をしましたが現象は見つけられませんでした。 今回は実飛行を見た後でのプロッタでのフライト再生確認、明らかにスライド現象を認識できました。 対策を進めたいと思います。
衛星捕捉数のPathFinderと私のフライトコーチとの同時比較をしました。
今回は条件を平等とするため、機体に同時搭載した結果を報告します。 背面時での衛星捕捉が低下する傾向にあるため、各フライトともにp23終了後に高さの異なる背面飛行(20m~75m程度)数往復を加えました。
本日の結論: PathFinder(コンパス機能有効に改造)は衛星捕捉性能が劣ることを再確認しました。
検討内容と結果: PathFinderをキャノピー後側の上席に、私のフライトコーチはキャノピー前側の少し環境の悪い席に配置しました。 私のフライトコーチは45度傾斜アンテナではなく水平のものを使用しました。
本日は5回のフライトです。 PathFinder (PF)での衛星捕捉数は5フライトともに最低が8~11であり、私のフライトコーチ( F.C)は最低が13です。12以上のレベルが望ましい値ですので、PFは要求レベルを満足できません。 また、低い高度での背面飛行ほど捕捉数が低下する傾向がありました。しかし、一番低い値を示すのはp23でのインメルマンターンのループ上昇時とフィギュアMの一回目の降下底辺のループあたりで最低数を示します。
衛星捕捉数(NSats) 注、12以上が望ましい。 フライトはP23+低高度背面飛行 、下記数字は最低~平均~最高を示します。 第1回目: 10~17.25~19 @PF、14~17.95~19 @ F.C 第2回目: 8~16.66~19 @PF、15~17.97~19 @ F.C 第3回目: 8~16.33~19 @PF、13~17.93~19 @ F.C 第4回目: 11~17.98~20 @PF、16~20.08~22 @ F.C 第5回目: 11~17.98~20 @PF、17~20.52~22 @ F.C
ケースを不使用とし私のF.Cと同配置にすることも一案ですが進歩がありません。 PFのコンパクトなケースを利用した上で対策できれば一番良いのですが。 取敢えずは、ケースを生かし45度傾斜アンテナにチャレンジするかです。 どうやって対策すれば良いのか悩みます。
フィギュアMのループでの異常も、正に衛星捕捉数の数字通りですね。 動画の1:10あたりです。
仰るとおりです。 フィギュアMの一回目の降下底辺のループあたりの衛星捕捉数は著しく低下傾向にあります。軽度の場合は上昇時にスライドが発生して徐々に元に戻ることを私も経験しました。
降下底辺のループあたりは機体速度(約100km/h-->5.6m/0.2秒)があるのでGPSが追従(0.2秒毎サンプリング)できず、GPS捕捉が難しいのが関係するのかもしれません。捕捉数不足では正常な位置が割り出せず、計算での推定値と合わずにスライドもしくはジャンプに至ると推定します。
これは今回のフライトでの参考です。 どのような場面でも、衛星捕捉数がある程度以上あれば大丈夫のようです。
低高度での背面飛行時のものです。 上図はPFです。小さなジャンプ現象が発生しています。 背面での小さなハーフループ後のハーフロールで背面に戻る際に発生しています。この時の衛星捕捉数は10です。こちらも小さい動きですが飛行速度は90Km/h位です。
下図は比較対象のフライトコーチのものです。 異常はありません。上記ジャンプ時のこちらの衛星捕捉数は15です。 正常な位置捕捉が出来ているので計算値とほぼ同じでズレは大きくないと推定します。
約一か月後のPathfinderです。
改造その1: Pathfinder に付属のGPSを45度傾斜に改造して実験をしました。 付属のBN-880限定ですが、このGPSはバラツキ品なのか感度が悪いものです。 最初の写真を参照してください。
