再び「オリジンが50m以上ずれていて見られない」件ですがFlight Plotterに「Copy Origin」の機能があるのでこれを使うとPilotとCenterがOrigin座標となりとりあえずリボンは表示されます。このままだとリボン図の方向がコースからひどく狂いますが、Centerを 通常Pilot位置から1000m以上前方に設定すれば離着陸位置はちょっと怪しいですがパターンの確認には何とか使えるようです。
なるほど。 やってみたら、見られなかったフライトが表示できました。 soramonさんありがとうございます。
moon様、soramon様 いろいろと貴重な情報ありがとうございます。 私がLOGファイルやJSONファイルの解析を始めたのは、Plotterによる飛行軌跡のジャンプを何とか修正したいと思ったからです。皆さんがご指摘のように、ジャンプがいつ何時発生するのか、今の段階では予測するのが非常に困難です。であるならば、ジャンプが起こるのを前提に、LOGファイルを解析してジャンプ前後のデータをなるべく正常な値に近づけ、その結果を基にJSONファイルを書き換えてジャンプを修正しようと考えました。しかし、LOGファイルを解析すればするほど、この試みが困難なことが分かってきました。Plotterによる飛行軌跡のジャンプは、moon様ご指摘の通り、予測値と実際値のズレが限界を超えたときに発生していると思われます。今は拡張カルマンフィルターによる予測方法を良く理解しないと先に進めない状況です。 私が思い違いをしているところ、あるいはこうした方が良いよ、と言うようなことがございましたらご教示頂ければ幸いです。
Soramon様
リカバリに十分対応できます、ありがとうございました。 ご教示の方法で(サイトをマニュアルとして再設定後、Copy Originを押し、Submitを押す)表示されました。 左に60度位ずれていますが、十分に見ることができます。 BINファイルの位置情報を書き換えましたが、いまだに表示NGは解消されないので助かりました。
TakJP様
最小二乗法から始まり、カルマンフィルタ、、各種近似法がありますが、私には難しく殆ど理解していません。 ドローンは各種センサーの組合せの最新技術、それを使用したフライトコーチ、利用できる私たちは恵まれています。 計算方法含め近似して予想するのは非常に難しく、まだ万全ではないのだと思います。 より良くなることを願うのみです。
今後とも、解析の方法等を提供を頂ければ助かります。頭の活性化、知識向上になります。 また、ハード面でのジャンプ対策があればご教示を頂ければと思います。
Soramon様、皆様
Soramon様のシステムを参考にして、自分なりにフライトコーチにマイクロSDカードへの書込み制御を追加しました。 どうせ作ってもと躊躇していたところにSoramon様の素晴らしい情報、奮起せざる得ませんでした。感謝申し上げます。
プロッタへの表示100%OKです。また、少ない誤差レベルで飛行機位置を取得しています。動作確認も済み目標機能に問題なく第一目標(次回は電子制御化)を達成しました。
使用方法は、F.Cのシステムが安定(LED点滅->点灯)を確認、GPS捕捉(LEDが点滅開始)の確認を行います。その後、任意の時間経過後(最低5秒程度)にスライドスイッチをONします。この動作によりマイクロSDカードへのデータ書き込みを開始します。
今回は、機能確認用としメカ部品のみを使用した最小の部品構成としました。 取り付け後のフライトコーチの写真を添付します。
今回得られた各時点でのデータを添付します。 プロッタ上でのOrigin位置の高度とプロッタ表示の成功率を表したものです。 Denkado様の言われた、Origin位置の高度が高い場合にプロッタ表示NGの傾向がある感じがする、、の検証も考慮しました。以前(ノーマル時)はプロッタ上への表示成功率は61%程度、Origin位置の高度は比較的高めです。 OLED追加後の表示成功率は100%、Origin位置高度は少し低下が見られますが高めです。 OLED+マイクロSD書込み制御では、表示成功率は100%、Origin位置高度に大幅な低下が見られます。 また、Denkado様の感じたプロッタ表示NGの傾向について、データからもOrigin位置の高度が関係しているように思えます。
フライトコーチ導入後は50m制限に縛られ最短コースでの離陸を迫られていました。 これからは通常の離陸コースを滑走して離陸できそうです。 ありがとうございました。
moon様 以前投稿したようにARMING_REQUIRE=0だと起動後数秒でOLEDの表示が >>>ARMED!<<< となり状態を確認できないと思いますが ARMING_REQUIREは変更(0⇒1)されたのでしょうか? この場合は自動ArmしませんがArmはどのような方法で行っているのですか。 あるいはLOG_DISARMED=1にしてArmせずにログ記録しているのでしょうか? それとも他にArm中にOLEDの状態表示をさせる方法があるのでしょうか? ご教示いただければありがたいです。
もう一つですが、FC起動数秒後に外部からSD書込み開始した場合、ログファイルは途中から書込まれるのですか、それともFCのバッファにある程度残っていてログファイルの先頭部のFMTやPARMなども記録されるのですか?