衛星捕捉数に少なさに変化はありませんでした。 しかし、45度傾斜改造GPSではジャンプ、スライド発生は一度もありません。 30フライト位の結果です。 XKF4(位置、コンパス、速度)のエラーも低減しているように感じます。 実用的に問題ないレベルになったと思います。
改造その2: Pathfinder に付属のGPS(BN-880)を最新型M10型GPSに置き換えました。 このGPSは都会のビルの間においても多数の衛星捕捉数を得ることを性能を売り物にしています。 特に水平方向の捕捉数、精度にメリットがあるようです。 写真2枚目です。 衛星捕捉数は驚きの数字を示します。 下記の改造3と同程度です。 晴れ、曇りあまり関係ありませんでした。
改造その3: 6軸センサを性能向上版に置き換えしたフライトコントローラ + 最新型M10型GPS で構成しました。さらに性能をアップを狙っています。 写真3枚目の真ん中です。 参考までに、右側は改造その2です。左側は置き換えしたフライトコントローラ + BN-880です。 改造その3の一例の結果です。(最低~平均~最高) 写真4枚目です。理想的な数字が並んでいます。
衛星捕捉数(NSats) :21~30.76~32 水平方向の精度(HDop) : 0.45~0.52~0.93 下記閾値は0.6以下です。 位置エラー(XKF4_SP) : 0~0.05~0.61 コンパスエラー(XKF4_SM) : 0~0.07~0.45 速度エラー(XKF4_SV) : 0~0.07~0.68
改造版は新スレッドで掲載予定です。
そのまま使えるならいいですね。
情報ありがとうございます。
機器によって少し結果が異なる様な感じもするので、ちょっと気にかけてみてください。
赤いLED点滅はGPS受信FIXの表示だそうです。
PathFinder使用時のスライド現象について解析しました。
長文です、御容赦を願います。
本日の飛行場でのdenkado様からの解析依頼、内容はプロッタでの再生画面でP23の背面からのインメルマンターン時の上昇がおかしい、、、スライドしている。
この現象は、インメルマンターン以外にも垂直上昇時に発生するとのこと。
今回の現象、ロール後の背面からのインメルマンターンにおいて直線からのハーフループ上昇時に奥行方向に明らかにスライドしています。プロッタ再生画面においても動きが変です。
プロッタ画面です。
上は、ジャッジビュー
下は、レフトビューです。
結論:
ParhFinderは衛星捕捉能力が不足しているようです。
その結果として、推定計算結果にエラーが大きく、精度も取れないことが引き金になりスライド現象を発生しています。
本日、同時間帯に飛ばした私のP23フライトでの衛星捕捉数と比べました。
明らかにParhfinderでの衛星捕捉数は不足気味です。両者での2回目のフライトも確認しましたが同様でした。下記に結果を示します。
ミッションプランナーで解析結果です。
左がParhFinder(PF)、右がジャンプ等の異常はない私のフライトコーチ(F.C)です。
使用機材、飛行機体、フライトコントローラ+GPSはほぼ同じものです。
別トピックスの
[機械学習によるジャンプに影響を与えるパラメータの分析]のTakJP様の情報から
https://zawazawa.jp/flightcoach/topic/28
衛星捕捉数(NSats)は12以上、水平方向の精度(HDop)は小さいほど良い。
PFでの衛星捕捉数は最低が僅か10です。平均値も低いレベルです。
精度の数値も大きめに出ます。
衛星捕捉数(NSats) :10~16.25~19 @PF、16~18.85~19 @ F.C
水平方向の精度(HDop) : 0.65~0.71~1.1 @ PF、0.65~0.65~0.73@ F.C
下記閾値は0.6以下です。
PFは各エラーが大きめの値です。
PFのコンパスエラーが0.6以上を継続した時点からスライドを開始しています。
位置エラー(XKF4_SP) : 0~0.05~0.89 @ PF、 0~0.05 ~0.23@ F.C