分かりずらい文章で申し訳ございませんでした。 ご不明な点に対しては以下のとおりです。 今後も何なりとお問合せ願います。
Q:ARMING_REQUIREは変更(0⇒1)されたのでしょうか? A:今回は変更はしていません。変更すると、SDカードへの書き込みが禁止されるので。 簡単な機能追加により、任意位置でのSD書込みが正常に開始するかを確認するためです。
Q:あるいはLOG_DISARMED=1にしてArmせずにログ記録しているのでしょうか? A:ARMING_REQUIRE=0にしていますので自動的にArmします。従ってすぐにログ記録モードになります。しかし、今回の機能追加により、機能の操作によりカードに書き込みを開始していると思います。
Q:それとも他にArm中にOLEDの状態表示をさせる方法があるのでしょうか? A:Arming_checkのボックスを指定すれば、OLEDに表示されます。例えば、Soramon様が言われた1054ではGPSの状況等が表示されます。他は早くて読めません。 前にもお伝えしましたが、私の状況では異常等のアラームは一切表示されません。 このため、Armのみの表示を確認しています。
Q:FC起動数秒後に外部からSD書込み開始した場合、ログファイルは途中から書込まれるのですか、それともFCのバッファにある程度残っていてログファイルの先頭部のFMTやPARMなども記録されるのですか? A: ログファイルは、スイッチによる動作を行った時点から書き込まれていると思います。 ログファイルの先頭部のFMTやPARMなども記録されています。GPS値、POS値を見ても、上記の情報は書き込まれているように見えます。 他のログ情報にも違和感は感じません。 FCのバッファにある程度残っていてログファイル、、これは私には良くわかりません。 どのようなファイルが残っているかは、不勉強で申し訳なしです。
moon様 ご回答ありがとうございます。 ジャンプしまくる原因のヒントにならないかとピント外れの質問になってしまい申し訳ありませんでした。
Soramon様 とんでもありません。 ご質問ありがとうございました。
皆様 今回の機能追加の内容は表示後3日経過したため削除させていただきました。 本情報の推測からフライトコーチを改造された場合は自己責任となります。 ご了承をお願いいたします。
ミュゼット(単葉)の飛行高度について。 視点の高さを200mにして見ると、F-25のスクエア・バーチカル・エイトの上部がちょうどこの高さ(200m)でした。
視点の高さについては、見たい高度の「グリッド線が水平」になる様に画像を移動させているだけです。 例えば200mの高度ならこんな感じです。
飛行コースの奥行きが関連するので、例えば、ジャッジビューがこんな感じだったとしても、 この実際の高度は260m以上でした。
再び「オリジンが50m以上ずれていて見られない」件ですがFlight Plotterに「Copy Origin」の機能があるのでこれを使うとPilotとCenterがOrigin座標となりとりあえずリボンは表示されます。このままだとリボン図の方向がコースからひどく狂いますが、Centerを

通常Pilot位置から1000m以上前方に設定すれば離着陸位置はちょっと怪しいですがパターンの確認には何とか使えるようです。
なるほど。
やってみたら、見られなかったフライトが表示できました。
soramonさんありがとうございます。
moon様、soramon様
いろいろと貴重な情報ありがとうございます。
私がLOGファイルやJSONファイルの解析を始めたのは、Plotterによる飛行軌跡のジャンプを何とか修正したいと思ったからです。皆さんがご指摘のように、ジャンプがいつ何時発生するのか、今の段階では予測するのが非常に困難です。であるならば、ジャンプが起こるのを前提に、LOGファイルを解析してジャンプ前後のデータをなるべく正常な値に近づけ、その結果を基にJSONファイルを書き換えてジャンプを修正しようと考えました。しかし、LOGファイルを解析すればするほど、この試みが困難なことが分かってきました。Plotterによる飛行軌跡のジャンプは、moon様ご指摘の通り、予測値と実際値のズレが限界を超えたときに発生していると思われます。今は拡張カルマンフィルターによる予測方法を良く理解しないと先に進めない状況です。
私が思い違いをしているところ、あるいはこうした方が良いよ、と言うようなことがございましたらご教示頂ければ幸いです。
Soramon様
リカバリに十分対応できます、ありがとうございました。
ご教示の方法で(サイトをマニュアルとして再設定後、Copy Originを押し、Submitを押す)表示されました。
左に60度位ずれていますが、十分に見ることができます。
BINファイルの位置情報を書き換えましたが、いまだに表示NGは解消されないので助かりました。
TakJP様
最小二乗法から始まり、カルマンフィルタ、、各種近似法がありますが、私には難しく殆ど理解していません。
ドローンは各種センサーの組合せの最新技術、それを使用したフライトコーチ、利用できる私たちは恵まれています。
計算方法含め近似して予想するのは非常に難しく、まだ万全ではないのだと思います。
より良くなることを願うのみです。
今後とも、解析の方法等を提供を頂ければ助かります。頭の活性化、知識向上になります。
また、ハード面でのジャンプ対策があればご教示を頂ければと思います。
Soramon様、皆様
Soramon様のシステムを参考にして、自分なりにフライトコーチにマイクロSDカードへの書込み制御を追加しました。
どうせ作ってもと躊躇していたところにSoramon様の素晴らしい情報、奮起せざる得ませんでした。感謝申し上げます。
プロッタへの表示100%OKです。また、少ない誤差レベルで飛行機位置を取得しています。動作確認も済み目標機能に問題なく第一目標(次回は電子制御化)を達成しました。
使用方法は、F.Cのシステムが安定(LED点滅->点灯)を確認、GPS捕捉(LEDが点滅開始)の確認を行います。その後、任意の時間経過後(最低5秒程度)にスライドスイッチをONします。この動作によりマイクロSDカードへのデータ書き込みを開始します。
今回は、機能確認用としメカ部品のみを使用した最小の部品構成としました。

取り付け後のフライトコーチの写真を添付します。
今回得られた各時点でのデータを添付します。
プロッタ上でのOrigin位置の高度とプロッタ表示の成功率を表したものです。
Denkado様の言われた、Origin位置の高度が高い場合にプロッタ表示NGの傾向がある感じがする、、の検証も考慮しました。以前(ノーマル時)はプロッタ上への表示成功率は61%程度、Origin位置の高度は比較的高めです。
OLED追加後の表示成功率は100%、Origin位置高度は少し低下が見られますが高めです。
OLED+マイクロSD書込み制御では、表示成功率は100%、Origin位置高度に大幅な低下が見られます。
また、Denkado様の感じたプロッタ表示NGの傾向について、データからもOrigin位置の高度が関係しているように思えます。
フライトコーチ導入後は50m制限に縛られ最短コースでの離陸を迫られていました。
これからは通常の離陸コースを滑走して離陸できそうです。
ありがとうございました。
moon様
以前投稿したようにARMING_REQUIRE=0だと起動後数秒でOLEDの表示が
>>>ARMED!<<< となり状態を確認できないと思いますが
ARMING_REQUIREは変更(0⇒1)されたのでしょうか?