コンパスエラー(XKF4_SM): 0~0.20~1.86 @ PF、 0~0.19~0.44@ F.C
速度エラー(XKF4_SV) : 0~0.15~6.01 @ PF、 0~0.12~0.49 @ F.C
今回のインメルマンターンでのスライドは、
衛星捕捉数が限界の11~12個のところで生じています。その際の、GPS高度と計算による高度は著しく違っています。
上図は、ParhFinderでの衛星捕捉数

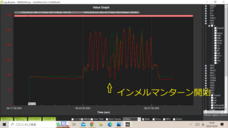
下図は、ParhFinderでのGPS(GPS_Alt)と計算(POS_Alt)での高度比較を一例として示します。
対策:
今後、GPSの置き場所を変更して捕捉数アップに繋がるか検討予定です。
PathFinderはGPSアンテナに対し同程度の高さのフライトコントローラの基板が横方向に近接しすぎることが原因と思われます。電子基板は金属のパターンで覆われ、電子部品も殆どが導電性です。
金属ですので衛星捕捉に影響を与えるます。
このため、背面飛行時において水平方向の衛星を捕捉するのにフライトコントローラ基板側の一面は衛星捕捉が抑制されてしまい捕捉数の不足が生じたものと推定できます。
水平飛行等のGPSが上を向いている場合は問題ありませんが、P23等の背面飛行の時間が長くかかる場合は要注意です。背面時に四方から受信したいのに、両者が近接すると三方からの水平方向の衛星からしか受信できません。
さらに、フライトコントローラ自身はクロック等による多数の高周波スイッチングノイズを発生します。言い換えれば、GPS受信、特にGPS内蔵のコンパスに影響を与えることは十分に考えられます。フライトコントローラ内にあるコンパスの使用を推奨しないのもこの理由と思われます。
ご参考:
私は当初からGPSとフライトコントローラの配置は基板一枚分の間隔を置くようにしています。例外として、フライトコントローラ上にGPSを配置したタイプもあります。この場合においても衛星受信を妨げることにはなりませんので衛星捕捉問題は生じていません。
なるほど。そうだったのですね。
飛行データの解析、ありがとうございました。
衛星捕捉数が明らかに違っていたのですね。
対応策が上手くいくといいのですが、手がかかりそうですね。
Denkado様、カメオ様
Denkado様にはPathFinderのテストをして頂きありがとうございます。
カメオ様、当初からフライトコーチのテストパイロットをして意見を頂き感謝です。
PathFinderを改造してキャリブレーションを可能にし、その後の確認飛行をしましたが現象は見つけられませんでした。
今回は実飛行を見た後でのプロッタでのフライト再生確認、明らかにスライド現象を認識できました。
対策を進めたいと思います。
衛星捕捉数のPathFinderと私のフライトコーチとの同時比較をしました。
今回は条件を平等とするため、機体に同時搭載した結果を報告します。
背面時での衛星捕捉が低下する傾向にあるため、各フライトともにp23終了後に高さの異なる背面飛行(20m~75m程度)数往復を加えました。
本日の結論:
PathFinder(コンパス機能有効に改造)は衛星捕捉性能が劣ることを再確認しました。
検討内容と結果:

PathFinderをキャノピー後側の上席に、私のフライトコーチはキャノピー前側の少し環境の悪い席に配置しました。
私のフライトコーチは45度傾斜アンテナではなく水平のものを使用しました。
本日は5回のフライトです。
PathFinder (PF)での衛星捕捉数は5フライトともに最低が8~11であり、私のフライトコーチ( F.C)は最低が13です。12以上のレベルが望ましい値ですので、PFは要求レベルを満足できません。
また、低い高度での背面飛行ほど捕捉数が低下する傾向がありました。しかし、一番低い値を示すのはp23でのインメルマンターンのループ上昇時とフィギュアMの一回目の降下底辺のループあたりで最低数を示します。
衛星捕捉数(NSats) 注、12以上が望ましい。