この場合は自動ArmしませんがArmはどのような方法で行っているのですか。
あるいはLOG_DISARMED=1にしてArmせずにログ記録しているのでしょうか?
それとも他にArm中にOLEDの状態表示をさせる方法があるのでしょうか?
ご教示いただければありがたいです。
もう一つですが、FC起動数秒後に外部からSD書込み開始した場合、ログファイルは途中から書込まれるのですか、それともFCのバッファにある程度残っていてログファイルの先頭部のFMTやPARMなども記録されるのですか?
Soramon様
分かりずらい文章で申し訳ございませんでした。
ご不明な点に対しては以下のとおりです。
今後も何なりとお問合せ願います。
Q:ARMING_REQUIREは変更(0⇒1)されたのでしょうか?
A:今回は変更はしていません。変更すると、SDカードへの書き込みが禁止されるので。
簡単な機能追加により、任意位置でのSD書込みが正常に開始するかを確認するためです。
Q:あるいはLOG_DISARMED=1にしてArmせずにログ記録しているのでしょうか?
A:ARMING_REQUIRE=0にしていますので自動的にArmします。従ってすぐにログ記録モードになります。しかし、今回の機能追加により、機能の操作によりカードに書き込みを開始していると思います。
Q:それとも他にArm中にOLEDの状態表示をさせる方法があるのでしょうか?
A:Arming_checkのボックスを指定すれば、OLEDに表示されます。例えば、Soramon様が言われた1054ではGPSの状況等が表示されます。他は早くて読めません。
前にもお伝えしましたが、私の状況では異常等のアラームは一切表示されません。
このため、Armのみの表示を確認しています。
Q:FC起動数秒後に外部からSD書込み開始した場合、ログファイルは途中から書込まれるのですか、それともFCのバッファにある程度残っていてログファイルの先頭部のFMTやPARMなども記録されるのですか?
A: ログファイルは、スイッチによる動作を行った時点から書き込まれていると思います。
ログファイルの先頭部のFMTやPARMなども記録されています。GPS値、POS値を見ても、上記の情報は書き込まれているように見えます。
他のログ情報にも違和感は感じません。
FCのバッファにある程度残っていてログファイル、、これは私には良くわかりません。
どのようなファイルが残っているかは、不勉強で申し訳なしです。
moon様
ご回答ありがとうございます。
ジャンプしまくる原因のヒントにならないかとピント外れの質問になってしまい申し訳ありませんでした。
Soramon様
とんでもありません。
ご質問ありがとうございました。
皆様
今回の機能追加の内容は表示後3日経過したため削除させていただきました。
本情報の推測からフライトコーチを改造された場合は自己責任となります。
ご了承をお願いいたします。
ミュゼット(単葉)の飛行高度について。
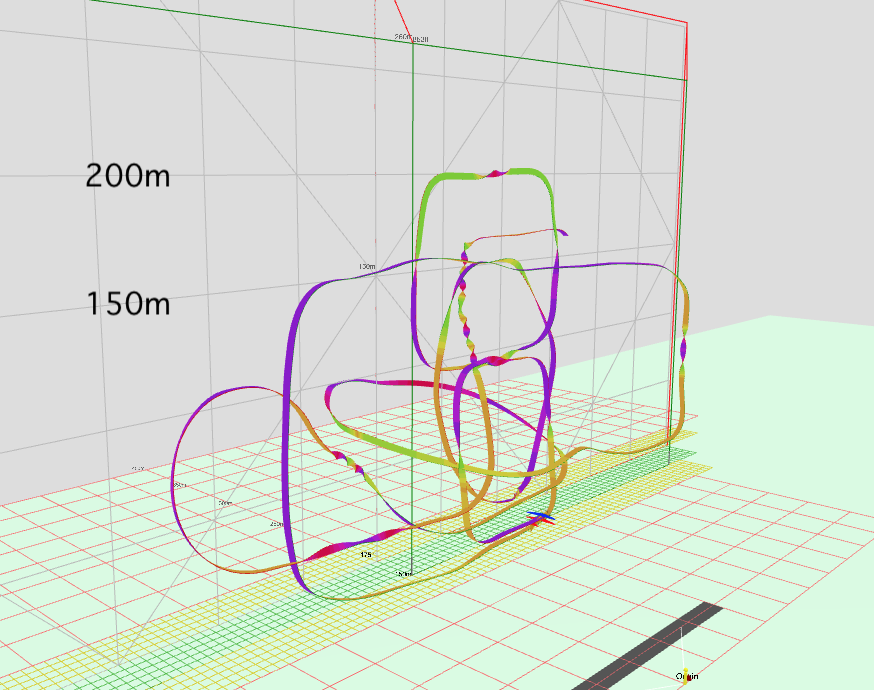
視点の高さを200mにして見ると、F-25のスクエア・バーチカル・エイトの上部がちょうどこの高さ(200m)でした。
視点の高さについては、見たい高度の「グリッド線が水平」になる様に画像を移動させているだけです。
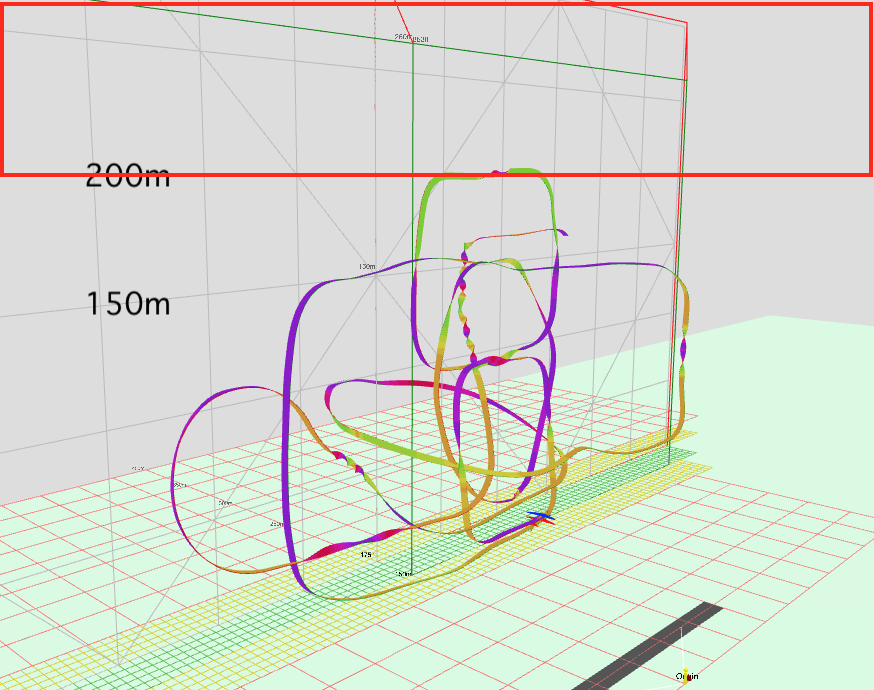
例えば200mの高度ならこんな感じです。
飛行コースの奥行きが関連するので、例えば、ジャッジビューがこんな感じだったとしても、
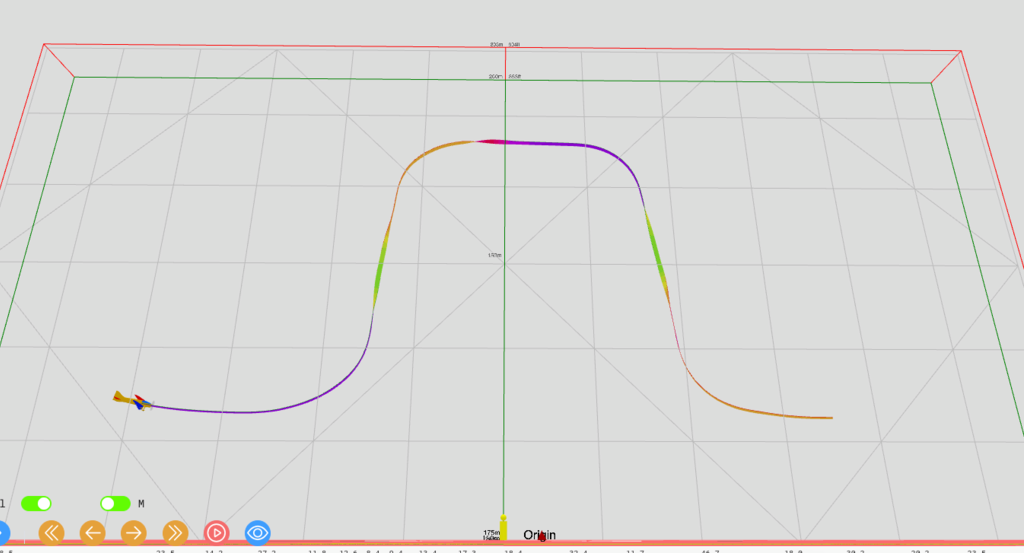
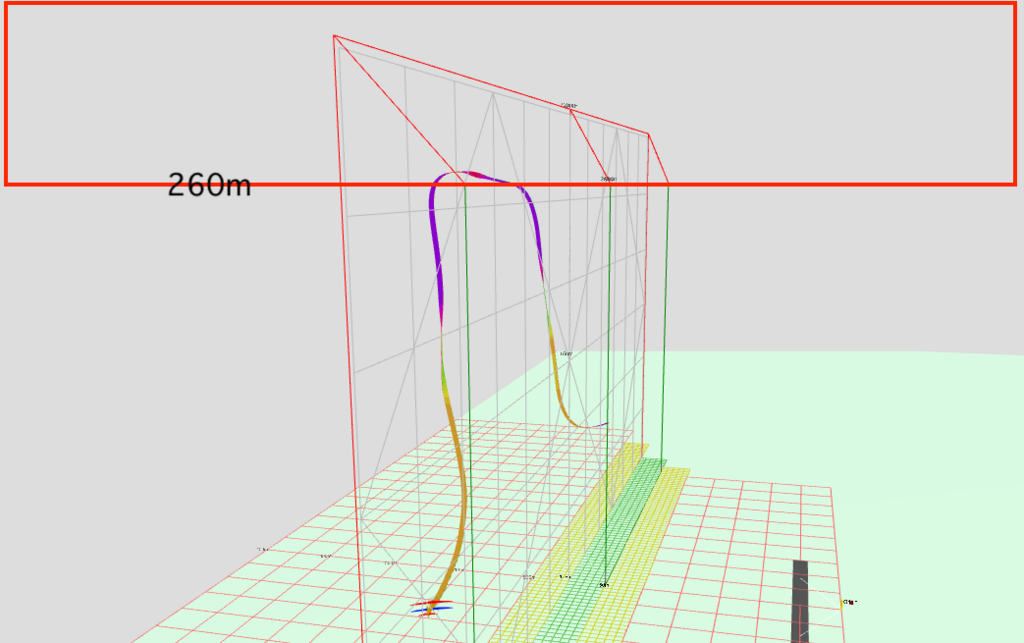
この実際の高度は260m以上でした。