フライトはP23+低高度背面飛行 、下記数字は最低~平均~最高を示します。
第1回目: 10~17.25~19 @PF、14~17.95~19 @ F.C
第2回目: 8~16.66~19 @PF、15~17.97~19 @ F.C
第3回目: 8~16.33~19 @PF、13~17.93~19 @ F.C
第4回目: 11~17.98~20 @PF、16~20.08~22 @ F.C
第5回目: 11~17.98~20 @PF、17~20.52~22 @ F.C
ケースを不使用とし私のF.Cと同配置にすることも一案ですが進歩がありません。
PFのコンパクトなケースを利用した上で対策できれば一番良いのですが。
取敢えずは、ケースを生かし45度傾斜アンテナにチャレンジするかです。
どうやって対策すれば良いのか悩みます。
フィギュアMのループでの異常も、正に衛星捕捉数の数字通りですね。
動画の1:10あたりです。
仰るとおりです。
フィギュアMの一回目の降下底辺のループあたりの衛星捕捉数は著しく低下傾向にあります。軽度の場合は上昇時にスライドが発生して徐々に元に戻ることを私も経験しました。
降下底辺のループあたりは機体速度(約100km/h-->5.6m/0.2秒)があるのでGPSが追従(0.2秒毎サンプリング)できず、GPS捕捉が難しいのが関係するのかもしれません。捕捉数不足では正常な位置が割り出せず、計算での推定値と合わずにスライドもしくはジャンプに至ると推定します。
これは今回のフライトでの参考です。
どのような場面でも、衛星捕捉数がある程度以上あれば大丈夫のようです。
低高度での背面飛行時のものです。
上図はPFです。小さなジャンプ現象が発生しています。
背面での小さなハーフループ後のハーフロールで背面に戻る際に発生しています。この時の衛星捕捉数は10です。こちらも小さい動きですが飛行速度は90Km/h位です。
下図は比較対象のフライトコーチのものです。
異常はありません。上記ジャンプ時のこちらの衛星捕捉数は15です。
正常な位置捕捉が出来ているので計算値とほぼ同じでズレは大きくないと推定します。
約一か月後のPathfinderです。
改造その1:
Pathfinder に付属のGPSを45度傾斜に改造して実験をしました。
付属のBN-880限定ですが、このGPSはバラツキ品なのか感度が悪いものです。
最初の写真を参照してください。
衛星捕捉数に少なさに変化はありませんでした。
しかし、45度傾斜改造GPSではジャンプ、スライド発生は一度もありません。
30フライト位の結果です。
XKF4(位置、コンパス、速度)のエラーも低減しているように感じます。
実用的に問題ないレベルになったと思います。
改造その2:
Pathfinder に付属のGPS(BN-880)を最新型M10型GPSに置き換えました。
このGPSは都会のビルの間においても多数の衛星捕捉数を得ることを性能を売り物にしています。
特に水平方向の捕捉数、精度にメリットがあるようです。
写真2枚目です。
衛星捕捉数は驚きの数字を示します。
下記の改造3と同程度です。
晴れ、曇りあまり関係ありませんでした。
改造その3:
6軸センサを性能向上版に置き換えしたフライトコントローラ + 最新型M10型GPS
で構成しました。さらに性能をアップを狙っています。
写真3枚目の真ん中です。
参考までに、右側は改造その2です。左側は置き換えしたフライトコントローラ + BN-880です。
改造その3の一例の結果です。(最低~平均~最高)
写真4枚目です。理想的な数字が並んでいます。
衛星捕捉数(NSats) :21~30.76~32
水平方向の精度(HDop) : 0.45~0.52~0.93
下記閾値は0.6以下です。
位置エラー(XKF4_SP) : 0~0.05~0.61
コンパスエラー(XKF4_SM) : 0~0.07~0.45
速度エラー(XKF4_SV) : 0~0.07~0.68
改造版は新スレッドで掲載予定です。